PG-Attack: A Precision-Guided Adversarial Attack Framework Against Vision Foundation Models for Autonomous Driving

0

Sign in to get full access
Overview
- This paper introduces a novel adversarial attack framework called PG-Attack (Precision-Guided Attack) that targets vision foundation models for autonomous driving.
- The proposed framework leverages a precision-guided strategy to generate adversarial examples that can evade detection by vision systems in autonomous vehicles.
- The authors demonstrate the effectiveness of PG-Attack against various state-of-the-art object detection and image classification models for autonomous driving tasks.
Plain English Explanation
The paper presents a new way to attack autonomous driving systems by creating "adversarial examples" - slightly modified images that can trick the computer vision models used in self-driving cars. This builds on previous research on adversarial attacks against vision and language models for autonomous driving.
The key idea behind the PG-Attack framework is to precisely target the decision boundaries of the vision models, generating adversarial examples that are hard for the models to detect. This is in contrast to previous attacks that relied on more random or brute-force approaches. The authors also show how these attacks can be made more transferable, meaning they work across different models.
By fooling the computer vision in self-driving cars, these adversarial examples could potentially cause the vehicle to make dangerous mistakes, like failing to detect obstacles or pedestrians. This highlights the importance of building robust and secure AI systems for autonomous driving.
Technical Explanation
The PG-Attack framework works by first training a surrogate model to approximate the target vision model. It then uses this surrogate to guide the generation of adversarial examples, carefully optimizing the perturbations to push the target model's predictions across decision boundaries.
The authors show that this "one perturbation is enough" approach can generate universal adversarial examples that work across different models and datasets. They evaluate PG-Attack against object detection and image classification models for autonomous driving, demonstrating its effectiveness in fooling these systems.
The paper also explores the potential for multimodal attacks, where adversarial perturbations are applied to both visual and textual inputs. This could be relevant for autonomous systems that rely on combining computer vision with natural language processing.
Critical Analysis
The authors acknowledge that their attack framework assumes white-box access to the target models, which may not always be the case in real-world deployments. They suggest exploring black-box attack methods as an area for future research.
Additionally, the paper does not address the potential countermeasures or defenses that could be developed to mitigate these types of adversarial attacks. Exploring robust model training techniques and detection mechanisms would be an important next step.
Overall, the research highlights the vulnerability of current vision foundation models used in autonomous driving and the need for more secure and reliable AI systems in this critical domain.
Conclusion
The PG-Attack framework developed in this paper demonstrates a powerful new approach for generating adversarial examples that can fool the computer vision systems used in autonomous vehicles. This work underscores the importance of building robust and secure AI models for autonomous driving, as these systems could be susceptible to malicious attacks that could have severe consequences.
The insights from this research can inform the development of more resilient vision foundation models and the design of comprehensive security measures to protect autonomous driving systems. As the field of autonomous driving continues to evolve, addressing these adversarial vulnerabilities will be crucial for ensuring the safety and reliability of self-driving technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PG-Attack: A Precision-Guided Adversarial Attack Framework Against Vision Foundation Models for Autonomous Driving
Jiyuan Fu, Zhaoyu Chen, Kaixun Jiang, Haijing Guo, Shuyong Gao, Wenqiang Zhang
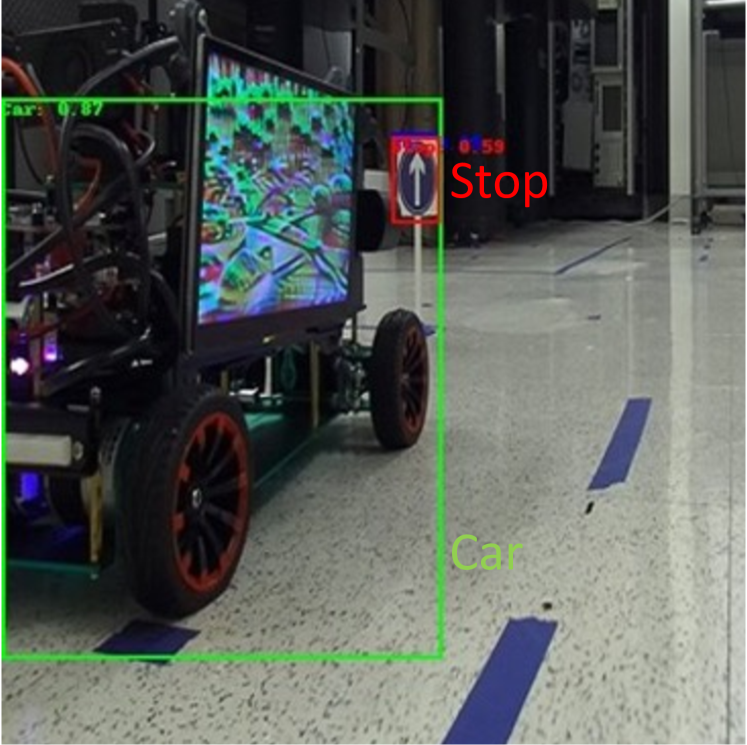
