Robust Visual Tracking via Iterative Gradient Descent and Threshold Selection

0

Sign in to get full access
Overview
- This paper presents a robust visual tracking method that combines iterative gradient descent and threshold selection to handle challenging tracking scenarios.
- The proposed approach aims to improve the performance and robustness of visual tracking systems, particularly in cases where the target object is small or the environment is cluttered.
- The method leverages iterative gradient descent to refine the target location and a novel threshold selection technique to adaptively update the tracking model.
Plain English Explanation
The paper focuses on improving the way computer vision systems track objects in video. Tracking objects, like a person or a car, is an important task in many applications, such as surveillance, autonomous vehicles, and augmented reality. However, tracking can be challenging when the target object is small or the environment is complex, with many distractions.
The researchers developed a new tracking method that combines two key techniques: iterative gradient descent and threshold selection. Iterative gradient descent helps the system refine the location of the target object, even when it's hard to see. The threshold selection technique allows the system to adaptively update its tracking model, so it can better handle changes in the environment or the target object's appearance.
By combining these techniques, the researchers were able to create a more robust and effective visual tracking system, which can perform well even in challenging scenarios where the target is small or the background is cluttered. This could have important applications in real-time tracking and dynamic scene analysis.
Technical Explanation
The paper presents a visual tracking method that combines iterative gradient descent and threshold selection to address the challenges of tracking small targets in cluttered environments.
The core of the approach is an iterative gradient descent optimization process that refines the target location by minimizing a cost function based on the target appearance model. This allows the tracker to precisely locate the target, even when it is difficult to distinguish from the background.
To make the tracker more robust, the researchers also introduce a novel threshold selection technique. This adaptively adjusts the confidence threshold used to update the target appearance model, based on the tracker's current performance. By dynamically updating the threshold, the method can better handle changes in the target's appearance or the environment, improving the tracker's long-term stability.
The authors evaluate their approach on several standard benchmarks and demonstrate significant improvements over state-of-the-art tracking methods, particularly for small targets in cluttered scenes. They also show the method can run in real-time, making it suitable for practical applications.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed tracking method, using established benchmarks and comparing to a range of competing approaches. The authors convincingly demonstrate the advantages of their technique, particularly for challenging tracking scenarios.
However, one potential limitation is the reliance on a fixed target appearance model. While the threshold selection mechanism helps adapt to changes, the authors acknowledge that more advanced appearance modeling could further improve robustness, especially for long-term tracking of targets with significant appearance variations.
Additionally, the paper does not explore the method's performance on highly dynamic or occluded scenes, where the target may temporarily disappear from view. Extending the approach to handle these scenarios could broaden its applicability.
Overall, the research represents a notable contribution to the field of visual tracking, providing a novel and effective solution for addressing the challenges of small target detection and tracking in cluttered environments. The techniques introduced in this work could inspire further innovations in this important area of computer vision.
Conclusion
This paper presents a robust visual tracking method that combines iterative gradient descent and adaptive threshold selection to address the challenges of small target detection and tracking in cluttered environments. The key innovations include a precise iterative optimization process for target localization and a novel technique for dynamically updating the tracking model's confidence threshold.
Experimental results demonstrate the method's superior performance compared to state-of-the-art trackers, particularly for tracking small objects in complex scenes. The real-time capability of the approach also makes it suitable for practical applications in areas like surveillance, robotics, and augmented reality.
While the paper does not explore all possible tracking scenarios, the techniques introduced here represent an important step forward in developing more robust and adaptive visual tracking systems. As computer vision continues to advance, methods like this will play a crucial role in enabling a wide range of intelligent applications that rely on accurate and reliable object tracking.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robust Visual Tracking via Iterative Gradient Descent and Threshold Selection
Zhuang Qi, Junlin Zhang, Xin Qi
Visual tracking fundamentally involves regressing the state of the target in each frame of a video. Despite significant progress, existing regression-based trackers still tend to experience failures and inaccuracies. To enhance the precision of target estimation, this paper proposes a tracking technique based on robust regression. Firstly, we introduce a novel robust linear regression estimator, which achieves favorable performance when the error vector follows i.i.d Gaussian-Laplacian distribution. Secondly, we design an iterative process to quickly solve the problem of outliers. In fact, the coefficients are obtained by Iterative Gradient Descent and Threshold Selection algorithm (IGDTS). In addition, we expend IGDTS to a generative tracker, and apply IGDTS-distance to measure the deviation between the sample and the model. Finally, we propose an update scheme to capture the appearance changes of the tracked object and ensure that the model is updated correctly. Experimental results on several challenging image sequences show that the proposed tracker outperformance existing trackers.
