LuSNAR:A Lunar Segmentation, Navigation and Reconstruction Dataset based on Muti-sensor for Autonomous Exploration

0
📶
Sign in to get full access
Overview
- Lunar exploration missions require higher levels of autonomy for rovers
- Environmental perception and navigation algorithms are crucial for autonomous exploration
- Existing lunar datasets are often limited in scope, lacking diverse scenes and high-precision ground truth labels
- To address this, the researchers propose a multi-task, multi-scene, and multi-label lunar benchmark dataset called LuSNAR
Plain English Explanation
The moon is a complex and challenging environment to explore, and lunar rovers need to be able to navigate autonomously to effectively carry out their missions. The key to this is having robust environmental perception and navigation algorithms. However, the existing datasets that researchers use to develop and test these algorithms are often narrow in focus, lacking the diverse scenes and detailed ground truth data that would be needed to comprehensively evaluate the performance of these systems.
To address this, the researchers have created a new lunar benchmark dataset called LuSNAR. This dataset includes a wide variety of high-resolution stereo image pairs, panoramic semantic labels, dense depth maps, LiDAR point clouds, and rover position data, all drawn from 9 different lunar simulation scenes built using the Unreal Engine. This rich, diverse set of data can be used to thoroughly test algorithms for autonomous environment perception and navigation on the lunar surface.
Technical Explanation
The researchers developed the LuSNAR dataset to provide a comprehensive testbed for evaluating the performance of autonomous perception and navigation systems for lunar exploration. The dataset includes a variety of sensing modalities, including high-resolution stereo imagery, panoramic semantic segmentation labels, dense depth maps, and LiDAR point clouds, all captured across 9 diverse lunar simulation scenes created in Unreal Engine.
Each scene was designed to represent a different type of lunar terrain, varying in factors like topographic relief and object density. This diversity is intended to stress-test the robustness of perception and navigation algorithms, ensuring they can handle the wide range of conditions encountered on the lunar surface.
To validate the utility of the dataset, the researchers evaluated the performance of several key algorithms, including semantic segmentation, 3D reconstruction, and autonomous navigation. The results demonstrate that LuSNAR provides a valuable benchmark for assessing the capabilities of these critical autonomous systems.
Critical Analysis
The LuSNAR dataset represents a significant advancement in the availability of comprehensive, high-quality lunar data for the research community. By providing a diverse range of sensing modalities and simulated environments, it addresses a key limitation of many existing lunar datasets that are often narrowly focused on a single task or scene type.
However, it's important to note that this is still a simulated dataset, and while great care has been taken to ensure the realism of the Unreal Engine environments, there may be differences between these virtual landscapes and the actual conditions found on the lunar surface. Further validation and testing will be needed to ensure the algorithms developed using LuSNAR data can seamlessly translate to real-world lunar exploration missions.
Additionally, the dataset is currently limited to a single rover platform and sensor suite. Expanding the dataset to include a wider variety of rover designs and sensor configurations would help to make the benchmarking more representative of the diverse set of systems that may be deployed on future lunar missions.
Conclusion
The LuSNAR dataset provides a valuable new resource for the development and evaluation of autonomous perception and navigation algorithms for lunar exploration. By offering a rich, diverse set of sensing data across multiple simulated lunar environments, it enables more comprehensive and rigorous testing of these critical systems. As lunar exploration missions become increasingly complex, tools like LuSNAR will be essential for ensuring the robustness and reliability of the underlying autonomous capabilities required for successful autonomous operations on the moon.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📶
0
LuSNAR:A Lunar Segmentation, Navigation and Reconstruction Dataset based on Muti-sensor for Autonomous Exploration
Jiayi Liu, Qianyu Zhang, Xue Wan, Shengyang Zhang, Yaolin Tian, Haodong Han, Yutao Zhao, Baichuan Liu, Zeyuan Zhao, Xubo Luo
With the complexity of lunar exploration missions, the moon needs to have a higher level of autonomy. Environmental perception and navigation algorithms are the foundation for lunar rovers to achieve autonomous exploration. The development and verification of algorithms require highly reliable data support. Most of the existing lunar datasets are targeted at a single task, lacking diverse scenes and high-precision ground truth labels. To address this issue, we propose a multi-task, multi-scene, and multi-label lunar benchmark dataset LuSNAR. This dataset can be used for comprehensive evaluation of autonomous perception and navigation systems, including high-resolution stereo image pairs, panoramic semantic labels, dense depth maps, LiDAR point clouds, and the position of rover. In order to provide richer scene data, we built 9 lunar simulation scenes based on Unreal Engine. Each scene is divided according to topographic relief and the density of objects. To verify the usability of the dataset, we evaluated and analyzed the algorithms of semantic segmentation, 3D reconstruction, and autonomous navigation. The experiment results prove that the dataset proposed in this paper can be used for ground verification of tasks such as autonomous environment perception and navigation, and provides a lunar benchmark dataset for testing the accessibility of algorithm metrics. We make LuSNAR publicly available at: https://github.com/autumn999999/LuSNAR-dataset.
