Research on Robot Path Planning Based on Reinforcement Learning
2404.14077
0
0
🏅
Abstract
This project has conducted research on robot path planning based on Visual SLAM. The main work of this project is as follows: (1) Construction of Visual SLAM system. Research has been conducted on the basic architecture of Visual SLAM. A Visual SLAM system is developed based on ORB-SLAM3 system, which can conduct dense point cloud mapping. (2) The map suitable for two-dimensional path planning is obtained through map conversion. This part converts the dense point cloud map obtained by Visual SLAM system into an octomap and then performs projection transformation to the grid map. The map conversion converts the dense point cloud map containing a large amount of redundant map information into an extremely lightweight grid map suitable for path planning. (3) Research on path planning algorithm based on reinforcement learning. This project has conducted experimental comparisons between the Q-learning algorithm, the DQN algorithm, and the SARSA algorithm, and found that DQN is the algorithm with the fastest convergence and best performance in high-dimensional complex environments. This project has conducted experimental verification of the Visual SLAM system in a simulation environment. The experimental results obtained based on open-source dataset and self-made dataset prove the feasibility and effectiveness of the designed Visual SLAM system. At the same time, this project has also conducted comparative experiments on the three reinforcement learning algorithms under the same experimental condition to obtain the optimal algorithm under the experimental condition.
Create account to get full access
Overview
- Developed a Visual SLAM (Simultaneous Localization and Mapping) system based on ORB-SLAM3 for dense point cloud mapping
- Converted the dense point cloud map into a lightweight grid map for efficient 2D path planning
- Explored reinforcement learning algorithms (Q-learning, DQN, SARSA) for robot path planning in complex environments
- Found that the DQN algorithm had the fastest convergence and best performance
Plain English Explanation
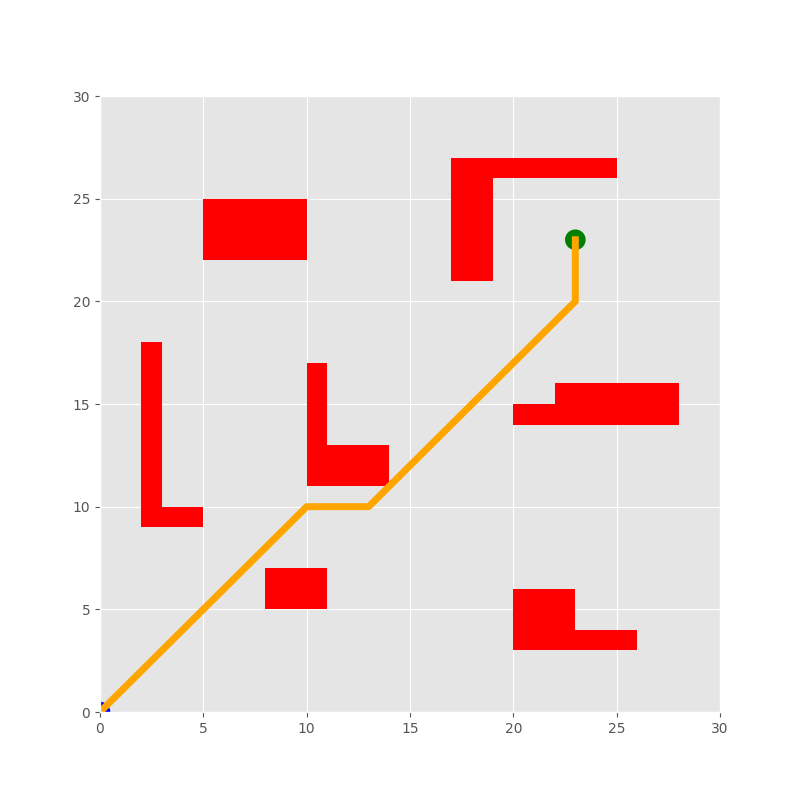
This project focused on improving robot navigation by combining visual mapping and reinforcement learning-based path planning. The researchers built a visual SLAM system that can create a dense 3D map of an environment using camera images. They then converted this detailed map into a simpler 2D grid map that is more suitable for path planning algorithms.
The key part of the project was testing different reinforcement learning algorithms to find the best one for planning the robot's path through the environment. Reinforcement learning allows the robot to learn an optimal path by trial and error, getting rewards for good decisions and penalties for bad ones. The researchers compared three algorithms - Q-learning, DQN, and SARSA - and found that DQN (Deep Q-Network) performed the best, converging quickly to an effective path-planning strategy even in complex environments.
Overall, this project demonstrates how visual mapping and advanced AI algorithms can be combined to help robots navigate and move through their surroundings more effectively, which could have applications in autonomous vehicles, search and rescue operations, and more.