Read more6/4/2024
🗣️
0
Outlier-Robust Geometric Perception: A Novel Thresholding-Based Estimator with Intra-Class Variance Maximization
Lei Sun
Geometric perception problems are fundamental tasks in robotics and computer vision. In real-world applications, they often encounter the inevitable issue of outliers, preventing traditional algorithms from making correct estimates. In this paper, we present a novel general-purpose robust estimator TIVM (Thresholding with Intra-class Variance Maximization) that can collaborate with standard non-minimal solvers to efficiently reject outliers for geometric perception problems. First, we introduce the technique of intra-class variance maximization to design a dynamic 2-group thresholding method on the measurement residuals, aiming to distinctively separate inliers from outliers. Then, we develop an iterative framework that robustly optimizes the model by approaching the pure-inlier group using a multi-layered dynamic thresholding strategy as subroutine, in which a self-adaptive mechanism for layer-number tuning is further employed to minimize the user-defined parameters. We validate the proposed estimator on 3 classic geometric perception problems: rotation averaging, point cloud registration and category-level perception, and experiments show that it is robust against 70--90% of outliers and can converge typically in only 3--15 iterations, much faster than state-of-the-art robust solvers such as RANSAC, GNC and ADAPT. Furthermore, another highlight is that: our estimator can retain approximately the same level of robustness even when the inlier-noise statistics of the problem are fully unknown.
Read more7/2/2024

0
Dim Small Target Detection and Tracking: A Novel Method Based on Temporal Energy Selective Scaling and Trajectory Association
Weihua Gao, Wenlong Niu, Wenlong Lu, Pengcheng Wang, Zhaoyuan Qi, Xiaodong Peng, Zhen Yang
The detection and tracking of small targets in passive optical remote sensing (PORS) has broad applications. However, most of the previously proposed methods seldom utilize the abundant temporal features formed by target motion, resulting in poor detection and tracking performance for low signal-to-clutter ratio (SCR) targets. In this article, we analyze the difficulty based on spatial features and the feasibility based on temporal features of realizing effective detection. According to this analysis, we use a multi-frame as a detection unit and propose a detection method based on temporal energy selective scaling (TESS). Specifically, we investigated the composition of intensity temporal profiles (ITPs) formed by pixels on a multi-frame detection unit. For the target-present pixel, the target passing through the pixel will bring a weak transient disturbance on the ITP and introduce a change in the statistical properties of ITP. We use a well-designed function to amplify the transient disturbance, suppress the background and noise components, and output the trajectory of the target on the multi-frame detection unit. Subsequently, to solve the contradiction between the detection rate and the false alarm rate brought by the traditional threshold segmentation, we associate the temporal and spatial features of the output trajectory and propose a trajectory extraction method based on the 3D Hough transform. Finally, we model the trajectory of the target and propose a trajectory-based multi-target tracking method. Compared with the various state-of-the-art detection and tracking methods, experiments in multiple scenarios prove the superiority of our proposed methods.
