RePLAy: Remove Projective LiDAR Depthmap Artifacts via Exploiting Epipolar Geometry

0

Sign in to get full access
Overview
- The paper presents a method called RePLAy (Remove Projective LiDAR Depthmap Artifacts) to remove artifacts in LiDAR depth maps caused by the projective nature of LiDAR sensors.
- The key idea is to leverage epipolar geometry between LiDAR and camera views to identify and correct these artifacts.
- The proposed approach is shown to outperform existing methods for LiDAR depth map refinement.
Plain English Explanation
LiDAR (Light Detection and Ranging) sensors are commonly used in autonomous vehicles and robotics to capture 3D information about the surrounding environment. However, the projective nature of LiDAR can introduce artifacts or distortions in the resulting depth maps. These artifacts can negatively impact applications like object detection and scene understanding.
The RePLAy method presented in this paper aims to address this issue by leveraging the epipolar geometry between the LiDAR and camera views. Epipolar geometry describes the relationship between corresponding points in two different views of the same scene. By understanding this geometric relationship, the researchers can identify and correct the artifacts in the LiDAR depth map.
The key steps of the RePLAy method are:
- Calibrate the LiDAR and camera to establish the epipolar geometry.
- Detect artifacts in the LiDAR depth map by analyzing the epipolar lines.
- Correct the detected artifacts using information from the camera view.
By addressing the LiDAR depth map artifacts in this way, the researchers demonstrate that RePLAy can improve the quality of 3D perception in autonomous systems compared to existing approaches. This can lead to better object detection, scene understanding, and overall performance in applications like self-driving cars and robotics.
Technical Explanation
The paper first discusses the problem of LiDAR depth map artifacts, which can be caused by the projective nature of LiDAR sensors. These artifacts can lead to inaccuracies in 3D perception tasks like object detection and scene understanding.
To address this issue, the authors propose the RePLAy method, which leverages the epipolar geometry between the LiDAR and camera views. The key steps are:
- Calibration: The LiDAR and camera are calibrated to establish the epipolar geometry, which describes the relationship between corresponding points in the two views.
- Artifact Detection: The epipolar lines in the LiDAR depth map are analyzed to identify regions containing artifacts.
- Artifact Correction: The identified artifact regions are corrected using information from the camera view, which is aligned with the LiDAR view via the established epipolar geometry.
The authors evaluate RePLAy on various datasets and show that it outperforms existing methods for LiDAR depth map refinement. The improvements in depth map quality can lead to better performance in 3D perception tasks compared to using the raw LiDAR data.
Critical Analysis
The paper presents a well-designed solution to a practical problem in 3D perception, and the authors have conducted thorough experiments to validate their approach. However, a few potential limitations and areas for further research are worth considering:
- Calibration Sensitivity: The performance of RePLAy is highly dependent on the accuracy of the LiDAR-camera calibration. In real-world scenarios, this calibration can drift over time, potentially impacting the method's effectiveness.
- Computational Complexity: The artifact detection and correction steps may be computationally intensive, which could be a challenge for real-time applications. The authors could investigate ways to optimize the algorithm's efficiency.
- Generalization to Other Sensor Configurations: The current implementation of RePLAy is tailored to a specific LiDAR-camera setup. It would be valuable to explore how the method can be extended to work with different sensor configurations, such as multiple LiDAR units or other types of 3D sensors.
Overall, the RePLAy method presents a promising approach to improving 3D perception by addressing a common issue in LiDAR depth maps. The authors have made a valuable contribution to the field, and the proposed techniques could be further refined and expanded upon in future research.
Conclusion
The RePLAy method presented in this paper addresses the problem of LiDAR depth map artifacts caused by the projective nature of LiDAR sensors. By leveraging the epipolar geometry between LiDAR and camera views, the authors have developed a technique to effectively identify and correct these artifacts, leading to improved 3D perception performance.
