MapDistill: Boosting Efficient Camera-based HD Map Construction via Camera-LiDAR Fusion Model Distillation

0

Sign in to get full access
Overview
- This paper presents MapDistill, a novel approach to efficiently construct high-definition (HD) maps using a camera-based system with the help of camera-LiDAR fusion and knowledge distillation.
- The key idea is to leverage the complementary strengths of cameras and LiDAR sensors to build a lightweight, accurate HD map construction model, which can be deployed on resource-constrained edge devices.
- The authors demonstrate that MapDistill can significantly outperform camera-only and LiDAR-only baselines in terms of efficiency and accuracy, making it a promising solution for real-world autonomous driving applications.
Plain English Explanation
The researchers developed a new method called MapDistill to create detailed maps for self-driving cars using camera sensors instead of expensive LiDAR sensors. LiDAR distill is a technology that uses lasers to measure distances, but it can be costly.
MapDistill combines the information from both cameras and LiDAR sensors to train a more efficient and accurate map-making model. It works by taking the knowledge learned by a larger, more complex model that uses both cameras and LiDAR, and distilling it into a smaller, lighter-weight model that only uses cameras. This camera-clustering-based knowledge distillation approach allows the camera-only model to perform almost as well as the more expensive LiDAR-based one.
The key advantage of MapDistill is that it can create high-quality maps using just camera sensors, which are much cheaper and more widely available than LiDAR. This makes it a more practical solution for deploying self-driving car technology at scale. By teaching the camera model from the LiDAR model, MapDistill is able to achieve significantly better performance than using cameras alone, bringing us closer to affordable, camera-based autonomous driving.
Technical Explanation
The MapDistill framework consists of two main components: a camera-LiDAR fusion model and a knowledge distillation process to create an efficient camera-only model.
The fusion model takes input from both camera and LiDAR sensors and learns a high-quality HD map representation. This model serves as the "teacher" that will transfer its knowledge to the lightweight "student" model.
The distillation process involves training the camera-only student model to mimic the outputs of the fusion teacher model. By distilling the knowledge from the teacher, the student can learn to produce accurate HD maps using only camera inputs, without the need for expensive LiDAR.
The authors evaluate MapDistill on several benchmark datasets and show that it significantly outperforms camera-only and LiDAR-only baselines in terms of both efficiency and accuracy. For example, the distilled camera-only model achieves 92% of the fusion model's performance while being 5.4x more efficient.
Critical Analysis
The authors acknowledge that while MapDistill demonstrates promising results, there are still some limitations to address in future work. For instance, the distillation process relies on having access to a high-quality fusion model, which may not always be available in real-world scenarios.
Additionally, the paper focuses on static HD map construction, but extending the approach to handle dynamic elements like moving vehicles and pedestrians could further enhance its practical applicability for autonomous driving.
Another area for improvement could be investigating more advanced distillation techniques, such as distilling across modalities, to further bridge the performance gap between the fusion and camera-only models.
Overall, MapDistill represents an important step towards making camera-based HD mapping a viable and cost-effective solution for autonomous driving applications. By strategically combining sensor modalities and leveraging knowledge distillation, the researchers have demonstrated a compelling approach to boosting the efficiency and accuracy of camera-based mapping systems.
Conclusion
The MapDistill framework introduces a novel approach to efficiently constructing high-definition maps for autonomous driving using a camera-based system. By fusing camera and LiDAR data and then distilling the knowledge into a lightweight, camera-only model, the researchers have shown a promising way to enable affordable, camera-based autonomous driving solutions.
The key contribution of this work is the ability to achieve near-LiDAR performance using only camera inputs, which are much more widely available and cost-effective. This represents an important step forward in making autonomous driving technology more accessible and scalable.
While there are still some limitations to address, the findings of this paper suggest that camera-based HD mapping, powered by innovative techniques like knowledge distillation, could play a crucial role in the future of self-driving cars and other autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MapDistill: Boosting Efficient Camera-based HD Map Construction via Camera-LiDAR Fusion Model Distillation
Xiaoshuai Hao, Ruikai Li, Hui Zhang, Dingzhe Li, Rong Yin, Sangil Jung, Seung-In Park, ByungIn Yoo, Haimei Zhao, Jing Zhang
Online high-definition (HD) map construction is an important and challenging task in autonomous driving. Recently, there has been a growing interest in cost-effective multi-view camera-based methods without relying on other sensors like LiDAR. However, these methods suffer from a lack of explicit depth information, necessitating the use of large models to achieve satisfactory performance. To address this, we employ the Knowledge Distillation (KD) idea for efficient HD map construction for the first time and introduce a novel KD-based approach called MapDistill to transfer knowledge from a high-performance camera-LiDAR fusion model to a lightweight camera-only model. Specifically, we adopt the teacher-student architecture, i.e., a camera-LiDAR fusion model as the teacher and a lightweight camera model as the student, and devise a dual BEV transform module to facilitate cross-modal knowledge distillation while maintaining cost-effective camera-only deployment. Additionally, we present a comprehensive distillation scheme encompassing cross-modal relation distillation, dual-level feature distillation, and map head distillation. This approach alleviates knowledge transfer challenges between modalities, enabling the student model to learn improved feature representations for HD map construction. Experimental results on the challenging nuScenes dataset demonstrate the effectiveness of MapDistill, surpassing existing competitors by over 7.7 mAP or 4.5X speedup.
