Modeling the Lane-Change Reactions to Merging Vehicles for Highway On-Ramp Simulations

0

Sign in to get full access
Overview
- This paper proposes a model for simulating the lane-change reactions of vehicles merging onto highway on-ramps.
- The goal is to improve the realism of traffic simulations, which can inform infrastructure design and autonomous vehicle algorithms.
- The model captures how drivers on the mainline highway respond to merging vehicles, including lane changes and speed adjustments.
Plain English Explanation
When vehicles try to merge onto a highway from an on-ramp, it can cause disruptions to the flow of traffic on the main highway. Drivers on the highway need to react to these merging vehicles, often by changing lanes or adjusting their speed. Modeling these reactions accurately is important for traffic simulation, which can help transportation planners design better highway infrastructure and inform the development of autonomous driving systems.
This paper presents a new model that aims to capture the typical behaviors of drivers on the highway when they encounter merging vehicles. The model predicts how drivers will respond, such as by changing lanes or slowing down, based on factors like the speed and position of the merging vehicle. By incorporating this type of realistic driver behavior, the researchers hope to create traffic simulations that more closely match real-world conditions.
Technical Explanation
The paper introduces a model for predicting lane-change reactions to merging vehicles on highway on-ramps. This builds on prior work in automated lane change behavior prediction and traffic modeling as next token prediction.
The proposed model has two main components:
- Lane Change Probability Model: This estimates the likelihood of a driver changing lanes in response to a merging vehicle, based on factors like the relative speed and position of the vehicles.
- Speed Adjustment Model: This predicts how drivers will modify their speed to accommodate the merging vehicle, such as slowing down or maintaining their current speed.
The authors evaluate their model using real-world highway traffic data and find that it can accurately reproduce observed driver behaviors during on-ramp merging situations. This suggests the model could be useful for predicting traffic congestion at urban intersections and motion planning for autonomous vehicles.
Critical Analysis
The paper provides a comprehensive model for simulating driver reactions to merging vehicles, which is an important aspect of realistic traffic simulations. However, the authors acknowledge some limitations:
- The model was developed and tested using data from a single highway location, so its generalizability to other roads or regions is unclear.
- The model does not account for interactions between multiple merging vehicles or complex traffic patterns involving weaving or lane closures.
- The study focused on discretionary lane changes (i.e. voluntary changes not required for safety), but mandatory lane changes in response to merging traffic may involve different decision-making processes.
These are areas that could be explored in future research to further improve the model's accuracy and applicability. Additionally, it would be valuable to see the model integrated into a full traffic simulation framework and evaluated on its ability to reproduce real-world traffic dynamics.
Conclusion
This paper presents a novel model for simulating how drivers on a highway mainline will react to merging vehicles from an on-ramp. By capturing these lane change and speed adjustment behaviors, the model can help create more realistic traffic simulations. These simulations can then inform the design of highway infrastructure and the development of autonomous driving algorithms that need to navigate complex merging scenarios. While the model has some limitations, it represents an important step forward in improving the fidelity of traffic modeling and simulation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Modeling the Lane-Change Reactions to Merging Vehicles for Highway On-Ramp Simulations
Dustin Holley, Jovin Dsa, Hossein Nourkhiz Mahjoub, Gibran Ali, Tyler Naes, Ehsan Moradi-Pari, Pawan Sai Kallepalli
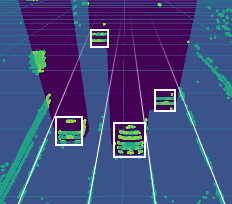
Enhancing simulation environments to replicate real-world driver behavior is essential for developing Autonomous Vehicle technology. While some previous works have studied the yielding reaction of lag vehicles in response to a merging car at highway on-ramps, the possible lane-change reaction of the lag car has not been widely studied. In this work we aim to improve the simulation of the highway merge scenario by including the lane-change reaction in addition to yielding behavior of main-lane lag vehicles, and we evaluate two different models for their ability to capture this reactive lane-change behavior. To tune the payoff functions of these models, a novel naturalistic dataset was collected on U.S. highways that provided several hours of merge-specific data to learn the lane change behavior of U.S. drivers. To make sure that we are collecting a representative set of different U.S. highway geometries in our data, we surveyed 50,000 U.S. highway on-ramps and then selected eight representative sites. The data were collected using roadside-mounted lidar sensors to capture various merge driver interactions. The models were demonstrated to be configurable for both keep-straight and lane-change behavior. The models were finally integrated into a high-fidelity simulation environment and confirmed to have adequate computation time efficiency for use in large-scale simulations to support autonomous vehicle development.
Read more7/29/2024

