Spatiotemporal-Augmented Graph Neural Networks for Human Mobility Simulation

0

Sign in to get full access
Overview
- The paper proposes a novel Spatiotemporal-Augmented Graph Neural Network (STAGNN) model for simulating human mobility trajectories.
- The model aims to capture both the spatial and temporal dynamics of human mobility, which are crucial for accurate prediction and simulation.
- The authors use a Generative Adversarial Network (GAN) framework to train the model, allowing it to generate realistic mobility patterns.
Plain English Explanation
The research paper introduces a new way to simulate how people move around, called the Spatiotemporal-Augmented Graph Neural Network (STAGNN). This model is designed to capture both the spatial (where people go) and temporal (when they go) aspects of human mobility, which are essential for accurately predicting and simulating people's movements.
The authors use a technique called Generative Adversarial Networks (GANs) to train the STAGNN model. GANs are a type of machine learning algorithm that can generate new, realistic-looking data by pitting two neural networks against each other in a competitive process. In this case, the STAGNN model is trained to generate plausible human mobility trajectories that resemble real-world data.
By combining the spatial and temporal information into a single model, the researchers hope to create a more accurate and comprehensive simulation of how people move around in their daily lives. This could have applications in areas like urban planning, transportation optimization, and disaster response.
Technical Explanation
The Spatiotemporal-Augmented Graph Neural Network (STAGNN) proposed in the paper is a GAN-based model that generates realistic human mobility trajectories. The model consists of two main components: a generator network and a discriminator network.
The generator network takes in a set of initial conditions, such as the starting location and time, and outputs a sequence of locations and timestamps that represent a simulated mobility trajectory. This network is designed to capture the spatial and temporal dynamics of human mobility by incorporating several key elements:
- Spatial-temporal graph neural networks: The model represents the spatial and temporal relationships between locations using a graph structure, where nodes represent locations and edges represent transitions between them.
- Temporal attention mechanisms: The model uses attention-based techniques to selectively focus on relevant temporal information when generating the next location in the trajectory.
- Adversarial training: The generator network is trained in a GAN framework, where a discriminator network tries to distinguish between real and simulated mobility trajectories, forcing the generator to produce more realistic outputs.
The discriminator network takes in a mobility trajectory (real or simulated) and classifies it as either real or fake. This network helps the generator learn to generate trajectories that are indistinguishable from real-world data.
The authors evaluate the STAGNN model on several benchmark datasets and compare its performance to various baselines, including other graph neural network-based models and traditional mobility simulation techniques. The results show that the STAGNN model can generate human mobility trajectories that closely match real-world data, demonstrating its effectiveness in capturing the complex spatiotemporal dynamics of human mobility.
Critical Analysis
The paper presents a compelling approach to human mobility simulation, but it is important to consider some potential limitations and areas for further research:
-
Data Representation: The paper focuses on modeling mobility trajectories as sequences of location-timestamp pairs, which may not capture the full complexity of human movement. Incorporating additional contextual information, such as transportation modes, socioeconomic factors, or points of interest, could further enhance the model's ability to generate realistic mobility patterns.
-
Scalability and Computational Efficiency: The STAGNN model, like many GAN-based approaches, can be computationally expensive to train, especially on large-scale datasets. Exploring more efficient training techniques or alternative model architectures could improve the model's scalability and make it more practical for real-world applications.
-
Generalization and Transferability: The paper evaluates the STAGNN model on a few specific datasets, but it's unclear how well the model would generalize to different geographic regions, cultural contexts, or time periods. Assessing the model's transferability and identifying potential biases in the training data would be important for ensuring the model's broader applicability.
-
Ethical Considerations: Human mobility data can be sensitive and raise privacy concerns. The paper does not discuss how the STAGNN model could be deployed in a way that respects individual privacy and avoids potential misuse of the generated mobility data.
Overall, the STAGNN model represents an exciting advancement in the field of human mobility simulation, but further research and careful consideration of the model's limitations and ethical implications will be important for its successful real-world application.
Conclusion
The Spatiotemporal-Augmented Graph Neural Network (STAGNN) proposed in this paper is a novel approach to simulating human mobility trajectories. By incorporating both spatial and temporal dynamics into a GAN-based framework, the model can generate realistic mobility patterns that closely resemble real-world data.
The STAGNN model's ability to capture the complex interplay between spatial and temporal factors in human movement has the potential to significantly improve various applications, such as urban planning, transportation optimization, and emergency response. However, the paper also highlights the need to address scalability, generalization, and ethical considerations as the research in this field continues to evolve.
