Self-Corrected Multimodal Large Language Model for End-to-End Robot Manipulation

0

Sign in to get full access
Overview
- This paper presents a self-corrected multimodal large language model (SC-MLLM) for end-to-end robot manipulation tasks.
- The model integrates visual and language inputs to enable robots to perform complex manipulation tasks, such as picking up and moving objects.
- The model can self-correct and refine its actions based on feedback, allowing for robust and adaptable task planning.
- The authors demonstrate the model's capabilities on a range of manipulation tasks, including handling exceptional cases.
Plain English Explanation
The researchers have developed a new type of AI model that can control robots to perform complex physical tasks, like picking up and moving objects. This model is unique because it combines two key abilities:
-
Multimodal understanding: The model can take in and understand both visual information (from the robot's cameras) and language instructions (from a human operator). This allows the robot to interpret the full context of a task, just like a human would.
-
Self-correction: If the robot makes a mistake or encounters an unexpected situation, the model can automatically adjust and refine its actions. This helps the robot recover from errors and adapt to changing conditions, making it more robust and reliable.
By having these advanced capabilities, the researchers believe this model can enable robots to handle a wider range of tasks, including more complex and unpredictable scenarios. This could lead to more capable and versatile robots that can assist humans in a variety of settings, from homes to factories.
Technical Explanation
The core innovation of this work is the development of a self-corrected multimodal large language model (SC-MLLM) for end-to-end robot manipulation tasks. The model takes in both visual inputs (from the robot's cameras) and language instructions (from a human operator) to understand the full context of a task.
The authors leverage recent advances in large language models and multimodal perception to build a unified system that can plan and execute complex manipulation actions. Crucially, the model also has the ability to self-correct and refine its actions based on feedback, allowing it to adapt to changing circumstances and handle exceptional cases.
The authors evaluate their model on a range of manipulation tasks, demonstrating its ability to outperform previous state-of-the-art approaches. They also analyze the model's internal representations and decision-making processes to gain insights into how it reasons about grasping and manipulation.
Critical Analysis
The authors present a compelling approach to enabling more capable and adaptable robot manipulation through the use of a self-correcting multimodal language model. However, the paper does not fully address some potential limitations and challenges:
-
Scaling to more complex tasks: While the model demonstrates strong performance on the evaluated tasks, it's unclear how it would scale to more complex, multi-step manipulation sequences or novel task variations.
-
Safety and reliability: The self-correcting ability of the model is a key strength, but the authors do not discuss potential safety concerns or the model's reliability in high-stakes environments.
-
Data efficiency and sample complexity: The training process for the SC-MLLM is not explored in depth, and it's unclear how data-efficient the model is or how much task-specific data would be required to adapt it to new domains.
-
Interpretability and explainability: The analysis of the model's internal representations and decision-making processes is limited, making it difficult to fully understand the reasoning behind its actions.
Despite these potential areas for improvement, the authors have made a significant contribution to the field of robot manipulation by developing a versatile and adaptable model that integrates multimodal perception and language understanding. Further research and refinement of this approach could lead to even more capable and reliable robot systems in the future.
Conclusion
This paper presents a novel self-corrected multimodal large language model (SC-MLLM) for end-to-end robot manipulation tasks. The model's ability to understand both visual and language inputs, as well as its capacity for self-correction and adaptation, represents an important advancement in the field of robotic manipulation.
By combining these key capabilities, the SC-MLLM can enable robots to perform complex tasks more reliably and robustly, potentially leading to a wide range of applications in industries, homes, and beyond. While the paper identifies some areas for further research and improvement, the authors have made a significant contribution to the development of more capable and versatile robot systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Self-Corrected Multimodal Large Language Model for End-to-End Robot Manipulation
Jiaming Liu, Chenxuan Li, Guanqun Wang, Lily Lee, Kaichen Zhou, Sixiang Chen, Chuyan Xiong, Jiaxin Ge, Renrui Zhang, Shanghang Zhang
Robot manipulation policies have shown unsatisfactory action performance when confronted with novel task or object instances. Hence, the capability to automatically detect and self-correct failure action is essential for a practical robotic system. Recently, Multimodal Large Language Models (MLLMs) have shown promise in visual instruction following and demonstrated strong reasoning abilities in various tasks. To unleash general MLLMs as an end-to-end robotic agent, we introduce a Self-Corrected (SC)-MLLM, equipping our model not only to predict end-effector poses but also to autonomously recognize and correct failure actions. Specifically, we first conduct parameter-efficient fine-tuning to empower MLLM with pose prediction ability, which is reframed as a language modeling problem. When facing execution failures, our model learns to identify low-level action error causes (i.e., position and rotation errors) and adaptively seeks prompt feedback from experts. Based on the feedback, SC-MLLM rethinks the current failure scene and generates the corrected actions. Furthermore, we design a continuous policy learning method for successfully corrected samples, enhancing the model's adaptability to the current scene configuration and reducing the frequency of expert intervention. To evaluate our SC-MLLM, we conduct extensive experiments in both simulation and real-world settings. SC-MLLM agent significantly improve manipulation accuracy compared to previous state-of-the-art robotic MLLM (ManipLLM), increasing from 57% to 79% on seen object categories and from 47% to 69% on unseen novel categories.
Read more5/28/2024
0
AIC MLLM: Autonomous Interactive Correction MLLM for Robust Robotic Manipulation
Chuyan Xiong, Chengyu Shen, Xiaoqi Li, Kaichen Zhou, Jiaming Liu, Ruiping Wang, Hao Dong
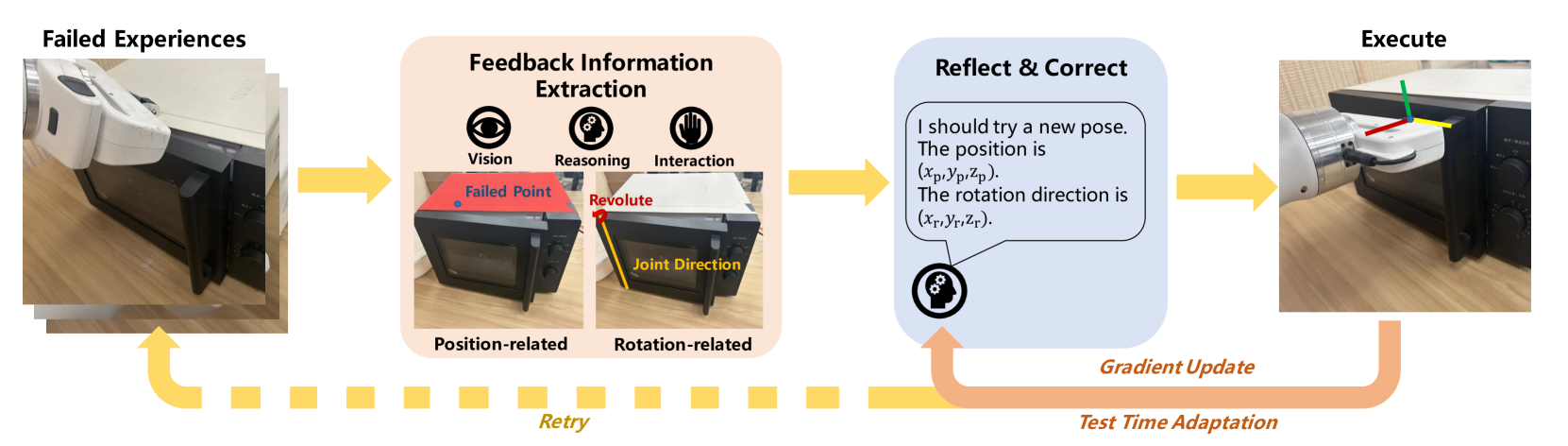
The ability to reflect on and correct failures is crucial for robotic systems to interact stably with real-life objects.Observing the generalization and reasoning capabilities of Multimodal Large Language Models (MLLMs), previous approaches have aimed to utilize these models to enhance robotic systems accordingly.However, these methods typically focus on high-level planning corrections using an additional MLLM, with limited utilization of failed samples to correct low-level contact poses. To address this gap, we propose an Autonomous Interactive Correction (AIC) MLLM, which makes use of previous low-level interaction experiences to correct SE(3) pose predictions. Specifically, AIC MLLM is initially fine-tuned to acquire both pose prediction and feedback prompt comprehension abilities.We carefully design two types of prompt instructions through interactions with objects: 1) visual masks to highlight unmovable parts for position correction, and 2)textual descriptions to indicate potential directions for rotation correction.During inference, a Feedback Information Extraction module is introduced to recognize the failure cause, allowing AIC MLLM to adaptively correct the pose prediction using the corresponding prompts. To further enhance manipulation stability, we devise a Test Time Adaptation strategy that enables AIC MLLM to better adapt to the current scene configuration.Finally, extensive experiments are conducted in both simulated and real-world environments to evaluate the proposed method. The results demonstrate that our AIC MLLM can efficiently correct failure samples by leveraging interaction experience prompts.Real-world demonstration can be found at https://sites.google.com/view/aic-mllm
Read more9/14/2024