0
Reinforcement Learning with Latent State Inference for Autonomous On-ramp Merging under Observation Delay
Amin Tabrizian, Zhitong Huang, Peng Wei
This paper presents a novel approach to address the challenging problem of autonomous on-ramp merging, where a self-driving vehicle needs to seamlessly integrate into a flow of vehicles on a multi-lane highway. We introduce the Lane-keeping, Lane-changing with Latent-state Inference and Safety Controller (L3IS) agent, designed to perform the on-ramp merging task safely without comprehensive knowledge about surrounding vehicles' intents or driving styles. We also present an augmentation of this agent called AL3IS that accounts for observation delays, allowing the agent to make more robust decisions in real-world environments with vehicle-to-vehicle (V2V) communication delays. By modeling the unobservable aspects of the environment through latent states, such as other drivers' intents, our approach enhances the agent's ability to adapt to dynamic traffic conditions, optimize merging maneuvers, and ensure safe interactions with other vehicles. We demonstrate the effectiveness of our method through extensive simulations generated from real traffic data and compare its performance with existing approaches. L3IS shows a 99.90% success rate in a challenging on-ramp merging case generated from the real US Highway 101 data. We further perform a sensitivity analysis on AL3IS to evaluate its robustness against varying observation delays, which demonstrates an acceptable performance of 93.84% success rate in 1-second V2V communication delay.
Read more6/24/2024

0
AgentsCoMerge: Large Language Model Empowered Collaborative Decision Making for Ramp Merging
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang, Sam Kwong
Ramp merging is one of the bottlenecks in traffic systems, which commonly cause traffic congestion, accidents, and severe carbon emissions. In order to address this essential issue and enhance the safety and efficiency of connected and autonomous vehicles (CAVs) at multi-lane merging zones, we propose a novel collaborative decision-making framework, named AgentsCoMerge, to leverage large language models (LLMs). Specifically, we first design a scene observation and understanding module to allow an agent to capture the traffic environment. Then we propose a hierarchical planning module to enable the agent to make decisions and plan trajectories based on the observation and the agent's own state. In addition, in order to facilitate collaboration among multiple agents, we introduce a communication module to enable the surrounding agents to exchange necessary information and coordinate their actions. Finally, we develop a reinforcement reflection guided training paradigm to further enhance the decision-making capability of the framework. Extensive experiments are conducted to evaluate the performance of our proposed method, demonstrating its superior efficiency and effectiveness for multi-agent collaborative decision-making under various ramp merging scenarios.
Read more8/9/2024
0
A Two-Level Stochastic Model for the Lateral Movement of Vehicles Within Their Lane Under Homogeneous Traffic Conditions
Nicole Neis, Juergen Beyerer
The lateral position of vehicles within their lane is a decisive factor for the range of vision of vehicle sensors. This, in turn, is crucial for a vehicle's ability to perceive its environment and gain a high situational awareness by processing the collected information. When aiming for increasing levels of vehicle autonomy, this situational awareness becomes more and more important. Thus, when validating an autonomous driving function the representativeness of the submicroscopic behavior such as the lateral offset has to be ensured. With simulations being an essential part of the validation of autonomous driving functions, models describing these phenomena are required. Possible applications are the enhancement of microscopic traffic simulations and the maneuver-based approach for scenario-based testing. This paper presents a two-level stochastic approach to model the lateral movement of vehicles within their lane during road-following maneuvers under homogeneous traffic conditions. A Markov model generates the coarse lateral offset profile. It is superposed with a noise model for the fine movements. Both models are set up using real-world data. The evaluation of the model shows promising qualitative and quantitative results, the potential for enhancements and extreme low computation times (10000 times faster than real time).
Read more5/28/2024