Read more5/16/2024
0
A Novel Bounding Box Regression Method for Single Object Tracking
Omar Abdelaziz, Mohamed Sami Shehata
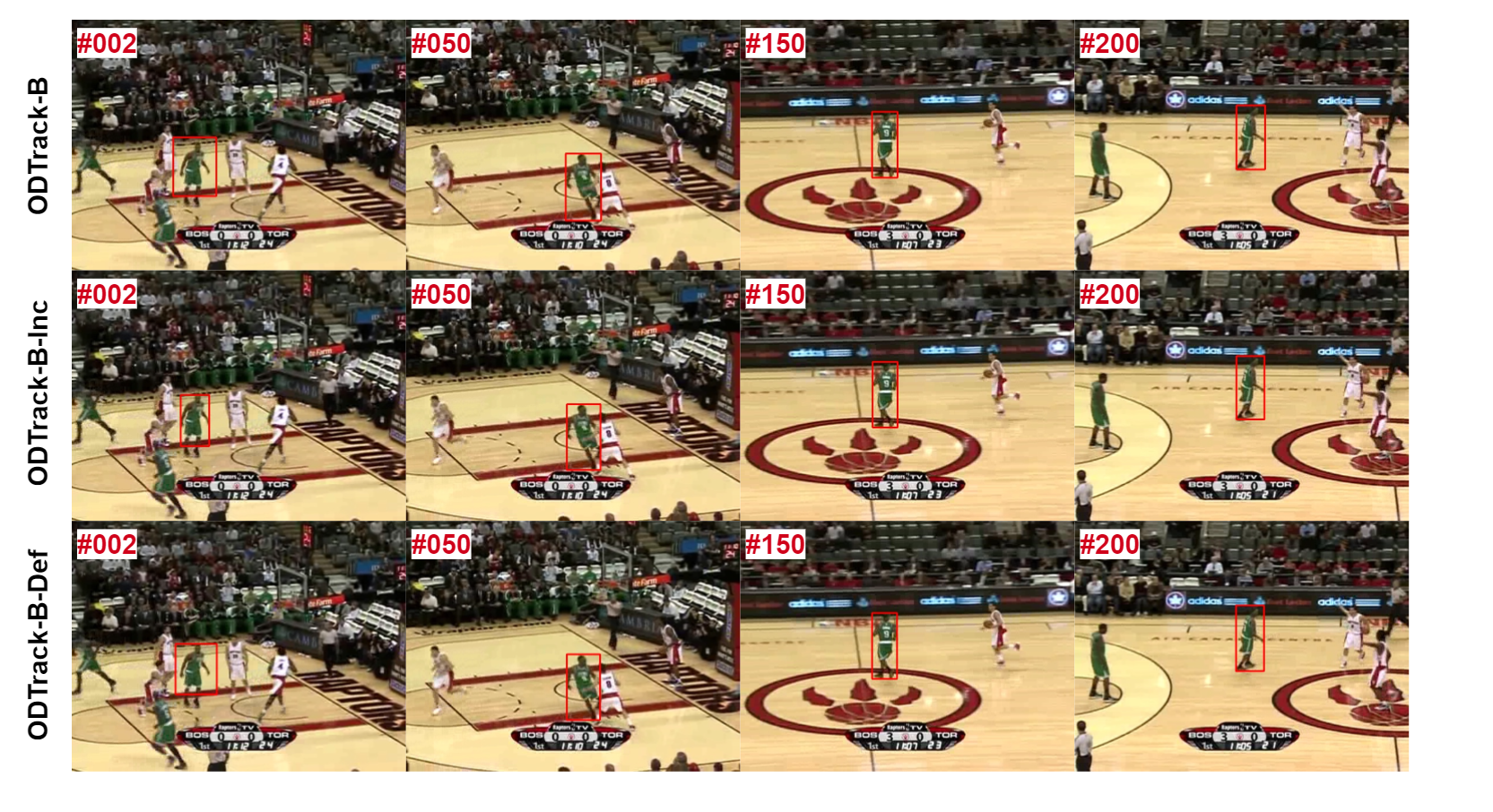
Locating an object in a sequence of frames, given its appearance in the first frame of the sequence, is a hard problem that involves many stages. Usually, state-of-the-art methods focus on bringing novel ideas in the visual encoding or relational modelling phases. However, in this work, we show that bounding box regression from learned joint search and template features is of high importance as well. While previous methods relied heavily on well-learned features representing interactions between search and template, we hypothesize that the receptive field of the input convolutional bounding box network plays an important role in accurately determining the object location. To this end, we introduce two novel bounding box regression networks: inception and deformable. Experiments and ablation studies show that our inception module installed on the recent ODTrack outperforms the latter on three benchmarks: the GOT-10k, the UAV123 and the OTB2015.
Read more5/20/2024