A multi-robot system for the detection of explosive devices
2404.14167
0
0

Abstract
In order to clear the world of the threat posed by landmines and other explosive devices, robotic systems can play an important role. However, the development of such field robots that need to operate in hazardous conditions requires the careful consideration of multiple aspects related to the perception, mobility, and collaboration capabilities of the system. In the framework of a European challenge, the Artificial Intelligence for Detection of Explosive Devices - eXtended (AIDEDeX) project proposes to design a heterogeneous multi-robot system with advanced sensor fusion algorithms. This system is specifically designed to detect and classify improvised explosive devices, explosive ordnances, and landmines. This project integrates specialised sensors, including electromagnetic induction, ground penetrating radar, X-Ray backscatter imaging, Raman spectrometers, and multimodal cameras, to achieve comprehensive threat identification and localisation. The proposed system comprises a fleet of unmanned ground vehicles and unmanned aerial vehicles. This article details the operational phases of the AIDEDeX system, from rapid terrain exploration using unmanned aerial vehicles to specialised detection and classification by unmanned ground vehicles equipped with a robotic manipulator. Initially focusing on a centralised approach, the project will also explore the potential of a decentralised control architecture, taking inspiration from swarm robotics to provide a robust, adaptable, and scalable solution for explosive detection.
Create account to get full access
Overview
- This paper presents a multi-robot system for the detection of explosive devices in hazardous environments.
- The system uses a team of robots to collaboratively search for and identify potential explosive threats.
- The researchers address key challenges in multi-robot coordination, sensing, and decision-making for this critical application.
Plain English Explanation
The paper describes a system that uses a group of robots to search for and detect explosive devices in dangerous areas. Instead of relying on a single robot, the researchers developed a way for multiple robots to work together to improve the chances of finding explosives and reduce the risks to human operators.
The key idea is to have a team of robots coordinate their movements and share information to cover more ground and make better decisions about where potential threats might be located. This distributed approach allows the system to be more robust and adaptable than a single robot operating alone.
The robots use various sensors, like cameras and chemical detectors, to inspect the environment and identify potential explosives. They then communicate this information to the other robots and a central control system to build a comprehensive understanding of the situation. This allows the system to make informed decisions about how best to proceed and minimize risks.
Overall, the goal of this research is to develop a semi-autonomous robotic system that can assist human operators in safely and effectively detecting explosive threats in hazardous environments.
Technical Explanation
The researchers present a multi-robot system for the detection of explosive devices in risky environments. The system is composed of a team of mobile robots equipped with a variety of sensors, including cameras, chemical detectors, and other specialized instruments.
The robots coordinate their movements and share information using distributed communication and decision-making algorithms. This allows the team to efficiently cover a larger area, gather more comprehensive data, and make more informed decisions about potential threats.
The robots use their sensors to inspect the environment and detect the presence of explosive materials or suspicious objects. When a potential threat is identified, the robots communicate this information to a central control system, which then directs the team's response.
The researchers also develop advanced control and navigation algorithms to enable the robots to maneuver safely and effectively in hazardous environments, avoiding obstacles and navigating to target locations.
Through experiments and simulations, the researchers demonstrate the effectiveness of their multi-robot system in detecting and localizing explosive devices, highlighting its potential to enhance the safety and efficiency of operations in high-risk areas.
Critical Analysis
The paper presents a compelling approach to the challenging problem of detecting explosive devices in hazardous environments. The use of a multi-robot system is a promising solution, as it can leverage the combined capabilities of multiple agents to improve coverage, sensing, and decision-making.
However, the researchers acknowledge several limitations and areas for further research. For example, the system's performance may be affected by factors such as sensor reliability, communication reliability, and the complexity of the environment. Additional work may be needed to enhance the robustness and adaptability of the system to handle a wider range of conditions and challenges.
