RICE: Breaking Through the Training Bottlenecks of Reinforcement Learning with Explanation

0

Sign in to get full access
Overview
- This paper introduces RICE, a novel reinforcement learning (RL) algorithm that aims to address common training bottlenecks in RL.
- RICE combines ideas from imitation-bootstrapped reinforcement learning, reverse-forward curriculum learning, and sample-efficient robust multi-agent reinforcement learning to improve sample efficiency and training stability.
- The authors also propose an adaptive reinforcement learning approach for robot control and demonstrate how reinforcement learning can integrate compressed contexts to further enhance performance.
Plain English Explanation
RICE is a new machine learning algorithm that aims to make reinforcement learning (RL) more effective and efficient. RL is a type of AI that learns by trial and error, like a child learning to play a game. However, RL can often be slow and unstable during training.
RICE combines several techniques to address these problems. First, it uses "imitation learning," where the algorithm starts by mimicking the actions of an expert, then gradually learns to improve on its own. This helps the algorithm learn faster and more reliably.
RICE also uses "curriculum learning," which means starting with simpler tasks and gradually increasing the difficulty. This allows the algorithm to build up its skills step-by-step, rather than being overwhelmed by a complex task right away.
Additionally, RICE incorporates ideas from "multi-agent" RL, where multiple algorithms work together and learn from each other. This can make the overall system more robust and sample-efficient, meaning it can learn effectively with fewer training examples.
Finally, RICE allows the algorithm to adapt its own control strategy, and to take advantage of "compressed" information about the task, which can further boost its performance.
By combining these various techniques, the authors show that RICE can significantly outperform standard RL approaches on a range of benchmark tasks. This could lead to more capable and reliable AI systems in the future.
Technical Explanation
The key innovations in the RICE algorithm are:
-
Imitation-Bootstrapped Reinforcement Learning: RICE starts by having the agent imitate an expert policy, then gradually shifts to learning its own policy through RL. This helps the agent learn more efficiently from the beginning.
-
Reverse-Forward Curriculum Learning: RICE uses a curriculum learning approach that starts with simpler versions of the task and gradually increases the difficulty. This is done by first training the agent on a "reverse" version of the task, then transitioning to the full "forward" version.
-
Sample-Efficient Robust Multi-Agent Reinforcement Learning: RICE incorporates ideas from multi-agent RL, where multiple agents with different roles collaborate and learn from each other. This can improve sample efficiency and the overall robustness of the learning process.
-
Adaptive Reinforcement Learning for Robot Control: RICE allows the agent to dynamically adapt its own control strategy during training, which can further enhance performance, especially for complex control tasks like robotics.
-
Integrating Compressed Contexts: RICE leverages "compressed" contextual information about the task, which can provide useful signals to guide the agent's learning, beyond just the raw sensory inputs.
The authors evaluate RICE on a range of benchmark RL tasks, including continuous control problems and multi-agent scenarios. They show that RICE consistently outperforms standard RL algorithms in terms of sample efficiency, training stability, and final performance.
Critical Analysis
The RICE algorithm presents some promising ideas for addressing common challenges in reinforcement learning, such as sample inefficiency and training instability. By incorporating techniques like imitation learning, curriculum learning, and multi-agent collaboration, the authors demonstrate that significant performance gains are possible.
However, the paper does not provide a detailed analysis of the limitations or potential downsides of the RICE approach. For example, the reliance on expert demonstrations for imitation learning may limit the applicability of RICE to domains where such demonstrations are not available. Additionally, the authors do not discuss the computational overhead or training time required for the various components of RICE, which could be an important practical consideration.
Furthermore, the paper lacks a thorough investigation of the underlying reasons for RICE's superior performance. While the authors provide intuitive explanations for how the different techniques contribute to improved learning, a deeper analysis of the specific mechanisms and their relative importance would be valuable for the research community.
Future work could explore the generalizability of RICE to a wider range of RL tasks, as well as examine its robustness to different types of environments and agent dynamics. Investigating the scalability of RICE to more complex, high-dimensional problems would also be an important next step.
Conclusion
The RICE algorithm represents an interesting and promising approach to addressing some of the key challenges in reinforcement learning. By combining ideas from imitation learning, curriculum learning, multi-agent RL, and adaptive control, the authors have demonstrated significant performance improvements on a variety of benchmark tasks.
