A Two-Level Stochastic Model for the Lateral Movement of Vehicles Within Their Lane Under Homogeneous Traffic Conditions

0
Sign in to get full access
Overview
- This paper presents a two-level stochastic model for describing the lateral movement of vehicles within their lane under homogeneous traffic conditions.
- The model accounts for both the driver's steering behavior and the vehicle dynamics, capturing the complex interactions between them.
- The proposed approach aims to provide a more realistic representation of vehicle lateral motion compared to existing models.
Plain English Explanation
The paper describes a new way to model how vehicles move side-to-side within their lane on the road. The model has two main parts:
- It captures the driver's steering behavior - how the driver turns the steering wheel to move the vehicle.
- It also models the actual vehicle dynamics - how the vehicle responds to the driver's inputs and moves laterally.
By combining these two aspects, the model aims to provide a more realistic and accurate representation of how vehicles actually move within their lane, rather than using simpler, existing models. This could be useful for applications like autonomous vehicle decision and control through reinforcement learning or Bayesian simultaneous localization and multi-lane tracking.
The key idea is to capture the complex interactions between the driver's steering inputs and the vehicle's lateral motion, rather than treating them separately. This can help create more realistic simulations and models of vehicle behavior on the road.
Technical Explanation
The paper proposes a two-level stochastic model to describe the lateral movement of vehicles within their lane. The first level models the driver's steering behavior as a stochastic process, accounting for factors like driver attention, road conditions, and vehicle dynamics.
The second level models the vehicle's lateral dynamics in response to the driver's steering inputs. This includes the vehicle's speed, acceleration, and lateral position within the lane. The model treats these vehicle dynamics as a stochastic process as well, capturing the inherent variability and uncertainty.
By combining these two stochastic processes, the model aims to provide a more realistic representation of how vehicles move side-to-side compared to existing approaches, such as nonlinear model predictive control for automated drifting or modeling lane change reactions to merging vehicles.
The paper also describes techniques for calibrating and validating the model parameters using experimental data, ensuring the model captures real-world vehicle behavior.
Critical Analysis
The paper presents a comprehensive and well-designed approach to modeling vehicle lateral motion. However, the authors acknowledge several limitations and areas for further research:
- The model is developed for homogeneous traffic conditions, and its applicability to more complex, heterogeneous traffic scenarios is not yet explored.
- The model assumes the driver's steering behavior follows a stochastic process, but the underlying cognitive and behavioral factors influencing this process are not fully investigated.
- The experimental validation is conducted on a limited set of test scenarios, and the model's performance under a wider range of driving conditions and maneuvers is yet to be assessed.
Additionally, the paper does not address potential challenges in implementing this model in real-world neural L1 adaptive control for vehicle lateral dynamics or other practical applications. Further research could explore these aspects to strengthen the model's utility and applicability.
Conclusion
This paper presents a novel two-level stochastic model for describing the lateral movement of vehicles within their lane under homogeneous traffic conditions. By combining the driver's steering behavior and the vehicle's lateral dynamics, the model offers a more realistic representation of vehicle lateral motion compared to existing approaches.
The technical details and validation of the model suggest it could be a valuable tool for applications such as autonomous vehicle control, traffic simulation, and driver assistance systems. However, further research is needed to explore the model's performance in more complex traffic scenarios and address potential implementation challenges.
Overall, this research contributes to the ongoing efforts to accurately model and understand vehicle behavior, which is essential for developing safer and more efficient transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Two-Level Stochastic Model for the Lateral Movement of Vehicles Within Their Lane Under Homogeneous Traffic Conditions
Nicole Neis, Juergen Beyerer
The lateral position of vehicles within their lane is a decisive factor for the range of vision of vehicle sensors. This, in turn, is crucial for a vehicle's ability to perceive its environment and gain a high situational awareness by processing the collected information. When aiming for increasing levels of vehicle autonomy, this situational awareness becomes more and more important. Thus, when validating an autonomous driving function the representativeness of the submicroscopic behavior such as the lateral offset has to be ensured. With simulations being an essential part of the validation of autonomous driving functions, models describing these phenomena are required. Possible applications are the enhancement of microscopic traffic simulations and the maneuver-based approach for scenario-based testing. This paper presents a two-level stochastic approach to model the lateral movement of vehicles within their lane during road-following maneuvers under homogeneous traffic conditions. A Markov model generates the coarse lateral offset profile. It is superposed with a noise model for the fine movements. Both models are set up using real-world data. The evaluation of the model shows promising qualitative and quantitative results, the potential for enhancements and extreme low computation times (10000 times faster than real time).
