A Review of Reward Functions for Reinforcement Learning in the context of Autonomous Driving

0
🏅
Sign in to get full access
Overview
- Reinforcement learning has emerged as a key approach for autonomous driving
- Developing a suitable reward function is a fundamental challenge in this complex domain with conflicting objectives
- This paper aims to assess different reward function formulations and categorize individual objectives into Safety, Comfort, Progress, and Traffic Rules compliance
Plain English Explanation
Autonomous driving is a complex challenge with many different goals that sometimes conflict with each other. Reinforcement learning, a type of machine learning, has become an important tool for teaching self-driving cars how to drive. In reinforcement learning, the system is given a "reward function" that tells it what the desired behaviors are and helps guide it towards the best driving policy.
Developing a good reward function for autonomous driving is really hard, because there are so many different things the car needs to balance, like being safe, providing a comfortable ride, making progress towards the destination, and obeying traffic rules. This paper looks at how researchers have tried to design these reward functions and categorizes the different objectives into groups like safety, comfort, progress, and rules compliance.
The paper also discusses the limitations of the reward functions that have been proposed so far, such as how they combine the different objectives and don't always take into account the specific driving context. It suggests that more work is needed to create reward functions that are better able to resolve conflicts between objectives and are more aware of the current driving situation.
Technical Explanation
This paper examines the challenge of designing suitable reward functions for reinforcement learning in the context of autonomous driving. Reward functions are used to establish the learned skill objectives and guide the agent towards the optimal policy.
The authors assess different reward function formulations proposed in the literature and categorize the individual objectives into four groups: Safety, Comfort, Progress, and Traffic Rules compliance. This analysis highlights limitations in the existing reward functions, such as issues with aggregating the different objectives and a lack of consideration for the driving context.
For example, the paper discusses how reward functions can sometimes lead to overly aggressive behavior if the safety and progress objectives are not properly balanced. It also notes that the reward categories are often not well-defined or standardized across research.
To address these shortcomings, the authors propose future research directions, including the development of a reward validation framework and the design of structured rewards that are context-aware and able to resolve conflicts between objectives.
Critical Analysis
The paper does a good job of highlighting the fundamental challenge of designing effective reward functions for autonomous driving, which is a complex domain with potentially conflicting objectives. The categorization of individual objectives into Safety, Comfort, Progress, and Traffic Rules compliance provides a helpful framework for analyzing different reward function formulations.
However, the paper also acknowledges that the existing reward functions have significant limitations, such as issues with aggregating the different objectives and a lack of consideration for the driving context. These are important shortcomings that need to be addressed to ensure that reinforcement learning-based autonomous driving systems behave in a safe, comfortable, and efficient manner.
The proposed future research directions, such as a reward validation framework and context-aware structured rewards, seem promising. Developing these types of advanced reward functions could help resolve conflicts between objectives and lead to more robust and reliable autonomous driving systems.
One area that the paper does not explore in depth is the potential ethical implications of reward function design. As autonomous vehicles become more prevalent, it will be crucial to ensure that the underlying reward functions align with societal values and priorities, such as protecting human life and minimizing harm. This is an important consideration that could be further examined in future research.
Conclusion
This paper highlights the fundamental challenge of designing suitable reward functions for reinforcement learning in autonomous driving, a complex domain with potentially conflicting objectives. The authors categorize individual objectives into Safety, Comfort, Progress, and Traffic Rules compliance, and identify limitations in the existing reward function formulations.
To address these shortcomings, the paper proposes future research directions, including the development of a reward validation framework and the design of structured rewards that are context-aware and able to resolve conflicts between objectives. Addressing these research gaps could lead to more robust and reliable autonomous driving systems that balance the various competing priorities.
