Trajectory Planning using Reinforcement Learning for Interactive Overtaking Maneuvers in Autonomous Racing Scenarios
2404.10658
0
0
🏅
Abstract
Conventional trajectory planning approaches for autonomous racing are based on the sequential execution of prediction of the opposing vehicles and subsequent trajectory planning for the ego vehicle. If the opposing vehicles do not react to the ego vehicle, they can be predicted accurately. However, if there is interaction between the vehicles, the prediction loses its validity. For high interaction, instead of a planning approach that reacts exclusively to the fixed prediction, a trajectory planning approach is required that incorporates the interaction with the opposing vehicles. This paper demonstrates the limitations of a widely used conventional sampling-based approach within a highly interactive blocking scenario. We show that high success rates are achieved for less aggressive blocking behavior but that the collision rate increases with more significant interaction. We further propose a novel Reinforcement Learning (RL)-based trajectory planning approach for racing that explicitly exploits the interaction with the opposing vehicle without requiring a prediction. In contrast to the conventional approach, the RL-based approach achieves high success rates even for aggressive blocking behavior. Furthermore, we propose a novel safety layer (SL) that intervenes when the trajectory generated by the RL-based approach is infeasible. In that event, the SL generates a sub-optimal but feasible trajectory, avoiding termination of the scenario due to a not found valid solution.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- Conventional trajectory planning for autonomous racing relies on predicting the behavior of opposing vehicles, but this approach breaks down when there is interaction between the vehicles.
- This paper explores the limitations of a widely used conventional sampling-based approach in a highly interactive blocking scenario and proposes a novel Reinforcement Learning (RL)-based trajectory planning approach that explicitly incorporates vehicle interaction.
- The paper also introduces a safety layer that generates a feasible trajectory when the RL-based approach fails to find a valid solution.
Plain English Explanation
In autonomous racing, the typical way to plan a vehicle's trajectory is to first predict the behavior of the other vehicles on the track, and then plan the ego vehicle's (the vehicle being controlled) trajectory based on that prediction. However, this approach has a major limitation: if the other vehicles start interacting with the ego vehicle, the prediction becomes inaccurate, and the planned trajectory may no longer be valid.
To address this issue, the researchers in this paper propose a new Reinforcement Learning (RL)-based trajectory planning approach that directly incorporates the interaction between the vehicles, without relying on a prediction. This allows the ego vehicle to plan its trajectory in a way that accounts for the other vehicles' reactions.
The paper first demonstrates the limitations of a widely used conventional sampling-based approach in a highly interactive "blocking" scenario, where one vehicle tries to block another. They show that this conventional approach works well when the blocking behavior is not too aggressive, but starts to break down as the level of interaction increases.
In contrast, the researchers' RL-based approach is able to maintain high success rates even for aggressive blocking behavior. Additionally, the paper introduces a "safety layer" that can generate a feasible (although potentially suboptimal) trajectory when the RL-based approach fails to find a valid solution, preventing the scenario from ending prematurely.
Technical Explanation
The paper starts by highlighting the limitations of the conventional, sequential approach to trajectory planning for autonomous racing. This approach first predicts the behavior of the opposing vehicles, and then plans the trajectory for the ego vehicle based on that prediction. However, the authors note that this approach breaks down when there is significant interaction between the vehicles, as the prediction becomes invalid.
To address this issue, the researchers propose a novel Reinforcement Learning (RL)-based trajectory planning approach that explicitly incorporates the interaction with the opposing vehicles, without relying on a prediction.
The paper first evaluates the performance of a widely used conventional sampling-based approach within a highly interactive "blocking" scenario, where one vehicle tries to block another. The results show that this conventional approach achieves high success rates for less aggressive blocking behavior, but the collision rate increases as the level of interaction becomes more significant.
In contrast, the researchers' proposed RL-based approach is able to maintain high success rates even for aggressive blocking behavior. The key innovation is that the RL-based approach directly learns to plan trajectories that account for the interaction with the opposing vehicle, without the need for a separate prediction step.
Additionally, the paper introduces a "safety layer" (SL) that intervenes when the trajectory generated by the RL-based approach is infeasible. In such cases, the SL generates a suboptimal but feasible trajectory, preventing the scenario from ending prematurely due to a lack of a valid solution.
Critical Analysis
The paper presents a compelling approach to address the limitations of conventional trajectory planning methods in highly interactive autonomous racing scenarios. The proposed RL-based approach is a significant advancement, as it explicitly handles vehicle-to-vehicle interaction without relying on a potentially inaccurate prediction.