While the paper leaves room for further exploration of the limitations and underlying mechanisms of RICE, the overall concept and results suggest that this type of hybrid, multi-faceted RL approach could be a fruitful direction for future research. If successful, such advancements in RL could lead to more capable and reliable AI systems that can learn and adapt more efficiently in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RICE: Breaking Through the Training Bottlenecks of Reinforcement Learning with Explanation
Zelei Cheng, Xian Wu, Jiahao Yu, Sabrina Yang, Gang Wang, Xinyu Xing
Deep reinforcement learning (DRL) is playing an increasingly important role in real-world applications. However, obtaining an optimally performing DRL agent for complex tasks, especially with sparse rewards, remains a significant challenge. The training of a DRL agent can be often trapped in a bottleneck without further progress. In this paper, we propose RICE, an innovative refining scheme for reinforcement learning that incorporates explanation methods to break through the training bottlenecks. The high-level idea of RICE is to construct a new initial state distribution that combines both the default initial states and critical states identified through explanation methods, thereby encouraging the agent to explore from the mixed initial states. Through careful design, we can theoretically guarantee that our refining scheme has a tighter sub-optimality bound. We evaluate RICE in various popular RL environments and real-world applications. The results demonstrate that RICE significantly outperforms existing refining schemes in enhancing agent performance.
Read more6/7/2024

0
Demystifying Reinforcement Learning in Production Scheduling via Explainable AI
Daniel Fischer, Hannah M. Husener, Felix Grumbach, Lukas Vollenkemper, Arthur Muller, Pascal Reusch
Deep Reinforcement Learning (DRL) is a frequently employed technique to solve scheduling problems. Although DRL agents ace at delivering viable results in short computing times, their reasoning remains opaque. We conduct a case study where we systematically apply two explainable AI (xAI) frameworks, namely SHAP (DeepSHAP) and Captum (Input x Gradient), to describe the reasoning behind scheduling decisions of a specialized DRL agent in a flow production. We find that methods in the xAI literature lack falsifiability and consistent terminology, do not adequately consider domain-knowledge, the target audience or real-world scenarios, and typically provide simple input-output explanations rather than causal interpretations. To resolve this issue, we introduce a hypotheses-based workflow. This approach enables us to inspect whether explanations align with domain knowledge and match the reward hypotheses of the agent. We furthermore tackle the challenge of communicating these insights to third parties by tailoring hypotheses to the target audience, which can serve as interpretations of the agent's behavior after verification. Our proposed workflow emphasizes the repeated verification of explanations and may be applicable to various DRL-based scheduling use cases.
Read more9/2/2024
🤯
0
CIER: A Novel Experience Replay Approach with Causal Inference in Deep Reinforcement Learning
Jingwen Wang, Dehui Du, Yida Li, Yiyang Li, Yikang Chen
In the training process of Deep Reinforcement Learning (DRL), agents require repetitive interactions with the environment. With an increase in training volume and model complexity, it is still a challenging problem to enhance data utilization and explainability of DRL training. This paper addresses these challenges by focusing on the temporal correlations within the time dimension of time series. We propose a novel approach to segment multivariate time series into meaningful subsequences and represent the time series based on these subsequences. Furthermore, the subsequences are employed for causal inference to identify fundamental causal factors that significantly impact training outcomes. We design a module to provide feedback on the causality during DRL training. Several experiments demonstrate the feasibility of our approach in common environments, confirming its ability to enhance the effectiveness of DRL training and impart a certain level of explainability to the training process. Additionally, we extended our approach with priority experience replay algorithm, and experimental results demonstrate the continued effectiveness of our approach.