Overall, this paper provides a valuable contribution to the ongoing efforts to create safe and effective autonomous driving technologies through the use of reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
A Review of Reward Functions for Reinforcement Learning in the context of Autonomous Driving
Ahmed Abouelazm, Jonas Michel, J. Marius Zoellner
Reinforcement learning has emerged as an important approach for autonomous driving. A reward function is used in reinforcement learning to establish the learned skill objectives and guide the agent toward the optimal policy. Since autonomous driving is a complex domain with partly conflicting objectives with varying degrees of priority, developing a suitable reward function represents a fundamental challenge. This paper aims to highlight the gap in such function design by assessing different proposed formulations in the literature and dividing individual objectives into Safety, Comfort, Progress, and Traffic Rules compliance categories. Additionally, the limitations of the reviewed reward functions are discussed, such as objectives aggregation and indifference to driving context. Furthermore, the reward categories are frequently inadequately formulated and lack standardization. This paper concludes by proposing future research that potentially addresses the observed shortcomings in rewards, including a reward validation framework and structured rewards that are context-aware and able to resolve conflicts.
Read more5/3/2024

0
Generating and Evolving Reward Functions for Highway Driving with Large Language Models
Xu Han, Qiannan Yang, Xianda Chen, Xiaowen Chu, Meixin Zhu
Reinforcement Learning (RL) plays a crucial role in advancing autonomous driving technologies by maximizing reward functions to achieve the optimal policy. However, crafting these reward functions has been a complex, manual process in many practices. To reduce this complexity, we introduce a novel framework that integrates Large Language Models (LLMs) with RL to improve reward function design in autonomous driving. This framework utilizes the coding capabilities of LLMs, proven in other areas, to generate and evolve reward functions for highway scenarios. The framework starts with instructing LLMs to create an initial reward function code based on the driving environment and task descriptions. This code is then refined through iterative cycles involving RL training and LLMs' reflection, which benefits from their ability to review and improve the output. We have also developed a specific prompt template to improve LLMs' understanding of complex driving simulations, ensuring the generation of effective and error-free code. Our experiments in a highway driving simulator across three traffic configurations show that our method surpasses expert handcrafted reward functions, achieving a 22% higher average success rate. This not only indicates safer driving but also suggests significant gains in development productivity.
Read more6/18/2024