Read more9/6/2024

0
Synthetic Lunar Terrain: A Multimodal Open Dataset for Training and Evaluating Neuromorphic Vision Algorithms
Marcus Martens, Kevin Farries, John Culton, Tat-Jun Chin
Synthetic Lunar Terrain (SLT) is an open dataset collected from an analogue test site for lunar missions, featuring synthetic craters in a high-contrast lighting setup. It includes several side-by-side captures from event-based and conventional RGB cameras, supplemented with a high-resolution 3D laser scan for depth estimation. The event-stream recorded from the neuromorphic vision sensor of the event-based camera is of particular interest as this emerging technology provides several unique advantages, such as high data rates, low energy consumption and resilience towards scenes of high dynamic range. SLT provides a solid foundation to analyse the limits of RGB-cameras and potential advantages or synergies in utilizing neuromorphic visions with the goal of enabling and improving lunar specific applications like rover navigation, landing in cratered environments or similar.
Read more9/2/2024
0
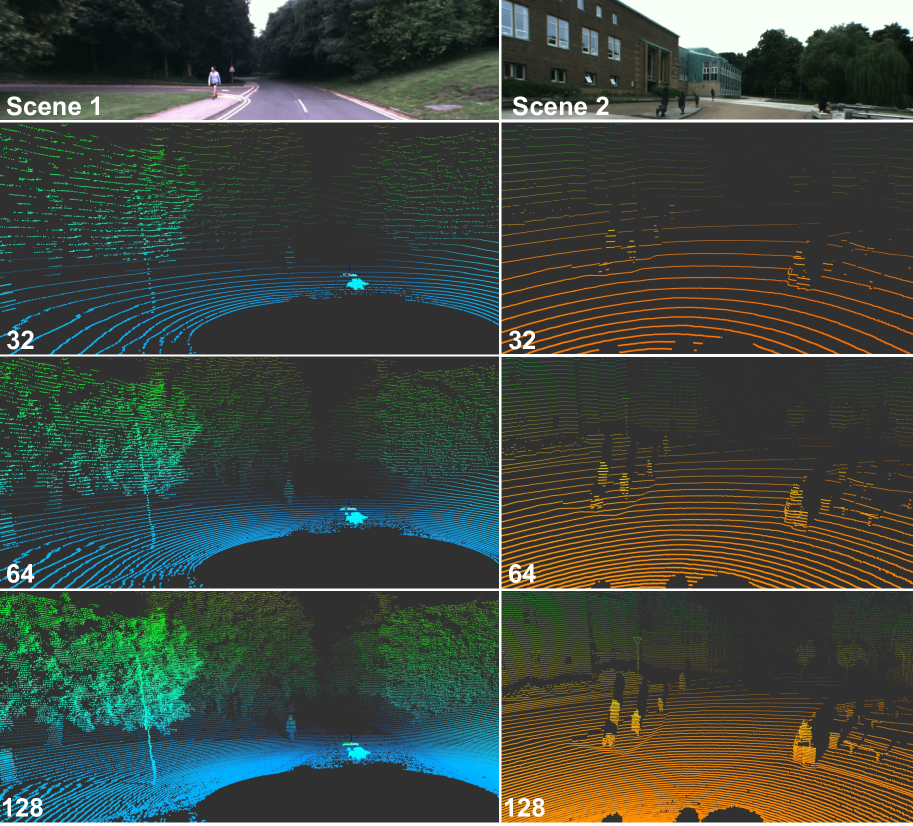
DurLAR: A High-fidelity 128-channel LiDAR Dataset with Panoramic Ambient and Reflectivity Imagery for Multi-modal Autonomous Driving Applications
Li Li, Khalid N. Ismail, Hubert P. H. Shum, Toby P. Breckon
We present DurLAR, a high-fidelity 128-channel 3D LiDAR dataset with panoramic ambient (near infrared) and reflectivity imagery, as well as a sample benchmark task using depth estimation for autonomous driving applications. Our driving platform is equipped with a high resolution 128 channel LiDAR, a 2MPix stereo camera, a lux meter and a GNSS/INS system. Ambient and reflectivity images are made available along with the LiDAR point clouds to facilitate multi-modal use of concurrent ambient and reflectivity scene information. Leveraging DurLAR, with a resolution exceeding that of prior benchmarks, we consider the task of monocular depth estimation and use this increased availability of higher resolution, yet sparse ground truth scene depth information to propose a novel joint supervised/self-supervised loss formulation. We compare performance over both our new DurLAR dataset, the established KITTI benchmark and the Cityscapes dataset. Our evaluation shows our joint use supervised and self-supervised loss terms, enabled via the superior ground truth resolution and availability within DurLAR improves the quantitative and qualitative performance of leading contemporary monocular depth estimation approaches (RMSE=3.639, Sq Rel=0.936).
Read more6/17/2024
🚀
0
New!High performance Lunar landing simulations
J'er'emy Lebreton, Roland Brochard, Nicolas Ollagnier, Matthieu Baudry, Adrien Hadj Salah, Gr'egory Jonniaux, Keyvan Kanani, Matthieu Le Goff, Aurore Masson
Autonomous precision navigation to land onto the Moon relies on vision sensors. Computer vision algorithms are designed, trained and tested using synthetic simulations. High quality terrain models have been produced by Moon orbiters developed by several nations, with resolutions ranging from tens or hundreds of meters globally down to few meters locally. The SurRender software is a powerful simulator able to exploit the full potential of these datasets in raytracing. New interfaces include tools to fuse multi-resolution DEMs and procedural texture generation. A global model of the Moon at 20m resolution was integrated representing several terabytes of data which SurRender can render continuously and in real-time. This simulator will be a precious asset for the development of future missions.
Read more9/19/2024