Semantic-aware Next-Best-View for Multi-DoFs Mobile System in Search-and-Acquisition based Visual Perception

0
🗣️
Sign in to get full access
Overview
- This paper presents a novel approach to efficient visual perception using mobile systems, particularly in complex and unknown environments.
- The approach integrates both visibility gain and semantic gain to select the "Next Best View" for various perception tasks.
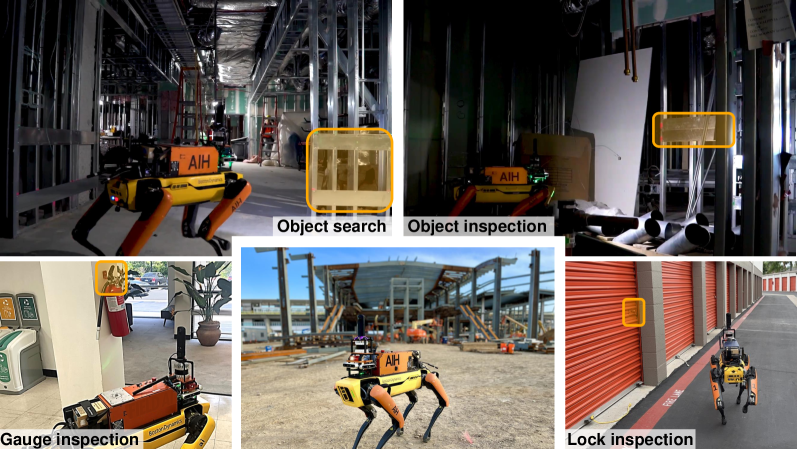
- The system also includes an adaptive strategy with a termination criterion to support a two-stage search-and-acquisition maneuver on multiple objects of interest.
- Several semantically relevant reconstruction metrics are introduced to evaluate the performance of the proposed approach.
Plain English Explanation
Efficient visual perception is crucial in real-world applications, such as search and rescue operations, where quickly and comprehensively identifying objects of interest is essential. However, in complex environments, selecting the "Next Best View" based solely on maximizing visibility may not be optimal. The researchers propose integrating semantic information, which provides a higher-level interpretation of the scene, to guide the selection of the next viewpoint for various perception tasks.
The key idea is to formulate a new information gain that considers both visibility gain and semantic gain. This allows the system to not only maximize the visibility of the objects but also optimize for their semantic relevance. Additionally, the researchers design an adaptive strategy with a termination criterion to support a two-stage search-and-acquisition process using a multi-degree-of-freedom mobile system.
To evaluate the performance of their approach, the researchers introduce several semantically relevant reconstruction metrics, such as perspective directivity and the ratio of the region of interest (ROI) to the full reconstruction volume. These metrics help assess how well the system is able to focus on the semantically relevant parts of the scene.
Technical Explanation
The paper proposes a novel information gain formulation that integrates both visibility gain and semantic gain to select the "Semantic-Aware Next-Best-View" (SA-NBV). Visibility gain is the standard metric used in Next-Best-View (NBV) selection, but the researchers argue that in complex environments, semantics should play a significant role in guiding the selection of the next viewpoint.
The adaptive strategy with a termination criterion supports a two-stage search-and-acquisition maneuver on multiple objects of interest. The first stage focuses on searching for and localizing the objects, while the second stage aims to acquire a detailed view of the objects. This is achieved using a mobile system with multiple degrees of freedom (Multi-DoFs).
To evaluate the performance of the proposed approach, the researchers introduce several semantically relevant reconstruction metrics:
- Perspective Directivity: Measures the degree to which the reconstruction is focused on the semantically relevant parts of the scene.
- ROI-to-full Reconstruction Volume Ratio: Quantifies the ratio of the reconstruction volume focused on the region of interest (ROI) to the overall reconstruction volume.
The simulation experiments demonstrate that the proposed approach outperforms existing methods, achieving improvements of up to 27.13% for the ROI-to-full reconstruction volume ratio and a 0.88234 average perspective directivity. Additionally, the planned motion trajectory exhibits better perceiving coverage towards the target objects.
Critical Analysis
The paper presents a compelling approach to efficient visual perception using mobile systems in complex environments. The integration of semantic information to guide the selection of the "Next Best View" is a valuable contribution, as it addresses the limitations of solely relying on visibility gain.
One potential limitation of the research is the use of simulation experiments, which may not fully capture the nuances of real-world environments. While the simulation results are promising, it would be beneficial to validate the approach in actual physical experiments to assess its performance in more realistic scenarios.
Additionally, the paper does not provide a detailed discussion of the computational complexity and resource requirements of the proposed approach. As mobile systems often have limited computational and power resources, understanding the scalability and efficiency of the algorithm would be important for real-world deployments.
Further research could also explore the integration of the semantic-aware NBV selection with other perception-related techniques, such as object instance retrieval or scene reconstruction, to provide a more comprehensive and robust visual perception solution.
Conclusion
This paper presents a novel approach to efficient visual perception using mobile systems in complex environments. By integrating both visibility gain and semantic gain, the proposed system is able to select the "Semantic-Aware Next-Best-View" to optimize for both the visibility and semantic relevance of the objects of interest. The adaptive strategy with a termination criterion, along with the introduction of semantically relevant reconstruction metrics, demonstrate the advantages of this approach over existing methods.
