Reducing Redundant Computation in Multi-Agent Coordination through Locally Centralized Execution

0

Sign in to get full access
Overview
- This paper explores a method to reduce redundant computation in multi-agent coordination tasks by using a locally centralized execution approach.
- The key idea is to have a central agent make decisions for a group of agents, rather than each agent independently deciding on their actions.
- This can lead to more efficient computation and potentially better coordination among the agents.
Plain English Explanation
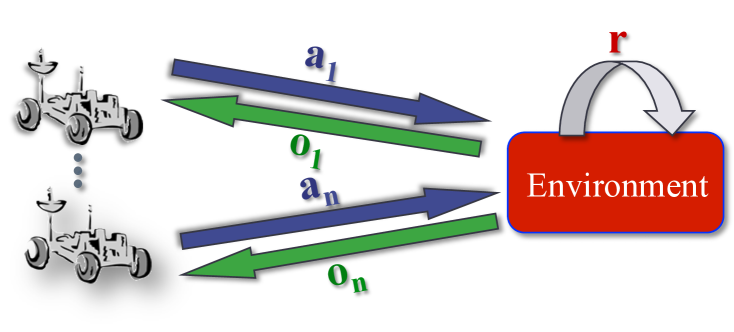
In many real-world scenarios, multiple agents (such as robots or autonomous vehicles) need to work together to accomplish a shared goal. This is known as "multi-agent coordination." However, when each agent independently decides on its actions, it can result in redundant computations and suboptimal coordination.
The researchers in this paper propose a new approach to address this issue. Instead of having each agent make its own decisions, they suggest using a "locally centralized execution" method. This means that one central agent is responsible for deciding the actions for a group of agents.
By centralizing the decision-making process, the system can avoid redundant computations that would occur if each agent acted independently. The central agent can consider the overall state of the group and make more coordinated decisions. This, in turn, can lead to more efficient and effective multi-agent cooperation.
The researchers provide a technical implementation of this approach and demonstrate its advantages through various experiments and comparisons to other multi-agent coordination methods. The centralized-vs-decentralized-multi-agent-reinforcement-learning paper explores similar trade-offs between centralized and decentralized approaches in multi-agent settings.
Technical Explanation
The paper introduces a new method for multi-agent coordination called "Locally Centralized Execution" (LCE). In this approach, the agents are divided into groups, and a central agent is responsible for deciding the actions for all agents within its group.
The central agent uses a deep neural network to process the observations from all the agents in its group and output the optimal actions for each agent. This centralized decision-making allows the system to avoid redundant computations that would occur if each agent acted independently.
The researchers implement LCE using a multi-agent deep reinforcement learning (MADRL) framework. They compare the performance of LCE to other MADRL approaches, such as agentcoord-visually-exploring-coordination-strategy-llm-based, ptde-personalized-training-distilled-execution-multi-agent, and x-light-cross-city-traffic-signal-control, across various multi-agent coordination tasks.
The experiments show that LCE can outperform the other approaches in terms of task completion, resource efficiency, and scalability. The centralized decision-making allows LCE to better coordinate the agents and avoid redundant computations, leading to superior performance.
Critical Analysis
The paper presents a promising approach to improving multi-agent coordination, but it also acknowledges several limitations and areas for further research.
One potential drawback is the reliance on a central agent, which could introduce a single point of failure or become a computational bottleneck as the number of agents increases. The researchers suggest exploring hierarchical or distributed variants of LCE to address this concern.
Additionally, the paper does not delve deeply into the impact of the group size or the agent clustering method on the overall performance of LCE. Further investigation into these design choices and their trade-offs would be valuable.
The llm-coordination-evaluating-analyzing-multi-agent-coordination paper provides a more comprehensive analysis of various multi-agent coordination strategies, which could provide useful insights for refining the LCE approach.
Conclusion
This paper presents a novel method for improving multi-agent coordination by using a locally centralized execution approach. The key idea is to have a central agent make decisions for a group of agents, rather than each agent acting independently.
The experiments conducted by the researchers demonstrate that this approach can lead to more efficient computation and better coordination among the agents, compared to other multi-agent reinforcement learning methods. However, the paper also highlights the need for further research to address potential limitations, such as the scalability of the centralized decision-making process.
Overall, the Locally Centralized Execution method offers a promising direction for enhancing the performance and efficiency of multi-agent systems in a wide range of applications, from robotics to autonomous transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Reducing Redundant Computation in Multi-Agent Coordination through Locally Centralized Execution
Yidong Bai, Toshiharu Sugawara
In multi-agent reinforcement learning, decentralized execution is a common approach, yet it suffers from the redundant computation problem. This occurs when multiple agents redundantly perform the same or similar computation due to overlapping observations. To address this issue, this study introduces a novel method referred to as locally centralized team transformer (LCTT). LCTT establishes a locally centralized execution framework where selected agents serve as leaders, issuing instructions, while the rest agents, designated as workers, act as these instructions without activating their policy networks. For LCTT, we proposed the team-transformer (T-Trans) architecture that allows leaders to provide specific instructions to each worker, and the leadership shift mechanism that allows agents autonomously decide their roles as leaders or workers. Our experimental results demonstrate that the proposed method effectively reduces redundant computation, does not decrease reward levels, and leads to faster learning convergence.
Read more4/23/2024