Furthermore, the ethical and societal implications of deploying such a system in real-world scenarios should be carefully considered. Issues related to privacy, autonomy, and the potential for misuse or unintended consequences would need to be thoroughly explored and addressed.
Despite these caveats, the proposed multi-robot system represents an important step forward in the development of advanced robotic solutions for hazardous environments. The researchers' approach to distributed sensing, communication, and decision-making could have broader applications in fields such as search and rescue, disaster response, and critical infrastructure inspection.
Conclusion
The paper presents a novel multi-robot system for the detection of explosive devices in hazardous environments. By leveraging the coordinated efforts of a team of robots, the system can efficiently cover a larger area, gather more comprehensive data, and make more informed decisions about potential threats.
The researchers have demonstrated the feasibility and potential effectiveness of their approach through experiments and simulations. While there are still challenges and limitations to address, this work represents an important contribution to the field of robotics for hazardous applications.
As the technology continues to evolve, the deployment of such multi-robot systems could significantly enhance the safety and efficiency of operations in high-risk areas, ultimately leading to improved outcomes for both human operators and the communities they serve.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

AI-Assisted Detector Design for the EIC (AID(2)E)
M. Diefenthaler (AID), C. Fanelli (AID), L. O. Gerlach (AID), W. Guan (AID), T. Horn (AID), A. Jentsch (AID), M. Lin (AID), K. Nagai (AID), H. Nayak (AID), C. Pecar (AID), K. Suresh (AID), A. Vossen (AID), T. Wang (AID), T. Wenaus (AID)
0
0
Artificial Intelligence is poised to transform the design of complex, large-scale detectors like the ePIC at the future Electron Ion Collider. Featuring a central detector with additional detecting systems in the far forward and far backward regions, the ePIC experiment incorporates numerous design parameters and objectives, including performance, physics reach, and cost, constrained by mechanical and geometric limits. This project aims to develop a scalable, distributed AI-assisted detector