The research highlights the importance of incorporating semantic information into visual perception tasks, particularly in real-world applications where objects of interest are situated in complex environments. The findings of this study can contribute to the development of more intelligent and effective visual perception systems for a wide range of applications, from search and rescue operations to autonomous navigation and exploration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
Semantic-aware Next-Best-View for Multi-DoFs Mobile System in Search-and-Acquisition based Visual Perception
Xiaotong Yu, Chang-Wen Chen
Efficient visual perception using mobile systems is crucial, particularly in unknown environments such as search and rescue operations, where swift and comprehensive perception of objects of interest is essential. In such real-world applications, objects of interest are often situated in complex environments, making the selection of the 'Next Best' view based solely on maximizing visibility gain suboptimal. Semantics, providing a higher-level interpretation of perception, should significantly contribute to the selection of the next viewpoint for various perception tasks. In this study, we formulate a novel information gain that integrates both visibility gain and semantic gain in a unified form to select the semantic-aware Next-Best-View. Additionally, we design an adaptive strategy with termination criterion to support a two-stage search-and-acquisition manoeuvre on multiple objects of interest aided by a multi-degree-of-freedoms (Multi-DoFs) mobile system. Several semantically relevant reconstruction metrics, including perspective directivity and region of interest (ROI)-to-full reconstruction volume ratio, are introduced to evaluate the performance of the proposed approach. Simulation experiments demonstrate the advantages of the proposed approach over existing methods, achieving improvements of up to 27.13% for the ROI-to-full reconstruction volume ratio and a 0.88234 average perspective directivity. Furthermore, the planned motion trajectory exhibits better perceiving coverage toward the target.
Read more4/26/2024
🛠️
0
Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimization
Dongyu Yan, Jianheng Liu, Fengyu Quan, Haoyao Chen, Mengmeng Fu
Actively planning sensor views during object reconstruction is crucial for autonomous mobile robots. An effective method should be able to strike a balance between accuracy and efficiency. In this paper, we propose a seamless integration of the emerging implicit representation with the active reconstruction task. We build an implicit occupancy field as our geometry proxy. While training, the prior object bounding box is utilized as auxiliary information to generate clean and detailed reconstructions. To evaluate view uncertainty, we employ a sampling-based approach that directly extracts entropy from the reconstructed occupancy probability field as our measure of view information gain. This eliminates the need for additional uncertainty maps or learning. Unlike previous methods that compare view uncertainty within a finite set of candidates, we aim to find the next-best-view (NBV) on a continuous manifold. Leveraging the differentiability of the implicit representation, the NBV can be optimized directly by maximizing the view uncertainty using gradient descent. It significantly enhances the method's adaptability to different scenarios. Simulation and real-world experiments demonstrate that our approach effectively improves reconstruction accuracy and efficiency of view planning in active reconstruction tasks. The proposed system will open source at https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git.
Read more5/29/2024
0
SEEK: Semantic Reasoning for Object Goal Navigation in Real World Inspection Tasks
Muhammad Fadhil Ginting, Sung-Kyun Kim, David D. Fan, Matteo Palieri, Mykel J. Kochenderfer, Ali-akbar Agha-Mohammadi
This paper addresses the problem of object-goal navigation in autonomous inspections in real-world environments. Object-goal navigation is crucial to enable effective inspections in various settings, often requiring the robot to identify the target object within a large search space. Current object inspection methods fall short of human efficiency because they typically cannot bootstrap prior and common sense knowledge as humans do. In this paper, we introduce a framework that enables robots to use semantic knowledge from prior spatial configurations of the environment and semantic common sense knowledge. We propose SEEK (Semantic Reasoning for Object Inspection Tasks) that combines semantic prior knowledge with the robot's observations to search for and navigate toward target objects more efficiently. SEEK maintains two representations: a Dynamic Scene Graph (DSG) and a Relational Semantic Network (RSN). The RSN is a compact and practical model that estimates the probability of finding the target object across spatial elements in the DSG. We propose a novel probabilistic planning framework to search for the object using relational semantic knowledge. Our simulation analyses demonstrate that SEEK outperforms the classical planning and Large Language Models (LLMs)-based methods that are examined in this study in terms of efficiency for object-goal inspection tasks. We validated our approach on a physical legged robot in urban environments, showcasing its practicality and effectiveness in real-world inspection scenarios.
Read more5/17/2024

0
MV-MOS: Multi-View Feature Fusion for 3D Moving Object Segmentation
Jintao Cheng, Xingming Chen, Jinxin Liang, Xiaoyu Tang, Xieyuanli Chen, Dachuan Li
Effectively summarizing dense 3D point cloud data and extracting motion information of moving objects (moving object segmentation, MOS) is crucial to autonomous driving and robotics applications. How to effectively utilize motion and semantic features and avoid information loss during 3D-to-2D projection is still a key challenge. In this paper, we propose a novel multi-view MOS model (MV-MOS) by fusing motion-semantic features from different 2D representations of point clouds. To effectively exploit complementary information, the motion branches of the proposed model combines motion features from both bird's eye view (BEV) and range view (RV) representations. In addition, a semantic branch is introduced to provide supplementary semantic features of moving objects. Finally, a Mamba module is utilized to fuse the semantic features with motion features and provide effective guidance for the motion branches. We validated the effectiveness of the proposed multi-branch fusion MOS framework via comprehensive experiments, and our proposed model outperforms existing state-of-the-art models on the SemanticKITTI benchmark.
Read more8/21/2024