0
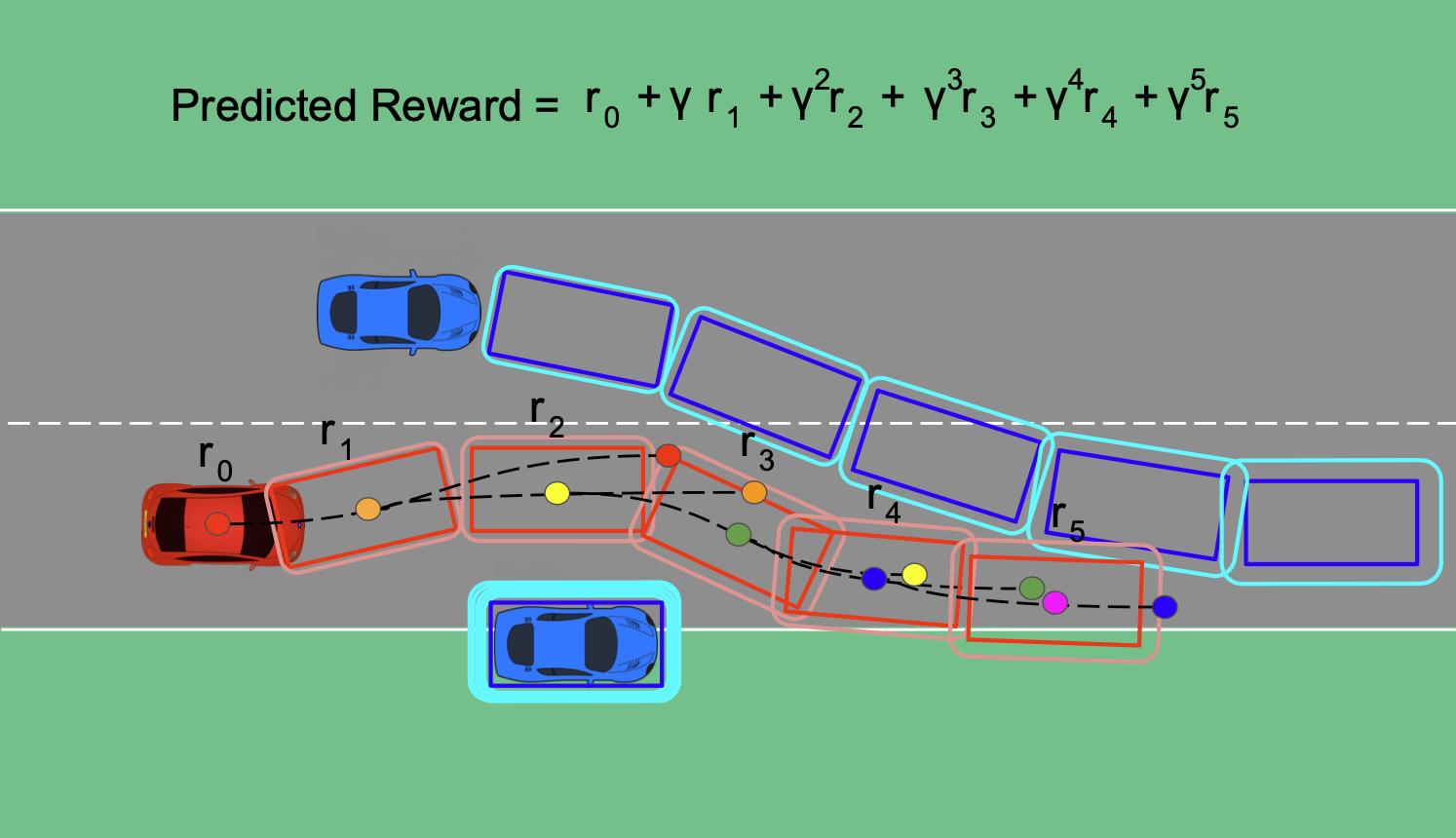
Trajectory Planning for Autonomous Vehicle Using Iterative Reward Prediction in Reinforcement Learning
Hyunwoo Park
Traditional trajectory planning methods for autonomous vehicles have several limitations. For example, heuristic and explicit simple rules limit generalizability and hinder complex motions. These limitations can be addressed using reinforcement learning-based trajectory planning. However, reinforcement learning suffers from unstable learning, and existing reinforcement learning-based trajectory planning methods do not consider the uncertainties. Thus, this paper, proposes a reinforcement learning-based trajectory planning method for autonomous vehicles. The proposed method involves an iterative reward prediction approach that iteratively predicts expectations of future states. These predicted states are then used to forecast rewards and integrated into the learning process to enhance stability. Additionally, a method is proposed that utilizes uncertainty propagation to make the reinforcement learning agent aware of uncertainties. The proposed method was evaluated using the CARLA simulator. Compared to the baseline methods, the proposed method reduced the collision rate by 60.17 %, and increased the average reward by 30.82 times. A video of the proposed method is available at https://www.youtube.com/watch?v=PfDbaeLfcN4.
Read more5/14/2024

0
Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey
Ruiqi Zhang, Jing Hou, Florian Walter, Shangding Gu, Jiayi Guan, Florian Rohrbein, Yali Du, Panpan Cai, Guang Chen, Alois Knoll
Reinforcement Learning (RL) is a potent tool for sequential decision-making and has achieved performance surpassing human capabilities across many challenging real-world tasks. As the extension of RL in the multi-agent system domain, multi-agent RL (MARL) not only need to learn the control policy but also requires consideration regarding interactions with all other agents in the environment, mutual influences among different system components, and the distribution of computational resources. This augments the complexity of algorithmic design and poses higher requirements on computational resources. Simultaneously, simulators are crucial to obtain realistic data, which is the fundamentals of RL. In this paper, we first propose a series of metrics of simulators and summarize the features of existing benchmarks. Second, to ease comprehension, we recall the foundational knowledge and then synthesize the recently advanced studies of MARL-related autonomous driving and intelligent transportation systems. Specifically, we examine their environmental modeling, state representation, perception units, and algorithm design. Conclusively, we discuss open challenges as well as prospects and opportunities. We hope this paper can help the researchers integrate MARL technologies and trigger more insightful ideas toward the intelligent and autonomous driving.
Read more8/20/2024