RoBus: A Multimodal Dataset for Controllable Road Networks and Building Layouts Generation

0

Sign in to get full access
Overview
- This paper introduces RoBus, a large-scale multimodal dataset for generating controllable road networks and building layouts.
- The dataset includes diverse road network topologies, building shapes, and associated semantic and visual information.
- RoBus is designed to enable research in areas like urban planning, autonomous driving, and 3D scene generation.
Plain English Explanation
RoBus is a comprehensive dataset that can be used to generate realistic city environments. It contains a wide variety of road networks, building shapes, and other related information. This data can be very useful for researchers working on projects like urban planning, self-driving cars, and 3D scene creation.
The key innovation of RoBus is that it provides a multimodal dataset for controllable road networks and building layouts generation. This means the dataset includes not just the visual elements like roads and buildings, but also additional semantic and contextual information that can be used to precisely control and customize the generated environments.
For example, researchers could use RoBus to train a machine learning model to automatically create new city layouts based on high-level specifications, or to test autonomous vehicle algorithms in simulated urban settings that closely match the real world. The diverse and comprehensive nature of the dataset is intended to make it a valuable resource for a range of applications in fields like urban planning, autonomous driving, and 3D scene generation.
Technical Explanation
The RoBus dataset was collected from various sources including satellite imagery, road network data, and 3D building models. It contains information on road topologies, building footprints and shapes, and associated semantic attributes like road types, building functions, and terrain features.
To enable fine-grained control over the generated environments, the dataset also includes additional metadata such as road network graphs, building style templates, and contextual relationships between different elements. This multimodal data allows researchers to customize and combine road networks, building layouts, and other scene components in novel ways.
The authors evaluated the diversity and realism of the RoBus dataset through a series of quantitative and qualitative experiments. They demonstrated that the generated environments exhibit similar statistical properties to real-world urban areas, while also providing a high degree of user control over the output.
Critical Analysis
The RoBus dataset represents a significant contribution to the field of urban modeling and scene generation. By providing a large-scale, multimodal dataset with rich annotations, the authors have enabled new possibilities for research and applications in areas like autonomous driving, urban planning, and 3D content creation.
However, the paper does not address certain limitations of the dataset, such as potential biases in the source data or the representativeness of the included urban environments. Additionally, the authors do not discuss the computational and storage requirements for working with the full RoBus dataset, which could be a practical concern for some users.
Further research could explore ways to enhance the dataset, such as incorporating more diverse building styles, infrastructure elements, and environmental conditions. Validating the usefulness of RoBus for specific downstream tasks, like training urban planning decision support systems or evaluating autonomous vehicle behaviors, would also be valuable.
Conclusion
The RoBus dataset introduces a novel approach to generating controllable and realistic urban environments. By combining road networks, building layouts, and associated semantic information, the dataset enables a wide range of applications in fields like urban planning, autonomous driving, and 3D scene generation. The comprehensive and multimodal nature of RoBus makes it a valuable resource for researchers and practitioners working to create more intelligent and adaptive urban systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoBus: A Multimodal Dataset for Controllable Road Networks and Building Layouts Generation
Tao Li, Ruihang Li, Huangnan Zheng, Shanding Ye, Shijian Li, Zhijie Pan
Automated 3D city generation, focusing on road networks and building layouts, is in high demand for applications in urban design, multimedia games and autonomous driving simulations. The surge of generative AI facilitates designing city layouts based on deep learning models. However, the lack of high-quality datasets and benchmarks hinders the progress of these data-driven methods in generating road networks and building layouts. Furthermore, few studies consider urban characteristics, which generally take graphics as analysis objects and are crucial for practical applications, to control the generative process. To alleviate these problems, we introduce a multimodal dataset with accompanying evaluation metrics for controllable generation of Road networks and Building layouts (RoBus), which is the first and largest open-source dataset in city generation so far. RoBus dataset is formatted as images, graphics and texts, with $72,400$ paired samples that cover around $80,000km^2$ globally. We analyze the RoBus dataset statistically and validate the effectiveness against existing road networks and building layouts generation methods. Additionally, we design new baselines that incorporate urban characteristics, such as road orientation and building density, in the process of generating road networks and building layouts using the RoBus dataset, enhancing the practicality of automated urban design. The RoBus dataset and related codes are published at https://github.com/tourlics/RoBus_Dataset.
Read more7/11/2024
0
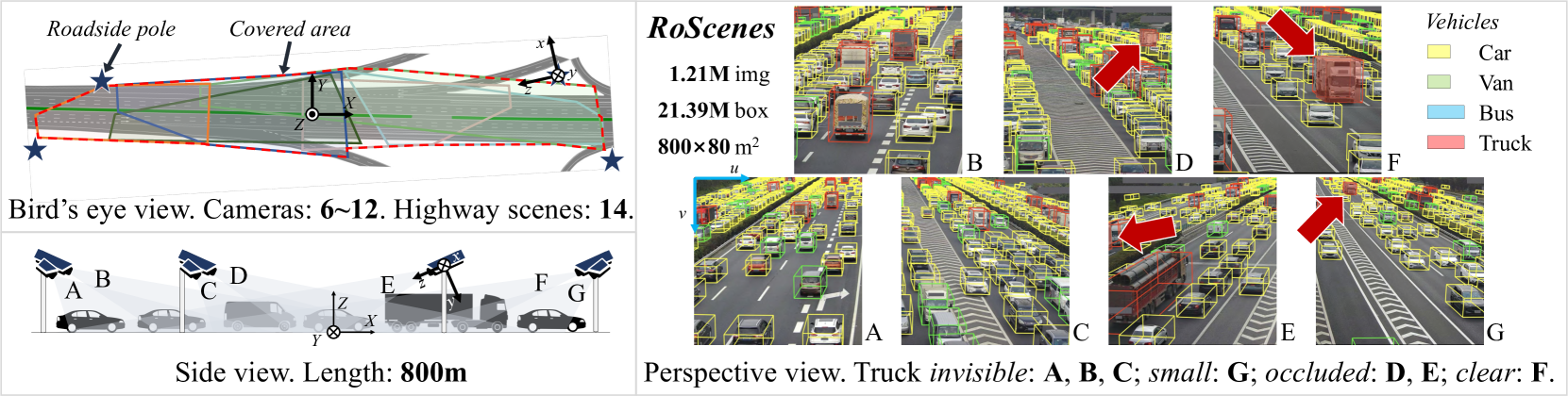
RoScenes: A Large-scale Multi-view 3D Dataset for Roadside Perception
Xiaosu Zhu, Hualian Sheng, Sijia Cai, Bing Deng, Shaopeng Yang, Qiao Liang, Ken Chen, Lianli Gao, Jingkuan Song, Jieping Ye
We introduce RoScenes, the largest multi-view roadside perception dataset, which aims to shed light on the development of vision-centric Bird's Eye View (BEV) approaches for more challenging traffic scenes. The highlights of RoScenes include significantly large perception area, full scene coverage and crowded traffic. More specifically, our dataset achieves surprising 21.13M 3D annotations within 64,000 $m^2$. To relieve the expensive costs of roadside 3D labeling, we present a novel BEV-to-3D joint annotation pipeline to efficiently collect such a large volume of data. After that, we organize a comprehensive study for current BEV methods on RoScenes in terms of effectiveness and efficiency. Tested methods suffer from the vast perception area and variation of sensor layout across scenes, resulting in performance levels falling below expectations. To this end, we propose RoBEV that incorporates feature-guided position embedding for effective 2D-3D feature assignment. With its help, our method outperforms state-of-the-art by a large margin without extra computational overhead on validation set. Our dataset and devkit will be made available at https://github.com/xiaosu-zhu/RoScenes.
Read more7/8/2024
🤷
0
CityNet: A Comprehensive Multi-Modal Urban Dataset for Advanced Research in Urban Computing
Zhengfei Zheng, Xu Geng, Hai Yang
Data-driven approaches have emerged as a popular tool for addressing challenges in urban computing. However, current research efforts have primarily focused on limited data sources, which fail to capture the complexity of urban data arising from multiple entities and their interconnections. Therefore, a comprehensive and multifaceted dataset is required to enable more extensive studies in urban computing. In this paper, we present CityNet, a multi-modal urban dataset that incorporates various data, including taxi trajectory, traffic speed, point of interest (POI), road network, wind, rain, temperature, and more, from seven cities. We categorize this comprehensive data into three streams: mobility data, geographical data, and meteorological data. We begin by detailing the generation process and basic properties of CityNet. Additionally, we conduct extensive data mining and machine learning experiments, including spatio-temporal predictions, transfer learning, and reinforcement learning, to facilitate the use of CityNet. Our experimental results provide benchmarks for various tasks and methods, and also reveal internal correlations among cities and tasks within CityNet that can be leveraged to improve spatiotemporal forecasting performance. Based on our benchmarking results and the correlations uncovered, we believe that CityNet can significantly contribute to the field of urban computing by enabling research on advanced topics.
Read more4/11/2024