However, the paper does not provide a detailed analysis of the computational complexity and real-time performance of the RL-based approach. This is an important consideration, as autonomous racing systems need to make decisions quickly to respond to the dynamic environment. The authors should have discussed the scalability of their approach and any potential trade-offs between the RL-based planning and the safety layer in terms of computational efficiency.
Additionally, the paper could have explored the generalization capabilities of the RL-based approach. While the results demonstrate impressive performance in the specific blocking scenario, it would be valuable to understand how the approach would perform in a wider range of interactive situations, such as overtaking maneuvers or off-road navigation.
Finally, the paper could have discussed potential ethical and safety considerations of the proposed approach. For example, how does the system handle situations where the interaction between vehicles could lead to dangerous or undesirable outcomes, and how can the interpretability of the RL-based planning be improved to ensure transparency and trust in the decision-making process.
Conclusion
This paper presents a novel Reinforcement Learning-based trajectory planning approach for autonomous racing that directly addresses the limitations of conventional methods in highly interactive scenarios. By incorporating vehicle-to-vehicle interaction into the planning process, the proposed approach is able to maintain high success rates even for aggressive blocking behavior, a significant improvement over the widely used sampling-based approach.
The introduction of a safety layer that generates feasible trajectories when the RL-based approach fails further enhances the robustness of the system, ensuring that the scenario does not terminate prematurely due to a lack of a valid solution.
While the paper demonstrates the strength of the RL-based approach, it also highlights the need for further research on the computational efficiency, generalization capabilities, and ethical considerations of such advanced trajectory planning techniques. As autonomous racing continues to evolve, these factors will be crucial in ensuring the safe and reliable deployment of these systems in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