Technical Explanation
The researchers began by constructing a Visual SLAM system based on the ORB-SLAM3 framework, which can generate a dense 3D point cloud map of the environment. To make this map more suitable for 2D path planning, they converted it into an octomap (a 3D grid representation) and then projected it down to a 2D grid map.
For the path planning component, the team experimented with three reinforcement learning algorithms - Q-learning, DQN, and SARSA. These algorithms allow the robot to learn an optimal path by trial and error, receiving rewards for good decisions and penalties for poor ones. The researchers found that the DQN algorithm had the fastest convergence and best performance, particularly in complex, high-dimensional environments.
The researchers validated their Visual SLAM system and reinforcement learning path planning approach through experiments in simulation environments, using both open-source and self-generated datasets. The results demonstrated the feasibility and effectiveness of the overall system.
Critical Analysis
The paper provides a thorough technical explanation of the research and the experimental design, which allows readers to understand the key components and assess the validity of the findings. However, the paper does not delve into potential limitations or areas for further research.
One potential concern is the reliance on simulation environments for the experiments. While this approach allows for controlled testing, it may not fully capture the complexity and uncertainty of real-world environments that robots would encounter. Further testing and validation in physical environments would help strengthen the generalizability of the results.
Additionally, the paper does not address potential issues with the robustness or reliability of the Visual SLAM system or the reinforcement learning algorithms. For example, how well would the system perform in the face of sensor failures, environmental changes, or other disruptions? Exploring these kinds of edge cases could provide valuable insights for real-world deployments.
Overall, the research presented in this paper represents a promising step forward in combining visual mapping and reinforcement learning for robot navigation. However, further work is needed to fully understand the limitations and potential applications of this approach, particularly in more complex real-world scenarios.
Conclusion
This project demonstrates the potential of combining visual SLAM and reinforcement learning for robot path planning. By developing a robust Visual SLAM system and exploring various reinforcement learning algorithms, the researchers were able to create a navigation system that can effectively plan paths in complex, high-dimensional environments.
The key findings of this work include the successful conversion of a dense 3D point cloud map into a 2D grid map suitable for path planning, and the superior performance of the DQN reinforcement learning algorithm compared to Q-learning and SARSA. These insights could have important implications for the development of autonomous navigation systems in a wide range of applications, from self-driving cars to search and rescue robots.
While the simulation-based experiments demonstrate the feasibility of the approach, further research is needed to address potential limitations and validate the system's performance in real-world scenarios. Nonetheless, this project represents an important step forward in advancing the field of robot navigation and path planning through the innovative integration of visual mapping and reinforcement learning techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
Deep Reinforcement Learning for Mobile Robot Path Planning
Hao Liu, Yi Shen, Shuangjiang Yu, Zijun Gao, Tong Wu
0
0
Path planning is an important problem with the the applications in many aspects, such as video games, robotics etc. This paper proposes a novel method to address the problem of Deep Reinforcement Learning (DRL) based path planning for a mobile robot. We design DRL-based algorithms, including reward functions, and parameter optimization, to avoid time-consuming work in a 2D environment. We also designed an Two-way search hybrid A* algorithm to improve the quality of local path planning. We transferred the designed algorithm to a simple embedded environment to test the computational load of the algorithm when running on a mobile robot. Experiments show that when deployed on a robot platform, the DRL-based algorithm in this article can achieve better planning results and consume less computing resources.
4/11/2024
Multi-AGV Path Planning Method via Reinforcement Learning and Particle Filters
Shao Shuo
0
0
Thanks to its robust learning and search stabilities,the reinforcement learning (RL) algorithm has garnered increasingly significant attention and been exten-sively applied in Automated Guided Vehicle (AGV) path planning. However, RL-based planning algorithms have been discovered to suffer from the substantial variance of neural networks caused by environmental instability and significant fluctua-tions in system structure. These challenges manifest in slow convergence speed and low learning efficiency. To tackle this issue, this paper presents a novel multi-AGV path planning method named Particle Filters - Double Deep Q-Network (PF-DDQN)via leveraging Particle Filters (PF) and RL algorithm. Firstly, the proposed method leverages the imprecise weight values of the network as state values to formulate thestate space equation.Subsequently, the DDQN model is optimized to acquire the optimal true weight values through the iterative fusion process of neural networksand PF in order to enhance the optimization efficiency of the proposedmethod. Lastly, the performance of the proposed method is validated by different numerical simulations. The simulation results demonstrate that the proposed methoddominates the traditional DDQN algorithm in terms of path planning superiority andtraining time indicator by 92.62% and 76.88%, respectively. Therefore, the proposedmethod could be considered as a vital alternative in the field of multi-AGV path planning.
