Using a Distance Sensor to Detect Deviations in a Planar Surface

0
Sign in to get full access
Overview
- The paper describes a method for detecting deviations in a planar surface using a distance sensor.
- The key steps involve:
- Capturing distance measurements from a sensor at various points on the surface
- Fitting a plane to the measured points
- Analyzing the residuals to identify regions that deviate from the fitted plane
Plain English Explanation
The researchers developed a technique to detect bumps, dents, or other irregularities on a flat surface using a distance sensor. They first take measurements at multiple locations on the surface to get a sense of its overall shape. They then fit a flat plane to the measured points and look at how much each point deviates from that ideal plane. Any areas with larger-than-normal deviations likely indicate a problem on the surface, like a raised or sunken spot. This allows them to identify problems without having to visually inspect the entire surface.
Technical Explanation
The paper outlines a process for using a distance sensor to detect deviations from a flat surface. First, the sensor takes measurements at various points across the surface. The researchers then fit a plane to the measured points using a least-squares approach. Finally, they analyze the residuals, or differences between the measured points and the fitted plane, to identify regions that deviate significantly from the overall planar surface. This technique allows them to efficiently detect obstacles or distortions in the surface without having to visually inspect the entire area.
Critical Analysis
The paper presents a straightforward and effective approach for using distance measurements to identify deviations in a planar surface. However, the authors do not provide much discussion of the limitations or potential issues with the technique. For example, the sensor accuracy, sampling density, and environmental factors could all impact the ability to reliably detect small defects. Additionally, the paper does not address how this method would scale to larger or more complex surfaces. Further research would be needed to understand the real-world applicability and performance bounds of this approach.
Conclusion
This paper demonstrates a novel way to leverage a distance sensor to efficiently detect irregularities in a flat surface. By fitting a plane to the measured points and analyzing the residuals, the researchers can identify localized deviations without having to visually inspect the entire area. This technique could have applications in quality control, surface inspection, and other scenarios where quickly identifying surface defects is important. While the paper lacks a deeper discussion of limitations, it provides a solid foundation for further development and testing of this distance-based deviation detection approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Using a Distance Sensor to Detect Deviations in a Planar Surface
Carter Sifferman, William Sun, Mohit Gupta, Michael Gleicher
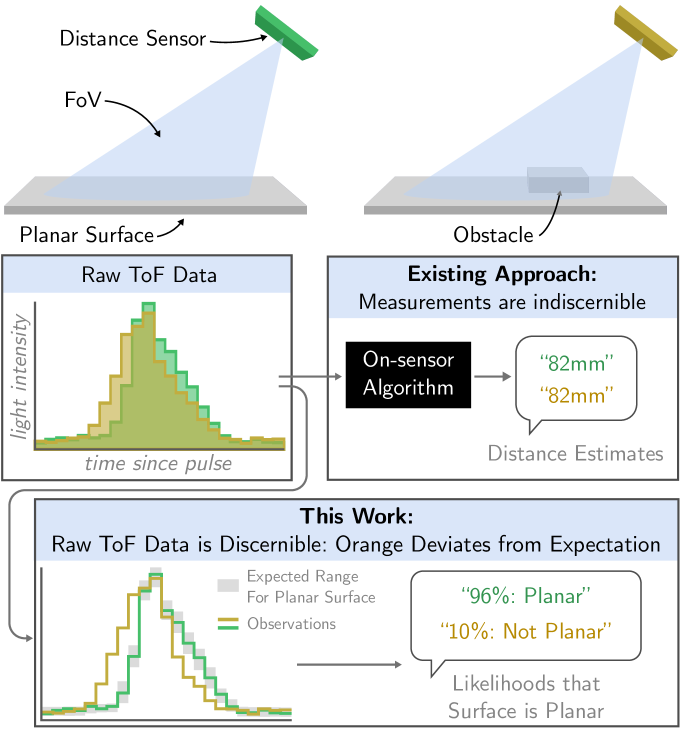
We investigate methods for determining if a planar surface contains geometric deviations (e.g., protrusions, objects, divots, or cliffs) using only an instantaneous measurement from a miniature optical time-of-flight sensor. The key to our method is to utilize the entirety of information encoded in raw time-of-flight data captured by off-the-shelf distance sensors. We provide an analysis of the problem in which we identify the key ambiguity between geometry and surface photometrics. To overcome this challenging ambiguity, we fit a Gaussian mixture model to a small dataset of planar surface measurements. This model implicitly captures the expected geometry and distribution of photometrics of the planar surface and is used to identify measurements that are likely to contain deviations. We characterize our method on a variety of surfaces and planar deviations across a range of scenarios. We find that our method utilizing raw time-of-flight data outperforms baselines which use only derived distance estimates. We build an example application in which our method enables mobile robot obstacle and cliff avoidance over a wide field-of-view.
