Person Transfer in the Field: Examining Real World Sequential Human-Robot Interaction Between Two Robots

0

Sign in to get full access
Overview
- This paper examines the real-world interactions between two robots as they transfer a person from one to the other in a public setting.
- The researchers studied the sequential interactions that occur when robots hand off a person to each other, providing insights into the challenges and dynamics of this process.
- The findings could inform the design of more seamless and effective human-robot handover scenarios in public spaces.
Plain English Explanation
In this study, the researchers looked at how two robots interact with each other and with people when they need to transfer a person from one robot to the other. This kind of "handover" scenario can happen in public spaces where robots are used, like in a hospital or an airport.
The researchers wanted to understand the challenges and dynamics that come up when robots have to pass a person from one to the other. This is an important task for robots that need to work together to assist people, but it can be tricky to do smoothly and safely.
By observing these real-world interactions, the researchers hope to provide insights that can help design better robot systems for transferring people. This could lead to more seamless and effective handovers between robots in public spaces, making the experience more comfortable and natural for the people involved.
Technical Explanation
The paper presents a study of sequential human-robot interaction in real-world settings, focusing specifically on the transfer of a person from one robot to another.
The researchers conducted field experiments where two robots were tasked with handing off a person to each other. They analyzed the various steps and challenges involved in this contact-guided robot-to-human object handover process, drawing insights from observing how people respond to and interact with the robots.
The findings reveal the importance of anticipating and planning for human behaviors to enable smooth and safe human-cobot collaborations during person transfer tasks. The researchers highlight key challenges, such as maintaining physical contact, coordinating the robots' movements, and managing human expectations and comfort levels.
Critical Analysis
The paper provides valuable real-world insights into the challenges of person transfer between robots, an important capability for robots operating in public spaces. However, the study is limited in scope, focusing only on a single handover scenario and a small number of trials.
Further research is needed to explore a wider range of person transfer scenarios, including varying environmental conditions, human preferences, and robot capabilities. Additionally, the paper does not delve deeply into potential safety concerns or ethical implications of robots handling people in public settings.
While the findings can inform the design of more seamless human-robot handovers, it will be crucial to address broader issues of trust, privacy, and user acceptance as this technology becomes more prevalent in public spaces.
Conclusion
This paper offers a detailed examination of the sequential interactions that occur when two robots need to transfer a person from one to the other in a real-world setting. The insights gained can help guide the development of more effective and user-friendly robot systems for assisting people in public spaces.
By understanding the challenges and dynamics of person transfer, robot designers can work to create handover processes that are smooth, safe, and comfortable for the humans involved. This research represents an important step towards enabling more natural and collaborative interactions between robots and people in the field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Person Transfer in the Field: Examining Real World Sequential Human-Robot Interaction Between Two Robots
Xiang Zhi Tan, Elizabeth J. Carter, Aaron Steinfeld
With more robots being deployed in the world, users will likely interact with multiple robots sequentially when receiving services. In this paper, we describe an exploratory field study in which unsuspecting participants experienced a ``person transfer'' -- a scenario in which they first interacted with one stationary robot before another mobile robot joined to complete the interaction. In our 7-hour study spanning 4 days, we recorded 18 instances of person transfers with 40+ individuals. We also interviewed 11 participants after the interaction to further understand their experience. We used the recorded video and interview data to extract interesting insights about in-the-field sequential human-robot interaction, such as mobile robot handovers, trust in person transfer, and the importance of the robots' positions. Our findings expose pitfalls and present important factors to consider when designing sequential human-robot interaction.
Read more6/12/2024