0
Bosch Street Dataset: A Multi-Modal Dataset with Imaging Radar for Automated Driving
Karim Armanious, Maurice Quach, Michael Ulrich, Timo Winterling, Johannes Friesen, Sascha Braun, Daniel Jenet, Yuri Feldman, Eitan Kosman, Philipp Rapp, Volker Fischer, Marc Sons, Lukas Kohns, Daniel Eckstein, Daniela Egbert, Simone Letsch, Corinna Voege, Felix Huttner, Alexander Bartler, Robert Maiwald, Yancong Lin, Ulf Ruegg, Claudius Glaser, Bastian Bischoff, Jascha Freess, Karsten Haug, Kathrin Klee, Holger Caesar
This paper introduces the Bosch street dataset (BSD), a novel multi-modal large-scale dataset aimed at promoting highly automated driving (HAD) and advanced driver-assistance systems (ADAS) research. Unlike existing datasets, BSD offers a unique integration of high-resolution imaging radar, lidar, and camera sensors, providing unprecedented 360-degree coverage to bridge the current gap in high-resolution radar data availability. Spanning urban, rural, and highway environments, BSD enables detailed exploration into radar-based object detection and sensor fusion techniques. The dataset is aimed at facilitating academic and research collaborations between Bosch and current and future partners. This aims to foster joint efforts in developing cutting-edge HAD and ADAS technologies. The paper describes the dataset's key attributes, including its scalability, radar resolution, and labeling methodology. Key offerings also include initial benchmarks for sensor modalities and a development kit tailored for extensive data analysis and performance evaluation, underscoring our commitment to contributing valuable resources to the HAD and ADAS research community.
Read more7/19/2024