The demonstrated benefits of RePLAy, such as better object detection and scene understanding, have important implications for applications like autonomous vehicles and robotics, where accurate 3D information is crucial. While the method has a few potential limitations, the core ideas and techniques presented in this paper represent a significant contribution to the field of 3D perception and can inspire further advancements in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RePLAy: Remove Projective LiDAR Depthmap Artifacts via Exploiting Epipolar Geometry
Shengjie Zhu, Girish Chandar Ganesan, Abhinav Kumar, Xiaoming Liu
3D sensing is a fundamental task for Autonomous Vehicles. Its deployment often relies on aligned RGB cameras and LiDAR. Despite meticulous synchronization and calibration, systematic misalignment persists in LiDAR projected depthmap. This is due to the physical baseline distance between the two sensors. The artifact is often reflected as background LiDAR incorrectly projected onto the foreground, such as cars and pedestrians. The KITTI dataset uses stereo cameras as a heuristic solution to remove artifacts. However most AV datasets, including nuScenes, Waymo, and DDAD, lack stereo images, making the KITTI solution inapplicable. We propose RePLAy, a parameter-free analytical solution to remove the projective artifacts. We construct a binocular vision system between a hypothesized virtual LiDAR camera and the RGB camera. We then remove the projective artifacts by determining the epipolar occlusion with the proposed analytical solution. We show unanimous improvement in the State-of-The-Art (SoTA) monocular depth estimators and 3D object detectors with the artifacts-free depthmaps.
Read more7/30/2024
🛠️
0
Self-Supervised Depth Correction of Lidar Measurements from Map Consistency Loss
Ruslan Agishev, Tom'av{s} Pv{e}tv{r}'iv{c}ek, Karel Zimmermann
Depth perception is considered an invaluable source of information in the context of 3D mapping and various robotics applications. However, point cloud maps acquired using consumer-level light detection and ranging sensors (lidars) still suffer from bias related to local surface properties such as measuring beam-to-surface incidence angle, distance, texture, reflectance, or illumination conditions. This fact has recently motivated researchers to exploit traditional filters, as well as the deep learning paradigm, in order to suppress the aforementioned depth sensors error while preserving geometric and map consistency details. Despite the effort, depth correction of lidar measurements is still an open challenge mainly due to the lack of clean 3D data that could be used as ground truth. In this paper, we introduce two novel point cloud map consistency losses, which facilitate self-supervised learning on real data of lidar depth correction models. Specifically, the models exploit multiple point cloud measurements of the same scene from different view-points in order to learn to reduce the bias based on the constructed map consistency signal. Complementary to the removal of the bias from the measurements, we demonstrate that the depth correction models help to reduce localization drift. Additionally, we release a data set that contains point cloud data captured in an indoor corridor environment with precise localization and ground truth mapping information.
Read more5/24/2024

0
Incorporating dense metric depth into neural 3D representations for view synthesis and relighting
Arkadeep Narayan Chaudhury, Igor Vasiljevic, Sergey Zakharov, Vitor Guizilini, Rares Ambrus, Srinivasa Narasimhan, Christopher G. Atkeson
Synthesizing accurate geometry and photo-realistic appearance of small scenes is an active area of research with compelling use cases in gaming, virtual reality, robotic-manipulation, autonomous driving, convenient product capture, and consumer-level photography. When applying scene geometry and appearance estimation techniques to robotics, we found that the narrow cone of possible viewpoints due to the limited range of robot motion and scene clutter caused current estimation techniques to produce poor quality estimates or even fail. On the other hand, in robotic applications, dense metric depth can often be measured directly using stereo and illumination can be controlled. Depth can provide a good initial estimate of the object geometry to improve reconstruction, while multi-illumination images can facilitate relighting. In this work we demonstrate a method to incorporate dense metric depth into the training of neural 3D representations and address an artifact observed while jointly refining geometry and appearance by disambiguating between texture and geometry edges. We also discuss a multi-flash stereo camera system developed to capture the necessary data for our pipeline and show results on relighting and view synthesis with a few training views.