design for the EIC (AID(2)E), employing state-of-the-art multiobjective optimization to tackle complex designs. Supported by the ePIC software stack and using Geant4 simulations, our approach benefits from transparent parameterization and advanced AI features. The workflow leverages the PanDA and iDDS systems, used in major experiments such as ATLAS at CERN LHC, the Rubin Observatory, and sPHENIX at RHIC, to manage the compute intensive demands of ePIC detector simulations. Tailored enhancements to the PanDA system focus on usability, scalability, automation, and monitoring. Ultimately, this project aims to establish a robust design capability, apply a distributed AI-assisted workflow to the ePIC detector, and extend its applications to the design of the second detector (Detector-2) in the EIC, as well as to calibration and alignment tasks. Additionally, we are developing advanced data science tools to efficiently navigate the complex, multidimensional trade-offs identified through this optimization process.
5/29/2024

Immersive Rover Control and Obstacle Detection based on Extended Reality and Artificial Intelligence
Sof'ia Coloma, Alexandre Frantz, Dave van der Meer, Ernest Skrzypczyk, Andrej Orsula, Miguel Olivares-Mendez
0
0
Lunar exploration has become a key focus, driving scientific and technological advances. Ongoing missions are deploying rovers to the surface of the Moon, targeting the far side and south pole. However, these terrains pose challenges, emphasizing the need for precise obstacles and resource detection to avoid mission risks. This work proposes a novel system that integrates eXtended Reality (XR) and Artificial Intelligence (AI) to teleoperate lunar rovers. It is capable of autonomously detecting rocks and recreating an immersive 3D virtual environment of the location of the robot. This system has been validated in a lunar laboratory to observe its advantages over traditional 2D-based teleoperation approaches
4/23/2024

Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Simon Schwaiger, Lucas Muster, Georg Novotny, Michael Schebek, Wilfried Wober, Stefan Thalhammer, Christoph Bohm
0
0
This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
6/21/2024
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
0
0
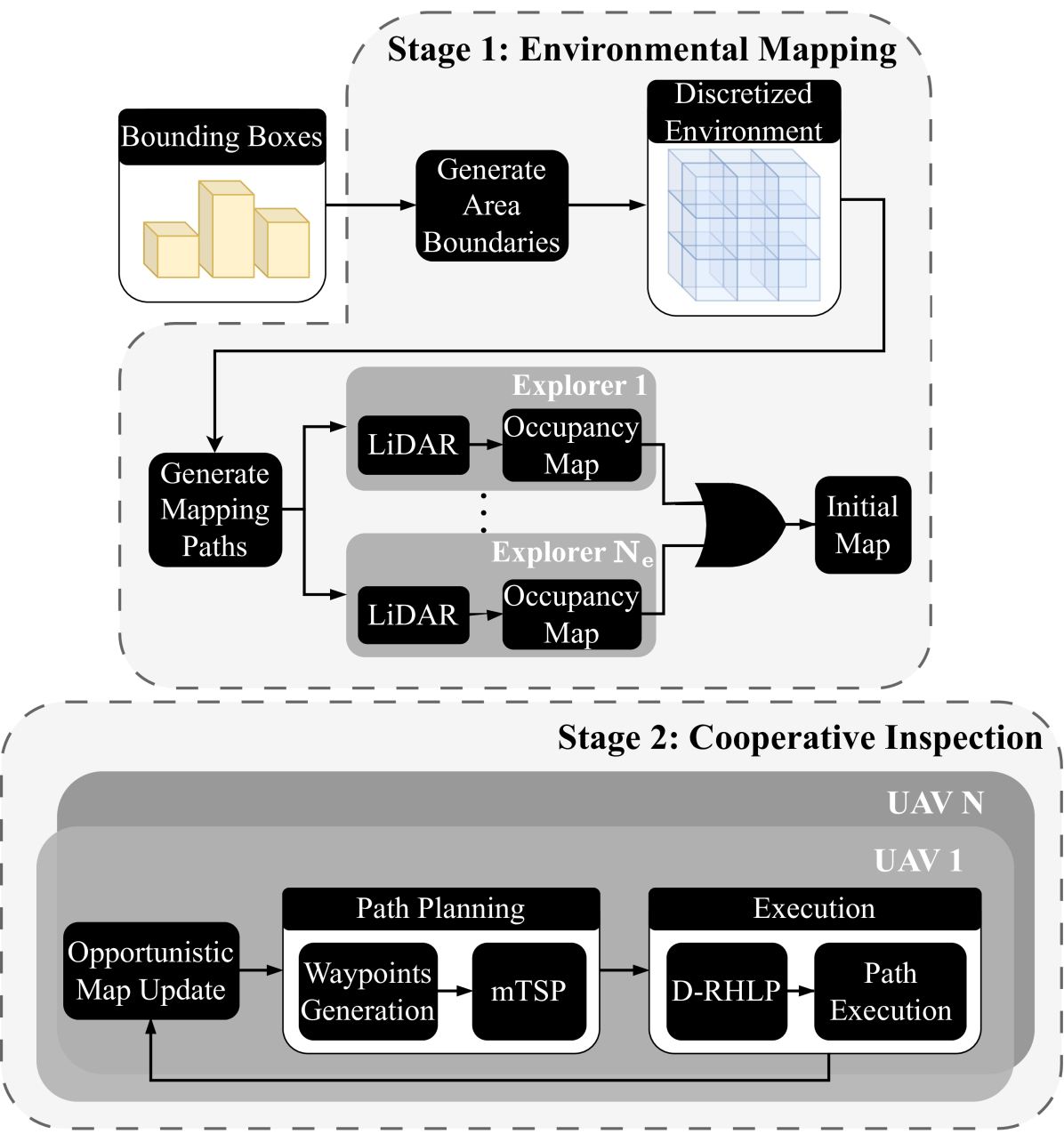
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
4/19/2024