MonoDETRNext: Next-generation Accurate and Efficient Monocular 3D Object Detection Method

0

Sign in to get full access
Overview
- MonoDETRNext is a new monocular 3D object detection method that aims to be more accurate and efficient than previous approaches.
- It builds upon the DETR architecture, which uses a transformer-based approach to object detection, and applies it to the monocular 3D detection task.
- The key innovations include a novel depth-aware positional encoding and a depth-aware query encoding that help the model better reason about 3D object properties from a single image.
Plain English Explanation
MonoDETRNext: Next-generation Accurate and Efficient Monocular 3D Object Detection Method is a new computer vision technique that can detect and locate 3D objects in a single camera image. This is a challenging task, as depth information is not directly available in a 2D image.
The key innovation in MonoDETRNext is the use of a "transformer" neural network architecture, which allows the model to better reason about the 3D properties of objects, such as their size, orientation, and location in the scene. Specifically, the researchers developed new ways of encoding depth information into the model's feature representations, which helps it understand the 3D nature of the objects it is detecting.
Compared to previous monocular 3D detection methods, MonoDETRNext is able to achieve higher accuracy while also being more efficient to run. This makes it a promising approach for real-world applications like autonomous vehicles, where both accuracy and speed are important.
The MonodTAKD and MonoMAE methods have also explored ways to improve monocular 3D detection by incorporating depth information, but MonoDETRNext represents a significant leap forward in terms of both accuracy and efficiency.
Technical Explanation
MonoDETRNext builds on the DETR architecture, which uses a transformer-based approach to object detection. The key innovations include:
- Depth-Aware Positional Encoding: The researchers developed a new way of encoding the 3D position of objects in the image, which helps the model better reason about their 3D properties.
- Depth-Aware Query Encoding: Similarly, the model's query embeddings, which represent the objects it is trying to detect, are also encoded with depth information to improve 3D reasoning.
- Efficient Transformer Architecture: The overall transformer-based architecture is designed to be more efficient than previous monocular 3D detection methods, allowing for faster inference speeds.
The researchers evaluated MonoDETRNext on several standard 3D object detection benchmarks, and showed that it outperforms previous state-of-the-art monocular methods in both accuracy and efficiency.
Critical Analysis
The researchers acknowledge that MonoDETRNext, like other monocular 3D detection methods, has limitations in its ability to accurately estimate the full 3D properties of objects compared to methods that use additional sensors like LiDAR. The UniMode paper has also explored ways to combine monocular and multi-sensor data for improved 3D detection.
Additionally, the paper does not provide a detailed analysis of the model's failure cases or potential biases. Further research could investigate these aspects to better understand the strengths and weaknesses of the approach.
Overall, MonoDETRNext represents an important step forward in monocular 3D object detection, and the researchers' innovations in depth-aware encoding and efficient transformer architectures are likely to inspire further advancements in this rapidly evolving field.
Conclusion
MonoDETRNext is a new monocular 3D object detection method that achieves state-of-the-art accuracy and efficiency by leveraging a transformer-based architecture and novel depth-aware encoding techniques. While monocular 3D detection still has limitations compared to multi-sensor approaches, MonoDETRNext demonstrates the potential for single-camera systems to perform this task with high performance.
The researchers' innovations in depth-aware modeling and efficient transformer design are likely to have broader impacts beyond just 3D object detection, and could be applied to other computer vision and spatial reasoning tasks. As the field of autonomous perception continues to evolve, methods like MonoDETRNext will play an important role in enabling a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
MonoDETRNext: Next-generation Accurate and Efficient Monocular 3D Object Detection Method
Pan Liao, Feng Yang, Di Wu, Liu Bo
Monocular vision-based 3D object detection is crucial in various sectors, yet existing methods face significant challenges in terms of accuracy and computational efficiency. Building on the successful strategies in 2D detection and depth estimation, we propose MonoDETRNext, which seeks to optimally balance precision and processing speed. Our methodology includes the development of an efficient hybrid visual encoder, enhancement of depth prediction mechanisms, and introduction of an innovative query generation strategy, augmented by an advanced depth predictor. Building on MonoDETR, MonoDETRNext introduces two variants: MonoDETRNext-F, which emphasizes speed, and MonoDETRNext-A, which focuses on precision. We posit that MonoDETRNext establishes a new benchmark in monocular 3D object detection and opens avenues for future research. We conducted an exhaustive evaluation demonstrating the model's superior performance against existing solutions. Notably, MonoDETRNext-A demonstrated a 4.60% improvement in the AP3D metric on the KITTI test benchmark over MonoDETR, while MonoDETRNext-F showed a 2.21% increase. Additionally, the computational efficiency of MonoDETRNext-F slightly exceeds that of its predecessor.
Read more5/27/2024
0
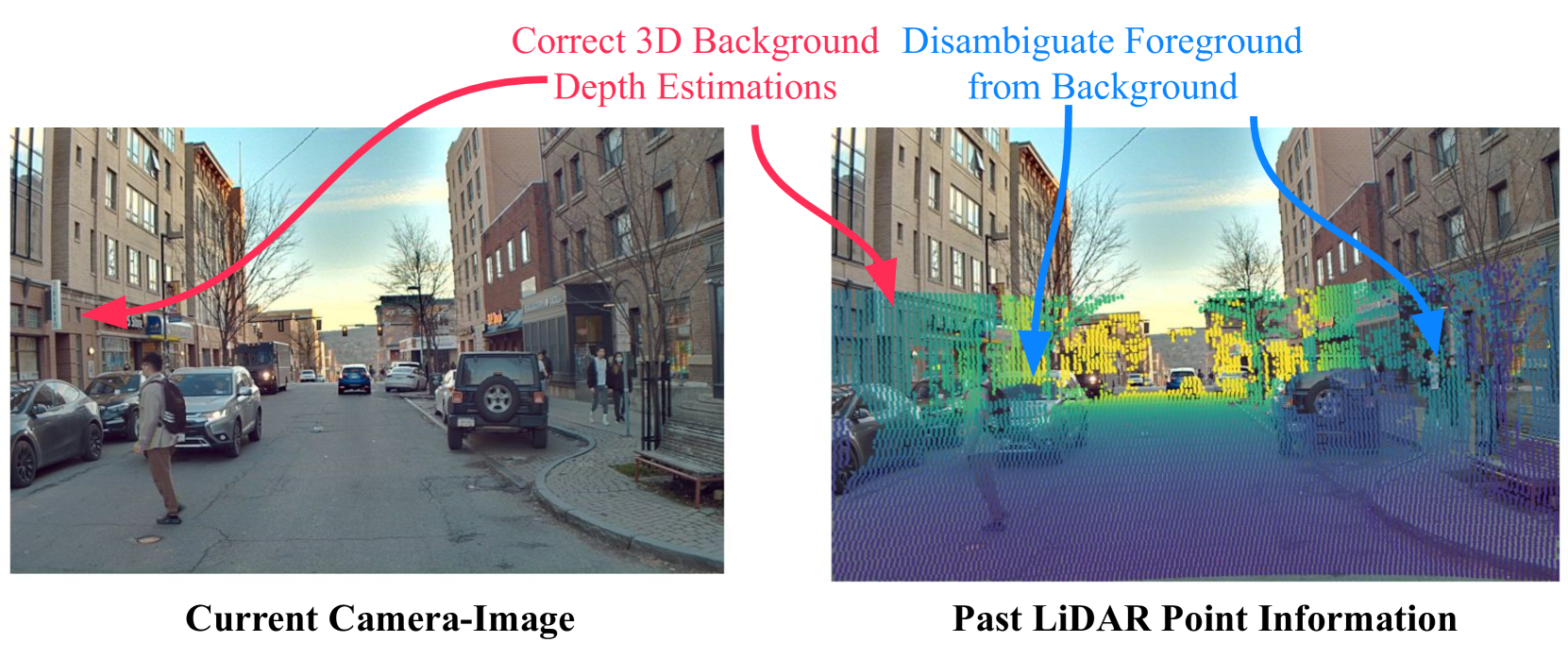
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
Read more4/11/2024