Read more5/15/2024
0
Concept-Based Interpretable Reinforcement Learning with Limited to No Human Labels
Zhuorui Ye, Stephanie Milani, Geoffrey J. Gordon, Fei Fang
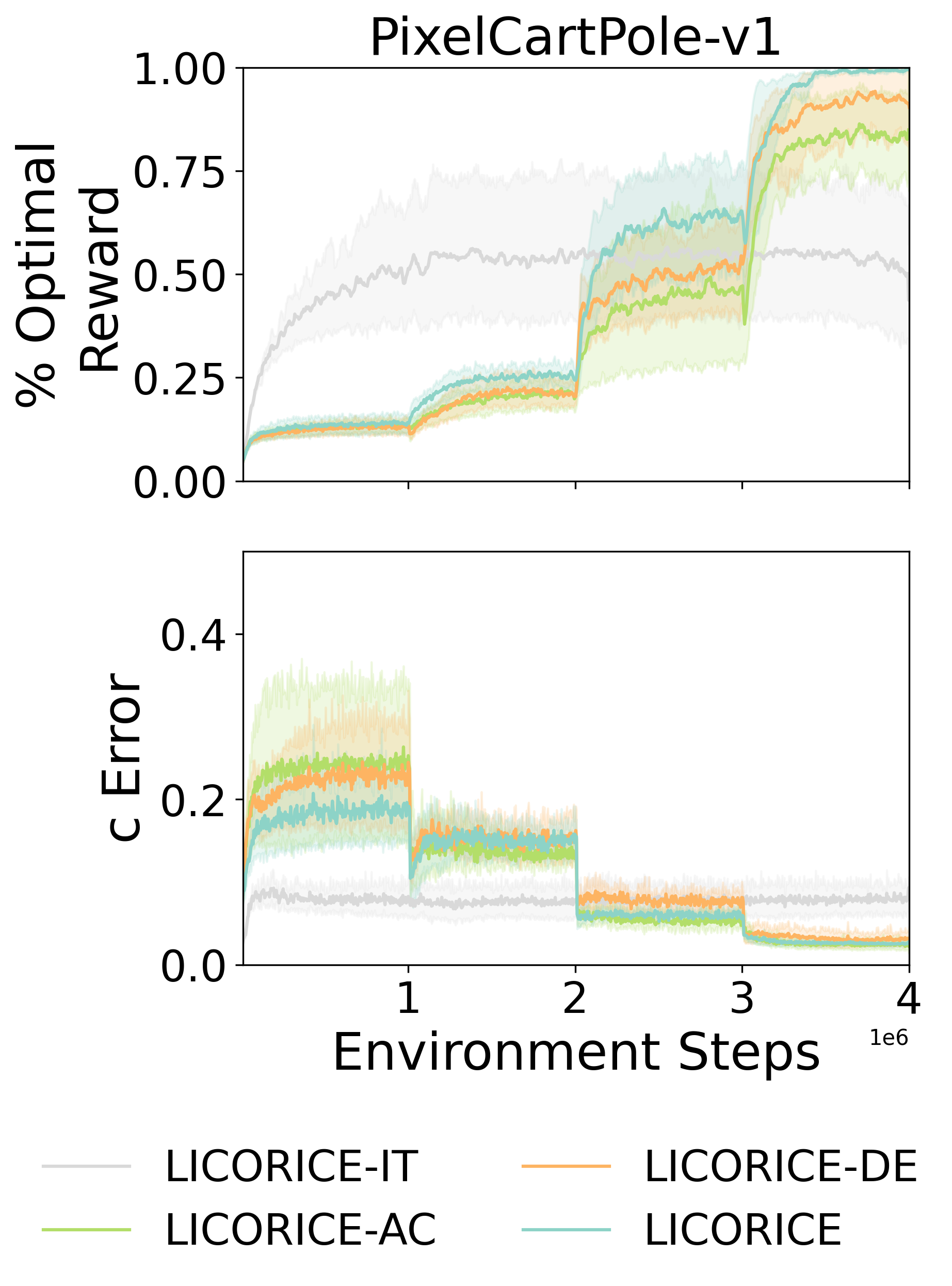
Recent advances in reinforcement learning (RL) have predominantly leveraged neural network-based policies for decision-making, yet these models often lack interpretability, posing challenges for stakeholder comprehension and trust. Concept bottleneck models offer an interpretable alternative by integrating human-understandable concepts into neural networks. However, a significant limitation in prior work is the assumption that human annotations for these concepts are readily available during training, necessitating continuous real-time input from human annotators. To overcome this limitation, we introduce a novel training scheme that enables RL algorithms to efficiently learn a concept-based policy by only querying humans to label a small set of data, or in the extreme case, without any human labels. Our algorithm, LICORICE, involves three main contributions: interleaving concept learning and RL training, using a concept ensembles to actively select informative data points for labeling, and decorrelating the concept data with a simple strategy. We show how LICORICE reduces manual labeling efforts to to 500 or fewer concept labels in three environments. Finally, we present an initial study to explore how we can use powerful vision-language models to infer concepts from raw visual inputs without explicit labels at minimal cost to performance.
Read more7/23/2024