SOMTP: Self-Supervised Learning-Based Optimizer for MPC-Based Safe Trajectory Planning Problems in Robotics

0

Sign in to get full access
Overview
- Self-Supervised Learning-Based Optimizer for MPC-Based Safe Trajectory Planning Problems in Robotics
- Presents a new approach to optimize model predictive control (MPC) for safe trajectory planning in dynamic environments
- Proposes a self-supervised learning algorithm to learn a differentiable approximation of the MPC problem, enabling efficient optimization
- Demonstrates improved safety and computation time compared to traditional MPC approaches on simulated robot navigation tasks
Plain English Explanation
This paper introduces a new method for robots to plan safe trajectories in dynamic environments. The key challenge is that traditional optimization-based planning approaches, like model predictive control (MPC), can be computationally expensive, making them difficult to use in real-time applications.
The researchers developed a self-supervised learning algorithm that can learn a differentiable approximation of the MPC problem. This allows them to efficiently optimize the trajectory planning using gradient-based methods, rather than the slower, iterative optimization process required for traditional MPC.
The approach demonstrated improved safety and computation time compared to standard MPC methods when tested on simulated robot navigation tasks. By using machine learning to streamline the optimization process, the researchers were able to create a planning system that is both computationally efficient and effective at keeping the robot safe as it navigates dynamic environments.
Technical Explanation
The core idea of the paper is to use self-supervised learning to create a differentiable approximation of the MPC optimization problem for safe trajectory planning. This allows the use of efficient gradient-based optimization techniques, rather than the iterative optimization required for traditional MPC approaches.
The authors first formulate the MPC-based safe trajectory planning problem as a constrained optimization task. They then propose a self-supervised learning algorithm to learn a differentiable surrogate model that can approximate the original MPC problem. This surrogate model is trained using sampled state-action pairs generated from the original MPC problem.
Once the surrogate model is learned, the authors can efficiently optimize the trajectory planning using gradient-based methods. This significantly reduces the computation time compared to traditional MPC, while still maintaining safety guarantees.
The method is evaluated on simulated robot navigation tasks in dynamic environments. The results show that the proposed approach outperforms standard MPC in terms of computation time and safety, measured by the number of collisions and constraint violations.
The authors also discuss connections to related work, such as optimal multilayered motion planning, chance-constrained planning, and combined task and motion planning.
Critical Analysis
The paper presents a novel and promising approach to address the computational challenges of MPC-based trajectory planning for robots operating in dynamic environments. The self-supervised learning component is a clever way to create a differentiable approximation of the original MPC problem, allowing for more efficient optimization.
However, the paper does not discuss the limitations of the learned surrogate model. It is possible that the approximation error could lead to suboptimal or even unsafe trajectories in certain scenarios. The authors should have included a more thorough analysis of the approximation quality and its impact on the overall safety and performance of the system.
Additionally, the evaluation is limited to simulated environments, and it would be valuable to see how the method performs on real-world robot platforms and in more complex, cluttered environments. The authors could also explore the potential to extend the approach to chance-constrained planning or other variants of the MPC problem.
Conclusion
This paper presents a novel self-supervised learning-based optimizer for MPC-based safe trajectory planning in dynamic environments. By learning a differentiable surrogate model of the MPC problem, the researchers were able to significantly improve the computational efficiency of the planning process while maintaining safety guarantees.
The results demonstrate the potential of this approach to enable more real-time, robust trajectory planning for robots operating in complex, changing environments. While the paper has some limitations in its evaluation, it serves as an important step forward in the field of robot motion planning and control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SOMTP: Self-Supervised Learning-Based Optimizer for MPC-Based Safe Trajectory Planning Problems in Robotics
Yifan Liu, You Wang, Guang Li
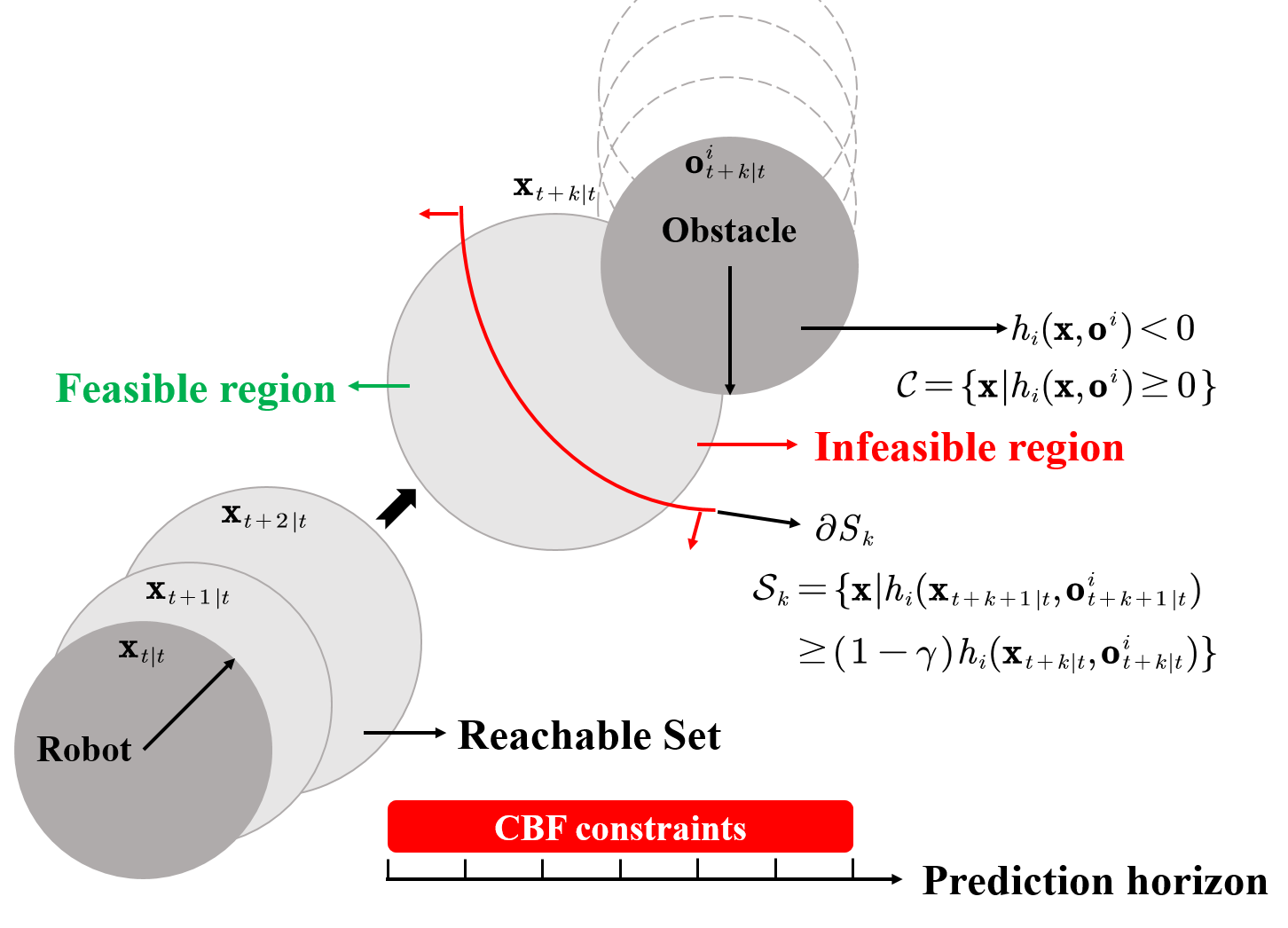
Model Predictive Control (MPC)-based trajectory planning has been widely used in robotics, and incorporating Control Barrier Function (CBF) constraints into MPC can greatly improve its obstacle avoidance efficiency. Unfortunately, traditional optimizers are resource-consuming and slow to solve such non-convex constrained optimization problems (COPs) while learning-based methods struggle to satisfy the non-convex constraints. In this paper, we propose SOMTP algorithm, a self-supervised learning-based optimizer for CBF-MPC trajectory planning. Specifically, first, SOMTP employs problem transcription to satisfy most of the constraints. Then the differentiable SLPG correction is proposed to move the solution closer to the safe set and is then converted as the guide policy in the following training process. After that, inspired by the Augmented Lagrangian Method (ALM), our training algorithm integrated with guide policy constraints is proposed to enable the optimizer network to converge to a feasible solution. Finally, experiments show that the proposed algorithm has better feasibility than other learning-based methods and can provide solutions much faster than traditional optimizers with similar optimality.
Read more5/16/2024