Read more9/6/2024
0
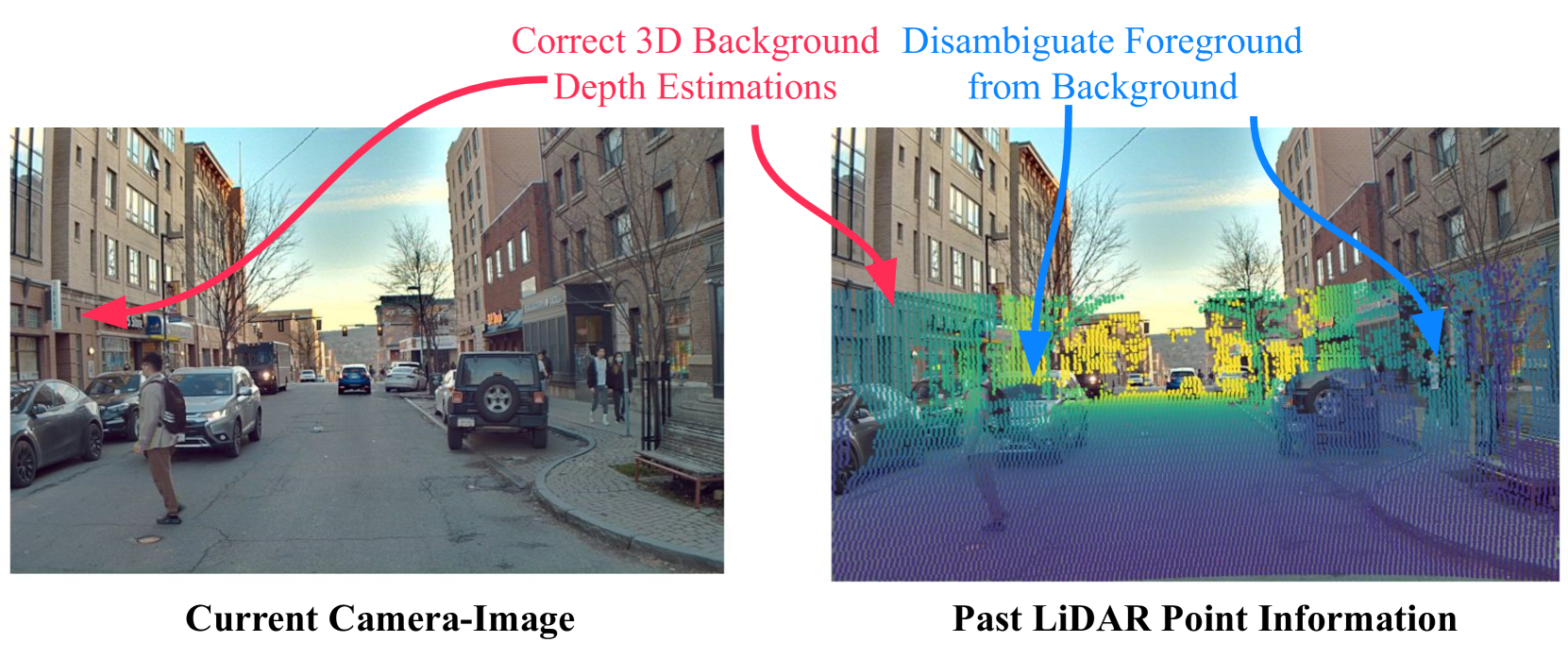
Better Monocular 3D Detectors with LiDAR from the Past
Yurong You, Cheng Perng Phoo, Carlos Andres Diaz-Ruiz, Katie Z Luo, Wei-Lun Chao, Mark Campbell, Bharath Hariharan, Kilian Q Weinberger
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
Read more4/11/2024