0
Fully Test-Time Adaptation for Monocular 3D Object Detection
Hongbin Lin, Yifan Zhang, Shuaicheng Niu, Shuguang Cui, Zhen Li
Monocular 3D object detection (Mono 3Det) aims to identify 3D objects from a single RGB image. However, existing methods often assume training and test data follow the same distribution, which may not hold in real-world test scenarios. To address the out-of-distribution (OOD) problems, we explore a new adaptation paradigm for Mono 3Det, termed Fully Test-time Adaptation. It aims to adapt a well-trained model to unlabeled test data by handling potential data distribution shifts at test time without access to training data and test labels. However, applying this paradigm in Mono 3Det poses significant challenges due to OOD test data causing a remarkable decline in object detection scores. This decline conflicts with the pre-defined score thresholds of existing detection methods, leading to severe object omissions (i.e., rare positive detections and many false negatives). Consequently, the limited positive detection and plenty of noisy predictions cause test-time adaptation to fail in Mono 3Det. To handle this problem, we propose a novel Monocular Test-Time Adaptation (MonoTTA) method, based on two new strategies. 1) Reliability-driven adaptation: we empirically find that high-score objects are still reliable and the optimization of high-score objects can enhance confidence across all detections. Thus, we devise a self-adaptive strategy to identify reliable objects for model adaptation, which discovers potential objects and alleviates omissions. 2) Noise-guard adaptation: since high-score objects may be scarce, we develop a negative regularization term to exploit the numerous low-score objects via negative learning, preventing overfitting to noise and trivial solutions. Experimental results show that MonoTTA brings significant performance gains for Mono 3Det models in OOD test scenarios, approximately 190% gains by average on KITTI and 198% gains on nuScenes.
Read more5/31/2024

0
MonoMM: A Multi-scale Mamba-Enhanced Network for Real-time Monocular 3D Object Detection
Youjia Fu, Zihao Xu, Junsong Fu, Huixia Xue, Shuqiu Tan, Lei Li
Recent advancements in transformer-based monocular 3D object detection techniques have exhibited exceptional performance in inferring 3D attributes from single 2D images. However, most existing methods rely on resource-intensive transformer architectures, which often lead to significant drops in computational efficiency and performance when handling long sequence data. To address these challenges and advance monocular 3D object detection technology, we propose an innovative network architecture, MonoMM, a Multi-scale textbf{M}amba-Enhanced network for real-time Monocular 3D object detection. This well-designed architecture primarily includes the following two core modules: Focused Multi-Scale Fusion (FMF) Module, which focuses on effectively preserving and fusing image information from different scales with lower computational resource consumption. By precisely regulating the information flow, the FMF module enhances the model adaptability and robustness to scale variations while maintaining image details. Depth-Aware Feature Enhancement Mamba (DMB) Module: It utilizes the fused features from image characteristics as input and employs a novel adaptive strategy to globally integrate depth information and visual information. This depth fusion strategy not only improves the accuracy of depth estimation but also enhances the model performance under different viewing angles and environmental conditions. Moreover, the modular design of MonoMM provides high flexibility and scalability, facilitating adjustments and optimizations according to specific application needs. Extensive experiments conducted on the KITTI dataset show that our method outperforms previous monocular methods and achieves real-time detection.
Read more8/2/2024