0
Faster Model Predictive Control via Self-Supervised Initialization Learning
Zhaoxin Li, Letian Chen, Rohan Paleja, Subramanya Nageshrao, Matthew Gombolay
Optimization for robot control tasks, spanning various methodologies, includes Model Predictive Control (MPC). However, the complexity of the system, such as non-convex and non-differentiable cost functions and prolonged planning horizons often drastically increases the computation time, limiting MPC's real-world applicability. Prior works in speeding up the optimization have limitations on solving convex problem and generalizing to hold out domains. To overcome this challenge, we develop a novel framework aiming at expediting optimization processes. In our framework, we combine offline self-supervised learning and online fine-tuning through reinforcement learning to improve the control performance and reduce optimization time. We demonstrate the effectiveness of our method on a novel, challenging Formula-1-track driving task, achieving 3.9% higher performance in optimization time and 3.6% higher performance in tracking accuracy on challenging holdout tracks.
Read more8/9/2024
0
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024
🛸
0
Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach
Jinhao Liu, Jun Yang, Jianliang Mao, Tianqi Zhu, Qihang Xie, Yimeng Li, Xiangyu Wang, Shihua Li
A flexible active safety motion (FASM) control approach is proposed for the avoidance of dynamic obstacles and the reference tracking in robot manipulators. The distinctive feature of the proposed method lies in its utilization of control barrier functions (CBF) to design flexible CBF-guided safety criteria (CBFSC) with dynamically optimized decay rates, thereby offering flexibility and active safety for robot manipulators in dynamic environments. First, discrete-time CBFs are employed to formulate the novel flexible CBFSC with dynamic decay rates for robot manipulators. Following that, the model predictive control (MPC) philosophy is applied, integrating flexible CBFSC as safety constraints into the receding-horizon optimization problem. Significantly, the decay rates of the designed CBFSC are incorporated as decision variables in the optimization problem, facilitating the dynamic enhancement of flexibility during the obstacle avoidance process. In particular, a novel cost function that integrates a penalty term is designed to dynamically adjust the safety margins of the CBFSC. Finally, experiments are conducted in various scenarios using a Universal Robots 5 (UR5) manipulator to validate the effectiveness of the proposed approach.
Read more5/22/2024