0
RoboMamba: Multimodal State Space Model for Efficient Robot Reasoning and Manipulation
Jiaming Liu, Mengzhen Liu, Zhenyu Wang, Lily Lee, Kaichen Zhou, Pengju An, Senqiao Yang, Renrui Zhang, Yandong Guo, Shanghang Zhang
A fundamental objective in robot manipulation is to enable models to comprehend visual scenes and execute actions. Although existing robot Multimodal Large Language Models (MLLMs) can handle a range of basic tasks, they still face challenges in two areas: 1) inadequate reasoning ability to tackle complex tasks, and 2) high computational costs for MLLM fine-tuning and inference. The recently proposed state space model (SSM) known as Mamba demonstrates promising capabilities in non-trivial sequence modeling with linear inference complexity. Inspired by this, we introduce RoboMamba, an end-to-end robotic MLLM that leverages the Mamba model to deliver both robotic reasoning and action capabilities, while maintaining efficient fine-tuning and inference. Specifically, we first integrate the vision encoder with Mamba, aligning visual data with language embedding through co-training, empowering our model with visual common sense and robot-related reasoning. To further equip RoboMamba with action pose prediction abilities, we explore an efficient fine-tuning strategy with a simple policy head. We find that once RoboMamba possesses sufficient reasoning capability, it can acquire manipulation skills with minimal fine-tuning parameters (0.1% of the model) and time (20 minutes). In experiments, RoboMamba demonstrates outstanding reasoning capabilities on general and robotic evaluation benchmarks. Meanwhile, our model showcases impressive pose prediction results in both simulation and real-world experiments, achieving inference speeds 7 times faster than existing robot MLLMs. Our project web page: https://sites.google.com/view/robomamba-web
Read more6/7/2024
📈
0
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
Read more7/2/2024