Read more7/17/2024
0
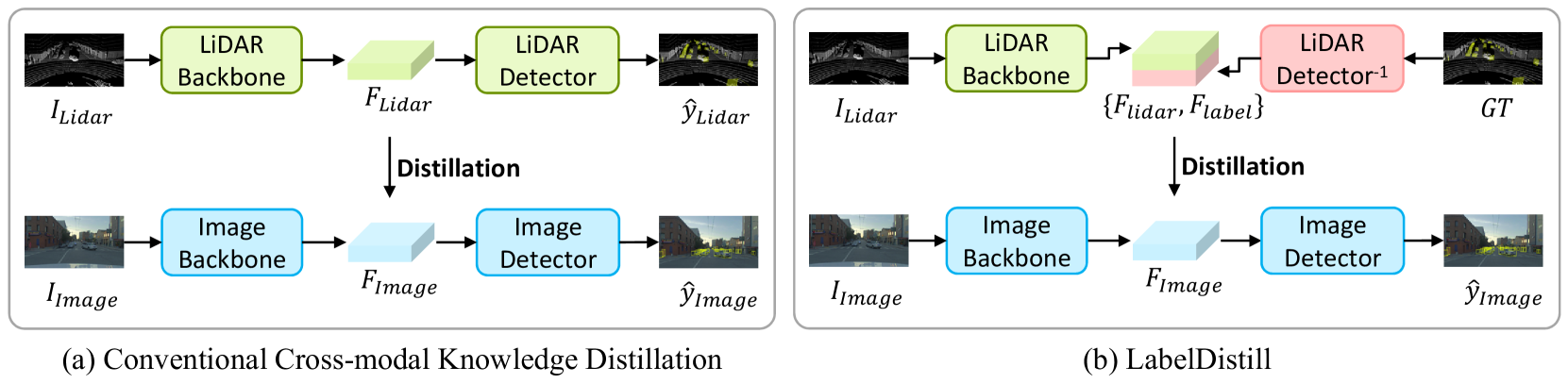
LabelDistill: Label-guided Cross-modal Knowledge Distillation for Camera-based 3D Object Detection
Sanmin Kim, Youngseok Kim, Sihwan Hwang, Hyeonjun Jeong, Dongsuk Kum
Recent advancements in camera-based 3D object detection have introduced cross-modal knowledge distillation to bridge the performance gap with LiDAR 3D detectors, leveraging the precise geometric information in LiDAR point clouds. However, existing cross-modal knowledge distillation methods tend to overlook the inherent imperfections of LiDAR, such as the ambiguity of measurements on distant or occluded objects, which should not be transferred to the image detector. To mitigate these imperfections in LiDAR teacher, we propose a novel method that leverages aleatoric uncertainty-free features from ground truth labels. In contrast to conventional label guidance approaches, we approximate the inverse function of the teacher's head to effectively embed label inputs into feature space. This approach provides additional accurate guidance alongside LiDAR teacher, thereby boosting the performance of the image detector. Additionally, we introduce feature partitioning, which effectively transfers knowledge from the teacher modality while preserving the distinctive features of the student, thereby maximizing the potential of both modalities. Experimental results demonstrate that our approach improves mAP and NDS by 5.1 points and 4.9 points compared to the baseline model, proving the effectiveness of our approach. The code is available at https://github.com/sanmin0312/LabelDistill
Read more7/16/2024
0
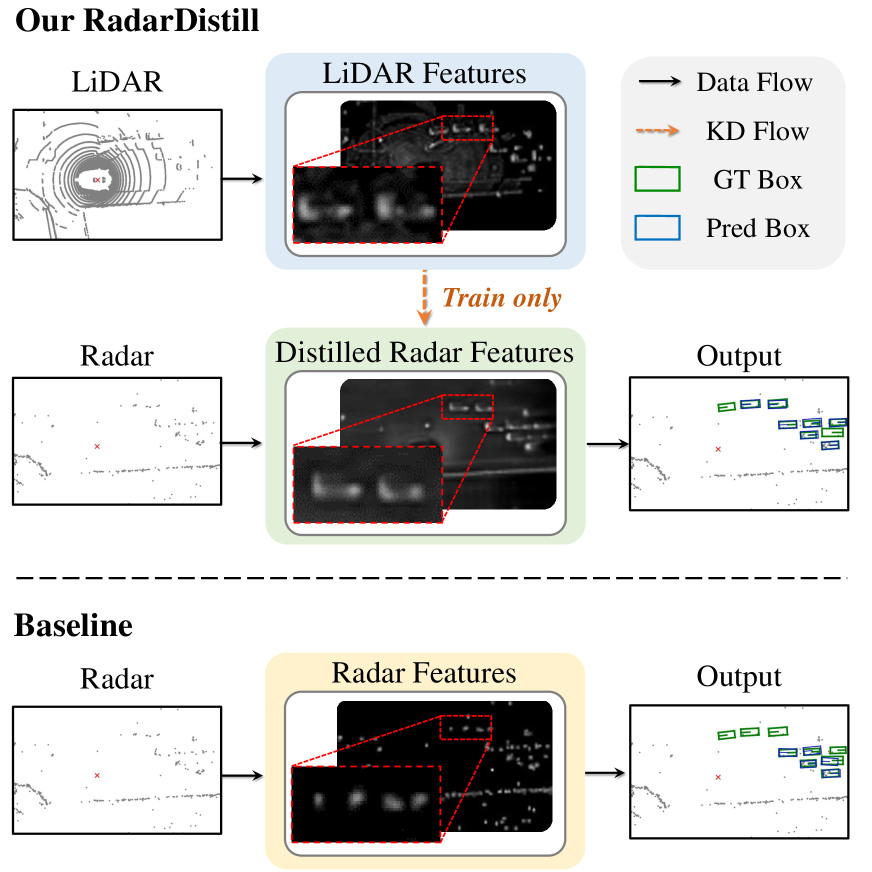
RadarDistill: Boosting Radar-based Object Detection Performance via Knowledge Distillation from LiDAR Features
Geonho Bang, Kwangjin Choi, Jisong Kim, Dongsuk Kum, Jun Won Choi
The inherent noisy and sparse characteristics of radar data pose challenges in finding effective representations for 3D object detection. In this paper, we propose RadarDistill, a novel knowledge distillation (KD) method, which can improve the representation of radar data by leveraging LiDAR data. RadarDistill successfully transfers desirable characteristics of LiDAR features into radar features using three key