5/24/2024
↗️
Prioritized experience replay-based DDQN for Unmanned Vehicle Path Planning
Liu Lipeng, Letian Xu, Jiabei Liu, Haopeng Zhao, Tongzhou Jiang, Tianyao Zheng
0
0
Path planning module is a key module for autonomous vehicle navigation, which directly affects its operating efficiency and safety. In complex environments with many obstacles, traditional planning algorithms often cannot meet the needs of intelligence, which may lead to problems such as dead zones in unmanned vehicles. This paper proposes a path planning algorithm based on DDQN and combines it with the prioritized experience replay method to solve the problem that traditional path planning algorithms often fall into dead zones. A series of simulation experiment results prove that the path planning algorithm based on DDQN is significantly better than other methods in terms of speed and accuracy, especially the ability to break through dead zones in extreme environments. Research shows that the path planning algorithm based on DDQN performs well in terms of path quality and safety. These research results provide an important reference for the research on automatic navigation of autonomous vehicles.
6/26/2024
Deep Reinforcement Learning with Enhanced PPO for Safe Mobile Robot Navigation
Hamid Taheri, Seyed Rasoul Hosseini
0
0
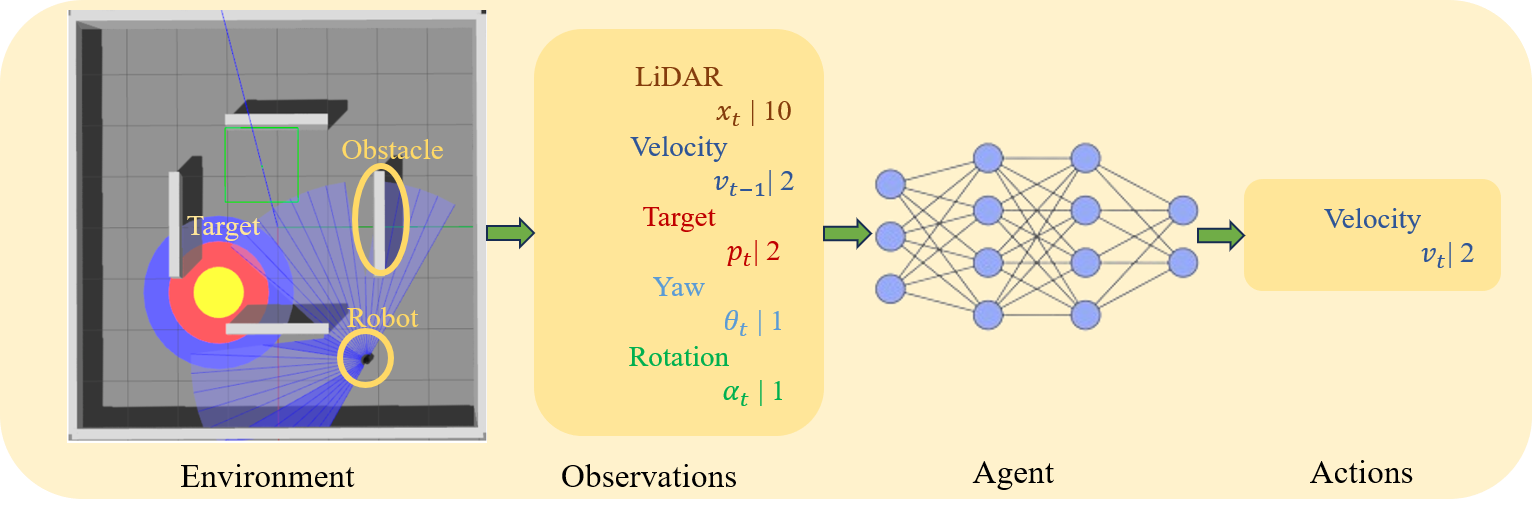
Collision-free motion is essential for mobile robots. Most approaches to collision-free and efficient navigation with wheeled robots require parameter tuning by experts to obtain good navigation behavior. This study investigates the application of deep reinforcement learning to train a mobile robot for autonomous navigation in a complex environment. The robot utilizes LiDAR sensor data and a deep neural network to generate control signals guiding it toward a specified target while avoiding obstacles. We employ two reinforcement learning algorithms in the Gazebo simulation environment: Deep Deterministic Policy Gradient and proximal policy optimization. The study introduces an enhanced neural network structure in the Proximal Policy Optimization algorithm to boost performance, accompanied by a well-designed reward function to improve algorithm efficacy. Experimental results conducted in both obstacle and obstacle-free environments underscore the effectiveness of the proposed approach. This research significantly contributes to the advancement of autonomous robotics in complex environments through the application of deep reinforcement learning.
5/28/2024