0
Decentralized Transformers with Centralized Aggregation are Sample-Efficient Multi-Agent World Models
Yang Zhang, Chenjia Bai, Bin Zhao, Junchi Yan, Xiu Li, Xuelong Li
Learning a world model for model-free Reinforcement Learning (RL) agents can significantly improve the sample efficiency by learning policies in imagination. However, building a world model for Multi-Agent RL (MARL) can be particularly challenging due to the scalability issue in a centralized architecture arising from a large number of agents, and also the non-stationarity issue in a decentralized architecture stemming from the inter-dependency among agents. To address both challenges, we propose a novel world model for MARL that learns decentralized local dynamics for scalability, combined with a centralized representation aggregation from all agents. We cast the dynamics learning as an auto-regressive sequence modeling problem over discrete tokens by leveraging the expressive Transformer architecture, in order to model complex local dynamics across different agents and provide accurate and consistent long-term imaginations. As the first pioneering Transformer-based world model for multi-agent systems, we introduce a Perceiver Transformer as an effective solution to enable centralized representation aggregation within this context. Results on Starcraft Multi-Agent Challenge (SMAC) show that it outperforms strong model-free approaches and existing model-based methods in both sample efficiency and overall performance.
Read more6/26/2024
0
An Introduction to Centralized Training for Decentralized Execution in Cooperative Multi-Agent Reinforcement Learning
Christopher Amato
Multi-agent reinforcement learning (MARL) has exploded in popularity in recent years. Many approaches have been developed but they can be divided into three main types: centralized training and execution (CTE), centralized training for decentralized execution (CTDE), and Decentralized training and execution (DTE). CTDE methods are the most common as they can use centralized information during training but execute in a decentralized manner -- using only information available to that agent during execution. CTDE is the only paradigm that requires a separate training phase where any available information (e.g., other agent policies, underlying states) can be used. As a result, they can be more scalable than CTE methods, do not require communication during execution, and can often perform well. CTDE fits most naturally with the cooperative case, but can be potentially applied in competitive or mixed settings depending on what information is assumed to be observed. This text is an introduction to CTDE in cooperative MARL. It is meant to explain the setting, basic concepts, and common methods. It does not cover all work in CTDE MARL as the subarea is quite extensive. I have included work that I believe is important for understanding the main concepts in the subarea and apologize to those that I have omitted.
Read more9/6/2024

0
Hierarchical Consensus-Based Multi-Agent Reinforcement Learning for Multi-Robot Cooperation Tasks
Pu Feng, Junkang Liang, Size Wang, Xin Yu, Xin Ji, Yiting Chen, Kui Zhang, Rongye Shi, Wenjun Wu
In multi-agent reinforcement learning (MARL), the Centralized Training with Decentralized Execution (CTDE) framework is pivotal but struggles due to a gap: global state guidance in training versus reliance on local observations in execution, lacking global signals. Inspired by human societal consensus mechanisms, we introduce the Hierarchical Consensus-based Multi-Agent Reinforcement Learning (HC-MARL) framework to address this limitation. HC-MARL employs contrastive learning to foster a global consensus among agents, enabling cooperative behavior without direct communication. This approach enables agents to form a global consensus from local observations, using it as an additional piece of information to guide collaborative actions during execution. To cater to the dynamic requirements of various tasks, consensus is divided into multiple layers, encompassing both short-term and long-term considerations. Short-term observations prompt the creation of an immediate, low-layer consensus, while long-term observations contribute to the formation of a strategic, high-layer consensus. This process is further refined through an adaptive attention mechanism that dynamically adjusts the influence of each consensus layer. This mechanism optimizes the balance between immediate reactions and strategic planning, tailoring it to the specific demands of the task at hand. Extensive experiments and real-world applications in multi-robot systems showcase our framework's superior performance, marking significant advancements over baselines.
Read more8/26/2024