components: Cross-Modality Alignment (CMA), Activation-based Feature Distillation (AFD), and Proposal-based Feature Distillation (PFD). CMA enhances the density of radar features by employing multiple layers of dilation operations, effectively addressing the challenge of inefficient knowledge transfer from LiDAR to radar. AFD selectively transfers knowledge based on regions of the LiDAR features, with a specific focus on areas where activation intensity exceeds a predefined threshold. PFD similarly guides the radar network to selectively mimic features from the LiDAR network within the object proposals. Our comparative analyses conducted on the nuScenes datasets demonstrate that RadarDistill achieves state-of-the-art (SOTA) performance for radar-only object detection task, recording 20.5% in mAP and 43.7% in NDS. Also, RadarDistill significantly improves the performance of the camera-radar fusion model.
Read more4/8/2024

0
Domain-invariant Progressive Knowledge Distillation for UAV-based Object Detection
Liang Yao, Fan Liu, Chuanyi Zhang, Zhiquan Ou, Ting Wu
Knowledge distillation (KD) is an effective method for compressing models in object detection tasks. Due to limited computational capability, UAV-based object detection (UAV-OD) widely adopt the KD technique to obtain lightweight detectors. Existing methods often overlook the significant differences in feature space caused by the large gap in scale between the teacher and student models. This limitation hampers the efficiency of knowledge transfer during the distillation process. Furthermore, the complex backgrounds in UAV images make it challenging for the student model to efficiently learn the object features. In this paper, we propose a novel knowledge distillation framework for UAV-OD. Specifically, a progressive distillation approach is designed to alleviate the feature gap between teacher and student models. Then a new feature alignment method is provided to extract object-related features for enhancing student model's knowledge reception efficiency. Finally, extensive experiments are conducted to validate the effectiveness of our proposed approach. The results demonstrate that our proposed method achieves state-of-the-art (SoTA) performance in two UAV-OD datasets.
Read more8/22/2024