Vision foundation models are increasingly employed in autonomous driving systems due to their advanced capabilities. However, these models are susceptible to adversarial attacks, posing significant risks to the reliability and safety of autonomous vehicles. Adversaries can exploit these vulnerabilities to manipulate the vehicle's perception of its surroundings, leading to erroneous decisions and potentially catastrophic consequences. To address this challenge, we propose a novel Precision-Guided Adversarial Attack (PG-Attack) framework that combines two techniques: Precision Mask Perturbation Attack (PMP-Attack) and Deceptive Text Patch Attack (DTP-Attack). PMP-Attack precisely targets the attack region to minimize the overall perturbation while maximizing its impact on the target object's representation in the model's feature space. DTP-Attack introduces deceptive text patches that disrupt the model's understanding of the scene, further enhancing the attack's effectiveness. Our experiments demonstrate that PG-Attack successfully deceives a variety of advanced multi-modal large models, including GPT-4V, Qwen-VL, and imp-V1. Additionally, we won First-Place in the CVPR 2024 Workshop Challenge: Black-box Adversarial Attacks on Vision Foundation Models and codes are available at https://github.com/fuhaha824/PG-Attack.
Read more7/19/2024
🖼️
0
Robust Image Classification: Defensive Strategies against FGSM and PGD Adversarial Attacks
Hetvi Waghela, Jaydip Sen, Sneha Rakshit
Adversarial attacks, particularly the Fast Gradient Sign Method (FGSM) and Projected Gradient Descent (PGD) pose significant threats to the robustness of deep learning models in image classification. This paper explores and refines defense mechanisms against these attacks to enhance the resilience of neural networks. We employ a combination of adversarial training and innovative preprocessing techniques, aiming to mitigate the impact of adversarial perturbations. Our methodology involves modifying input data before classification and investigating different model architectures and training strategies. Through rigorous evaluation of benchmark datasets, we demonstrate the effectiveness of our approach in defending against FGSM and PGD attacks. Our results show substantial improvements in model robustness compared to baseline methods, highlighting the potential of our defense strategies in real-world applications. This study contributes to the ongoing efforts to develop secure and reliable machine learning systems, offering practical insights and paving the way for future research in adversarial defense. By bridging theoretical advancements and practical implementation, we aim to enhance the trustworthiness of AI applications in safety-critical domains.
Read more8/27/2024
0
Dynamic Adversarial Attacks on Autonomous Driving Systems
Amirhosein Chahe, Chenan Wang, Abhishek Jeyapratap, Kaidi Xu, Lifeng Zhou
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Read more5/16/2024
🛠️
0
Towards Transferable Attacks Against Vision-LLMs in Autonomous Driving with Typography
Nhat Chung, Sensen Gao, Tuan-Anh Vu, Jie Zhang, Aishan Liu, Yun Lin, Jin Song Dong, Qing Guo
Vision-Large-Language-Models (Vision-LLMs) are increasingly being integrated into autonomous driving (AD) systems due to their advanced visual-language reasoning capabilities, targeting the perception, prediction, planning, and control mechanisms. However, Vision-LLMs have demonstrated susceptibilities against various types of adversarial attacks, which would compromise their reliability and safety. To further explore the risk in AD systems and the transferability of practical threats, we propose to leverage typographic attacks against AD systems relying on the decision-making capabilities of Vision-LLMs. Different from the few existing works developing general datasets of typographic attacks, this paper focuses on realistic traffic scenarios where these attacks can be deployed, on their potential effects on the decision-making autonomy, and on the practical ways in which these attacks can be physically presented. To achieve the above goals, we first propose a dataset-agnostic framework for automatically generating false answers that can mislead Vision-LLMs' reasoning. Then, we present a linguistic augmentation scheme that facilitates attacks at image-level and region-level reasoning, and we extend it with attack patterns against multiple reasoning tasks simultaneously. Based on these, we conduct a study on how these attacks can be realized in physical traffic scenarios. Through our empirical study, we evaluate the effectiveness, transferability, and realizability of typographic attacks in traffic scenes. Our findings demonstrate particular harmfulness of the typographic attacks against existing Vision-LLMs (e.g., LLaVA, Qwen-VL, VILA, and Imp), thereby raising community awareness of vulnerabilities when incorporating such models into AD systems. We will release our source code upon acceptance.
Read more5/24/2024