Read more5/28/2024
0
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
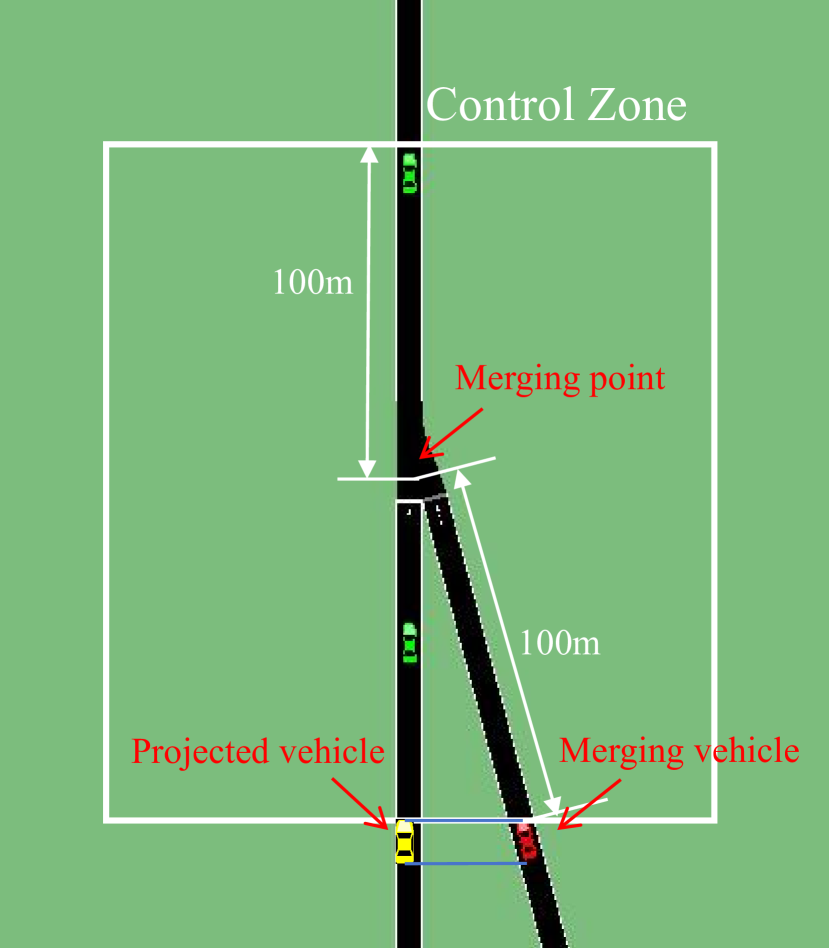
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
Read more4/22/2024

0
Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Michael Khalfin, Jack Volgren, Matthew Jones, Luke LeGoullon, Joshua Siegel, Chan-Jin Chung
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Read more6/12/2024
0
A Sim-to-Real Vision-based Lane Keeping System for a 1:10-scale Autonomous Vehicle
Antonio Gallina, Matteo Grandin, Angelo Cenedese, Mattia Bruschetta
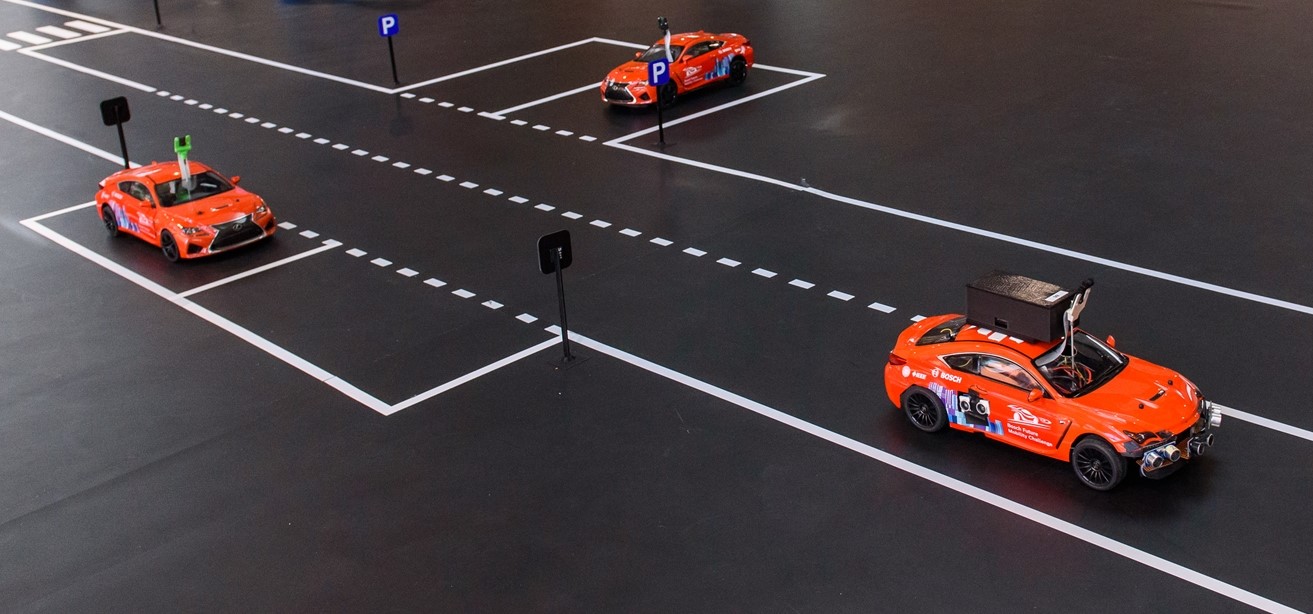
In recent years, several competitions have highlighted the need to investigate vision-based solutions to address scenarios with functional insufficiencies in perception, world modeling and localization. This article presents the Vision-based Lane Keeping System (VbLKS) developed by the DEI-Unipd Team within the context of the Bosch Future Mobility Challenge 2022. The main contribution lies in a Simulation-to-Reality (Sim2Real) GPS-denied VbLKS for a 1:10-scale autonomous vehicle. In this VbLKS, the input to a tailored Pure Pursuit (PP) based control strategy, namely the Lookahead Heading Error (LHE), is estimated at a constant lookahead distance employing a Convolutional Neural Network (CNN). A training strategy for a compact CNN is proposed, emphasizing data generation and augmentation on simulated camera images from a 3D Gazebo simulator, and enabling real-time operation on low-level hardware. A tailored PP-based lateral controller equipped with a derivative action and a PP-based velocity reference generation are implemented. Tuning ranges are established through a systematic time-delay stability analysis. Validation in a representative controlled laboratory setting is provided.
Read more9/27/2024