0
Slow waltzing with REEM-C: a physical-social human-robot interaction study of robot-to-human communication
Marie Charbonneau, Francisco Javier Andrade Chavez, Katja Mombaur
Humans often work closely together and relay a wealth of information through physical interaction. Robots, on the other hand, have not yet been developed to work similarly closely with humans, and to effectively convey information when engaging in physical human-robot interaction (pHRI). This currently limits the potential of physical human-robot collaboration to solve real-world problems. This paper investigates the question of how to establish clear and intuitive robot-to-human communication, while ensuring human comfort during pHRI. We approach this question from the perspective of a leader-follower scenario, in which a full-body humanoid robot leads a slow waltz dance by signaling the next steps to a human partner. This is achieved through the development of a whole-body control framework combining admittance and impedance control, which allows for different communication modalities including haptic, visual, and audio signals. Participant experiments allowed to validate the performance of the controller, and to understand what types of communication work better in terms of effectiveness and comfort during robot-led pHRI.
Read more8/13/2024
🌐
0
Field Notes on Deploying Research Robots in Public Spaces
Fanjun Bu, Alexandra Bremers, Mark Colley, Wendy Ju
Human-robot interaction requires to be studied in the wild. In the summers of 2022 and 2023, we deployed two trash barrel service robots through the wizard-of-oz protocol in public spaces to study human-robot interactions in urban settings. We deployed the robots at two different public plazas in downtown Manhattan and Brooklyn for a collective of 20 hours of field time. To date, relatively few long-term human-robot interaction studies have been conducted in shared public spaces. To support researchers aiming to fill this gap, we would like to share some of our insights and learned lessons that would benefit both researchers and practitioners on how to deploy robots in public spaces. We share best practices and lessons learned with the HRI research community to encourage more in-the-wild research of robots in public spaces and call for the community to share their lessons learned to a GitHub repository.
Read more4/30/2024
0
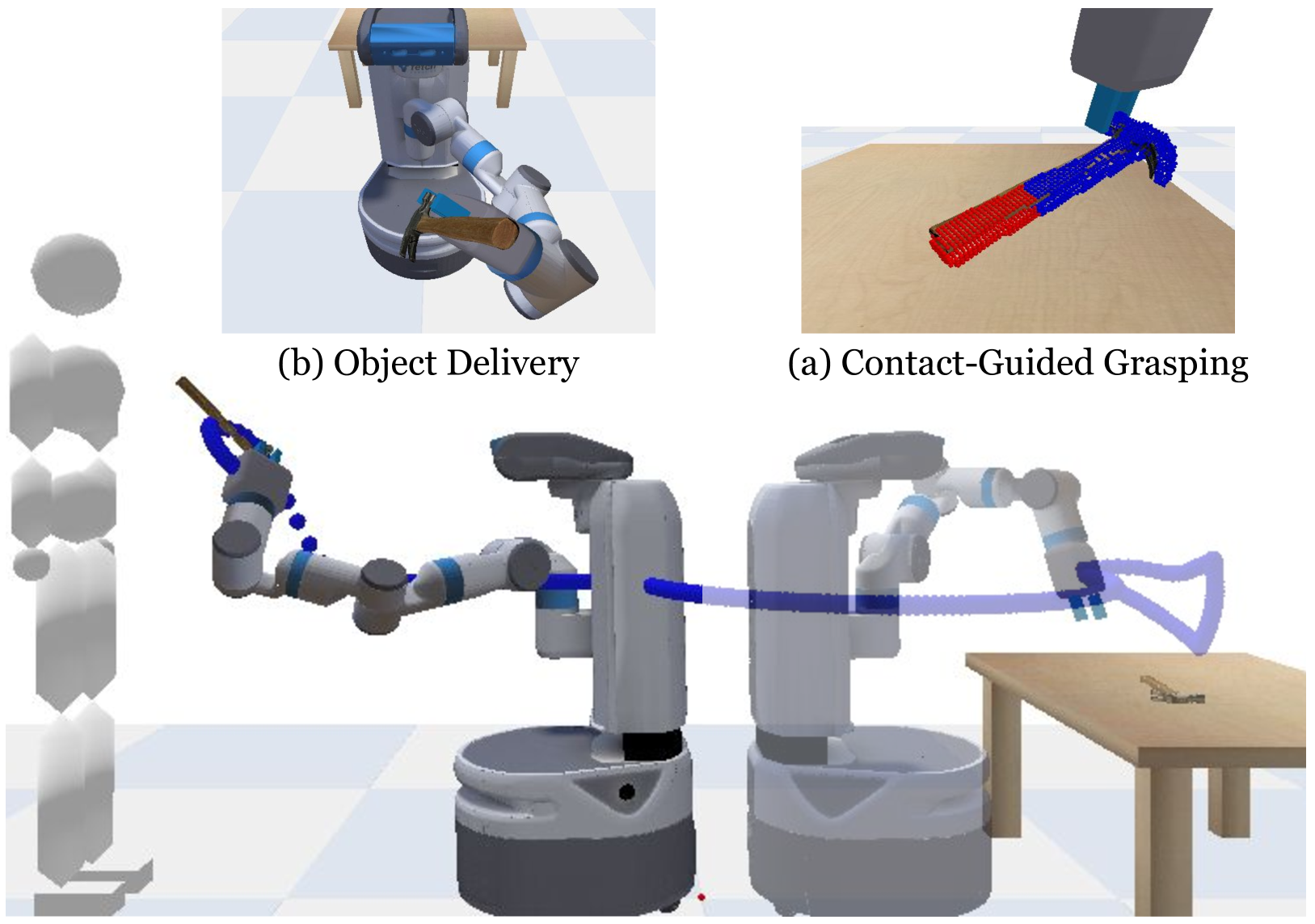
ContactHandover: Contact-Guided Robot-to-Human Object Handover
Zixi Wang, Zeyi Liu, Nicolas Ouporov, Shuran Song
Robot-to-human object handover is an important step in many human robot collaboration tasks. A successful handover requires the robot to maintain a stable grasp on the object while making sure the human receives the object in a natural and easy-to-use manner. We propose ContactHandover, a robot to human handover system that consists of two phases: a contact-guided grasping phase and an object delivery phase. During the grasping phase, ContactHandover predicts both 6-DoF robot grasp poses and a 3D affordance map of human contact points on the object. The robot grasp poses are reranked by penalizing those that block human contact points, and the robot executes the highest ranking grasp. During the delivery phase, the robot end effector pose is computed by maximizing human contact points close to the human while minimizing the human arm joint torques and displacements. We evaluate our system on 27 diverse household objects and show that our system achieves better visibility and reachability of human contacts to the receiver compared to several baselines. More results can be found on https://clairezixiwang.github.io/ContactHandover.github.io
Read more4/3/2024