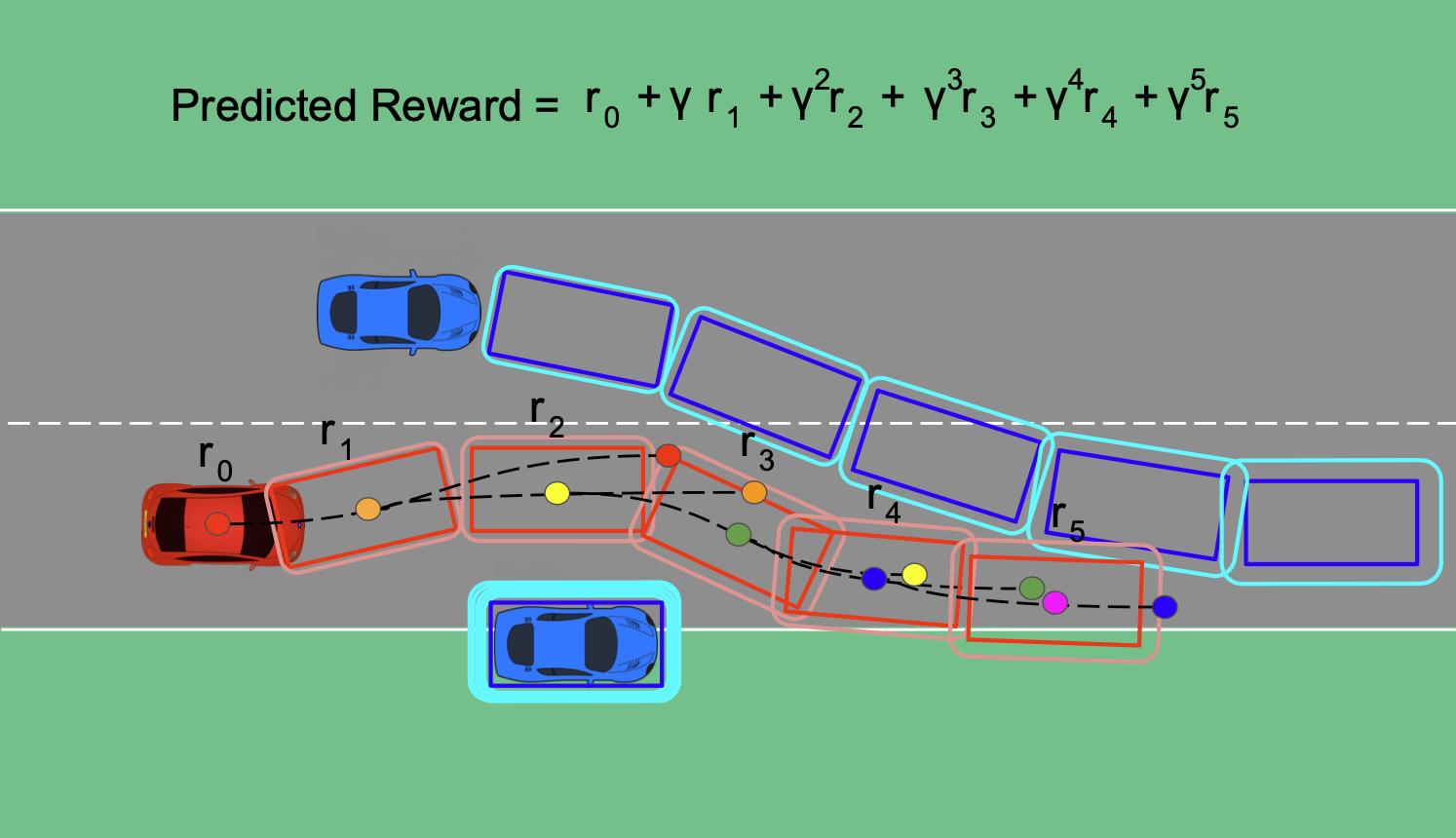
Trajectory Planning for Autonomous Vehicle Using Iterative Reward Prediction in Reinforcement Learning
Hyunwoo Park
0
0
Traditional trajectory planning methods for autonomous vehicles have several limitations. For example, heuristic and explicit simple rules limit generalizability and hinder complex motions. These limitations can be addressed using reinforcement learning-based trajectory planning. However, reinforcement learning suffers from unstable learning, and existing reinforcement learning-based trajectory planning methods do not consider the uncertainties. Thus, this paper, proposes a reinforcement learning-based trajectory planning method for autonomous vehicles. The proposed method involves an iterative reward prediction approach that iteratively predicts expectations of future states. These predicted states are then used to forecast rewards and integrated into the learning process to enhance stability. Additionally, a method is proposed that utilizes uncertainty propagation to make the reinforcement learning agent aware of uncertainties. The proposed method was evaluated using the CARLA simulator. Compared to the baseline methods, the proposed method reduced the collision rate by 60.17 %, and increased the average reward by 30.82 times. A video of the proposed method is available at https://www.youtube.com/watch?v=PfDbaeLfcN4.
5/14/2024
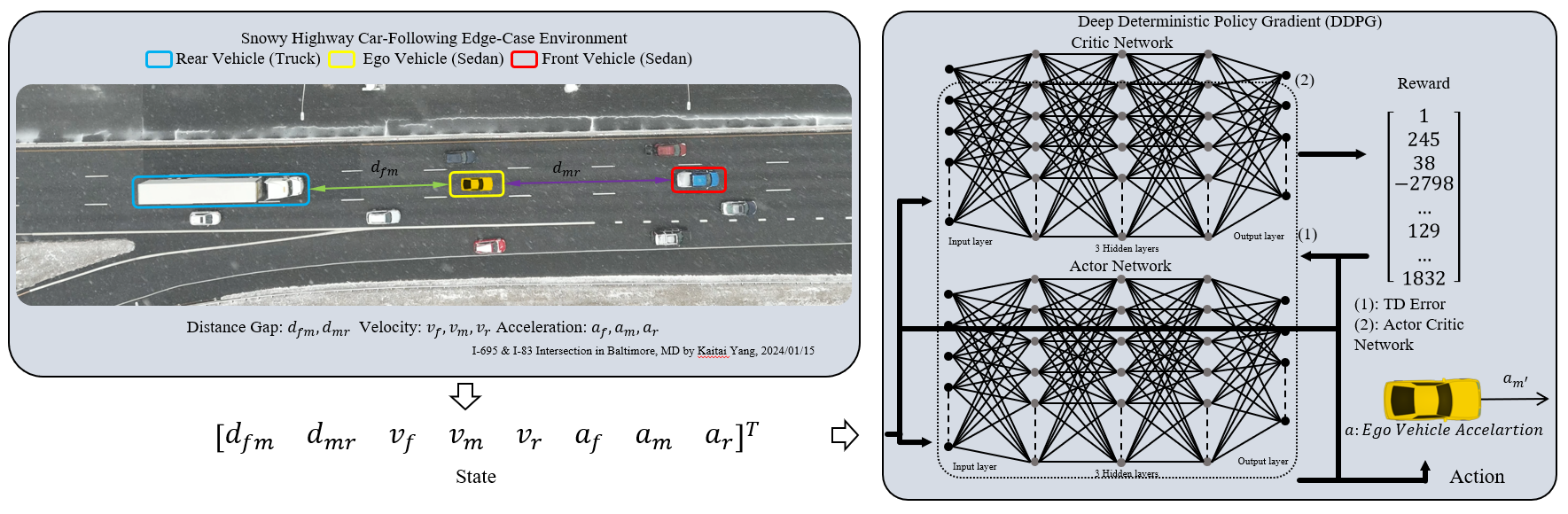
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
0
0
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
5/1/2024
🛸
Sampling-Based Motion Planning with Online Racing Line Generation for Autonomous Driving on Three-Dimensional Race Tracks
Levent Ogretmen, Matthias Rowold, Alexander Langmann, Boris Lohmann
0
0