Read more8/9/2024
0
Localization in Dynamic Planar Environments Using Few Distance Measurements
Michael M. Bilevich, Shahar Guini, Dan Halperin
We present a method for determining the unknown location of a sensor placed in a known 2D environment in the presence of unknown dynamic obstacles, using only few distance measurements. We present guarantees on the quality of the localization, which are robust under mild assumptions on the density of the unknown/dynamic obstacles in the known environment. We demonstrate the effectiveness of our method in simulated experiments for different environments and varying dynamic-obstacle density. Our open source software is available at https://github.com/TAU-CGL/vb-fdml2-public.
Read more8/20/2024

0
Reinforcement Learning Approach to Optimizing Profilometric Sensor Trajectories for Surface Inspection
Sara Roos-Hoefgeest, Mario Roos-Hoefgeest, Ignacio Alvarez, Rafael C. Gonz'alez
High-precision surface defect detection in manufacturing is essential for ensuring quality control. Laser triangulation profilometric sensors are key to this process, providing detailed and accurate surface measurements over a line. To achieve a complete and precise surface scan, accurate relative motion between the sensor and the workpiece is required. It is crucial to control the sensor pose to maintain optimal distance and relative orientation to the surface. It is also important to ensure uniform profile distribution throughout the scanning process. This paper presents a novel Reinforcement Learning (RL) based approach to optimize robot inspection trajectories for profilometric sensors. Building upon the Boustrophedon scanning method, our technique dynamically adjusts the sensor position and tilt to maintain optimal orientation and distance from the surface, while also ensuring a consistent profile distance for uniform and high-quality scanning. Utilizing a simulated environment based on the CAD model of the part, we replicate real-world scanning conditions, including sensor noise and surface irregularities. This simulation-based approach enables offline trajectory planning based on CAD models. Key contributions include the modeling of the state space, action space, and reward function, specifically designed for inspection applications using profilometric sensors. We use Proximal Policy Optimization (PPO) algorithm to efficiently train the RL agent, demonstrating its capability to optimize inspection trajectories with profilometric sensors. To validate our approach, we conducted several experiments where a model trained on a specific training piece was tested on various parts in simulation. Also, we conducted a real-world experiment by executing the optimized trajectory, generated offline from a CAD model, to inspect a part using a UR3e robotic arm model.
Read more9/6/2024
📊
0
NIGHT -- Non-Line-of-Sight Imaging from Indirect Time of Flight Data
Matteo Caligiuri, Adriano Simonetto, Pietro Zanuttigh
The acquisition of objects outside the Line-of-Sight of cameras is a very intriguing but also extremely challenging research topic. Recent works showed the feasibility of this idea exploiting transient imaging data produced by custom direct Time of Flight sensors. In this paper, for the first time, we tackle this problem using only data from an off-the-shelf indirect Time of Flight sensor without any further hardware requirement. We introduced a Deep Learning model able to re-frame the surfaces where light bounces happen as a virtual mirror. This modeling makes the task easier to handle and also facilitates the construction of annotated training data. From the obtained data it is possible to retrieve the depth information of the hidden scene. We also provide a first-in-its-kind synthetic dataset for the task and demonstrate the feasibility of the proposed idea over it.
Read more8/15/2024