Existing approaches to trajectory planning for autonomous racing employ sampling-based methods, generating numerous jerk-optimal trajectories and selecting the most favorable feasible trajectory based on a cost function penalizing deviations from an offline-calculated racing line. While successful on oval tracks, these methods face limitations on complex circuits due to the simplistic geometry of jerk-optimal edges failing to capture the complexity of the racing line. Additionally, they only consider two-dimensional tracks, potentially neglecting or surpassing the actual dynamic potential. In this paper, we present a sampling-based local trajectory planning approach for autonomous racing that can maintain the lap time of the racing line even on complex race tracks and consider the race track's three-dimensional effects. In simulative experiments, we demonstrate that our approach achieves lower lap times and improved utilization of dynamic limits compared to existing approaches. We also investigate the impact of online racing line generation, in which the time-optimal solution is planned from the current vehicle state for a limited spatial horizon, in contrast to a closed racing line calculated offline. We show that combining the sampling-based planner with the online racing line generation can significantly reduce lap times in multi-vehicle scenarios.
5/14/2024
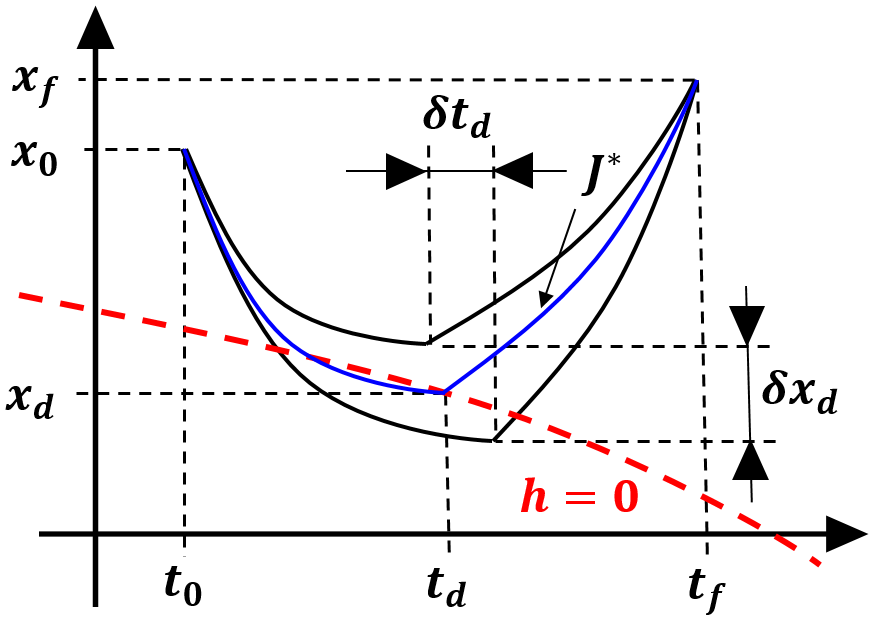
Interaction-Aware Vehicle Motion Planning with Collision Avoidance Constraints in Highway Traffic
Dongryul Kim, Hyeonjeong Kim, Kyoungseok Han
0
0
This paper proposes collision-free optimal trajectory planning for autonomous vehicles in highway traffic, where vehicles need to deal with the interaction among each other. To address this issue, a novel optimal control framework is suggested, which couples the trajectory of surrounding vehicles with collision avoidance constraints. Additionally, we describe a trajectory optimization technique under state constraints, utilizing a planner based on Pontryagin's Minimum Principle, capable of numerically solving collision avoidance scenarios with surrounding vehicles. Simulation results demonstrate the effectiveness of the proposed approach regarding interaction-based motion planning for different scenarios.
4/3/2024