As the field of human mobility simulation advances, the STAGNN model represents an important step forward, demonstrating the power of graph neural networks and generative adversarial learning for understanding and simulating the intricate dynamics of human movement.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Spatiotemporal-Augmented Graph Neural Networks for Human Mobility Simulation
Yu Wang, Tongya Zheng, Shunyu Liu, Zunlei Feng, Kaixuan Chen, Yunzhi Hao, Mingli Song
Human mobility patterns have shown significant applications in policy-decision scenarios and economic behavior researches. The human mobility simulation task aims to generate human mobility trajectories given a small set of trajectory data, which have aroused much concern due to the scarcity and sparsity of human mobility data. Existing methods mostly rely on the static relationships of locations, while largely neglect the dynamic spatiotemporal effects of locations. On the one hand, spatiotemporal correspondences of visit distributions reveal the spatial proximity and the functionality similarity of locations. On the other hand, the varying durations in different locations hinder the iterative generation process of the mobility trajectory. Therefore, we propose a novel framework to model the dynamic spatiotemporal effects of locations, namely SpatioTemporal-Augmented gRaph neural networks (STAR). The STAR framework designs various spatiotemporal graphs to capture the spatiotemporal correspondences and builds a novel dwell branch to simulate the varying durations in locations, which is finally optimized in an adversarial manner. The comprehensive experiments over four real datasets for the human mobility simulation have verified the superiority of STAR to state-of-the-art methods. Our code is available at https://github.com/Star607/STAR-TKDE.
Read more6/7/2024
0
STG4Traffic: A Survey and Benchmark of Spatial-Temporal Graph Neural Networks for Traffic Prediction
Xunlian Luo, Chunjiang Zhu, Detian Zhang, Qing Li
Traffic prediction has been an active research topic in the domain of spatial-temporal data mining. Accurate real-time traffic prediction is essential to improve the safety, stability, and versatility of smart city systems, i.e., traffic control and optimal routing. The complex and highly dynamic spatial-temporal dependencies make effective predictions still face many challenges. Recent studies have shown that spatial-temporal graph neural networks exhibit great potential applied to traffic prediction, which combines sequential models with graph convolutional networks to jointly model temporal and spatial correlations. However, a survey study of graph learning, spatial-temporal graph models for traffic, as well as a fair comparison of baseline models are pending and unavoidable issues. In this paper, we first provide a systematic review of graph learning strategies and commonly used graph convolution algorithms. Then we conduct a comprehensive analysis of the strengths and weaknesses of recently proposed spatial-temporal graph network models. Furthermore, we build a study called STG4Traffic using the deep learning framework PyTorch to establish a standardized and scalable benchmark on two types of traffic datasets. We can evaluate their performance by personalizing the model settings with uniform metrics. Finally, we point out some problems in the current study and discuss future directions. Source codes are available at https://github.com/trainingl/STG4Traffic.
Read more6/19/2024
0
Enhancing Sustainable Urban Mobility Prediction with Telecom Data: A Spatio-Temporal Framework Approach
ChungYi Lin, Shen-Lung Tung, Hung-Ting Su, Winston H. Hsu
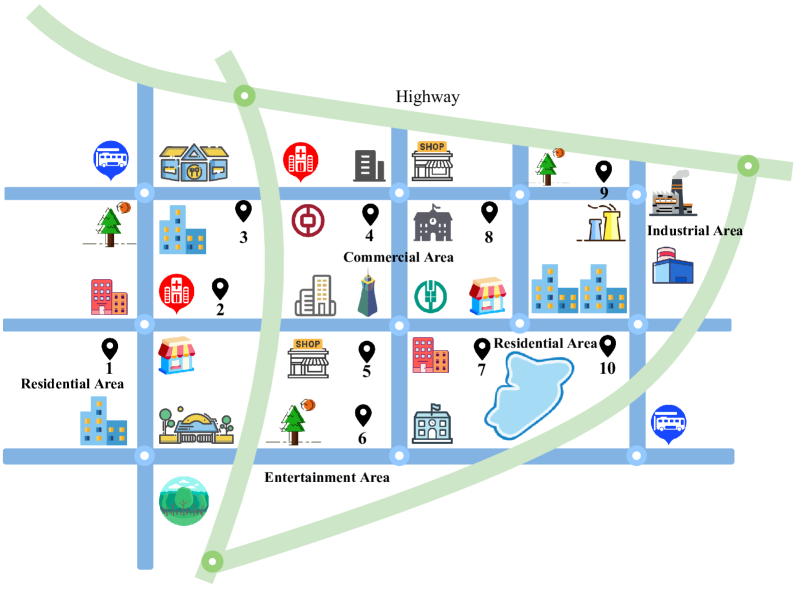
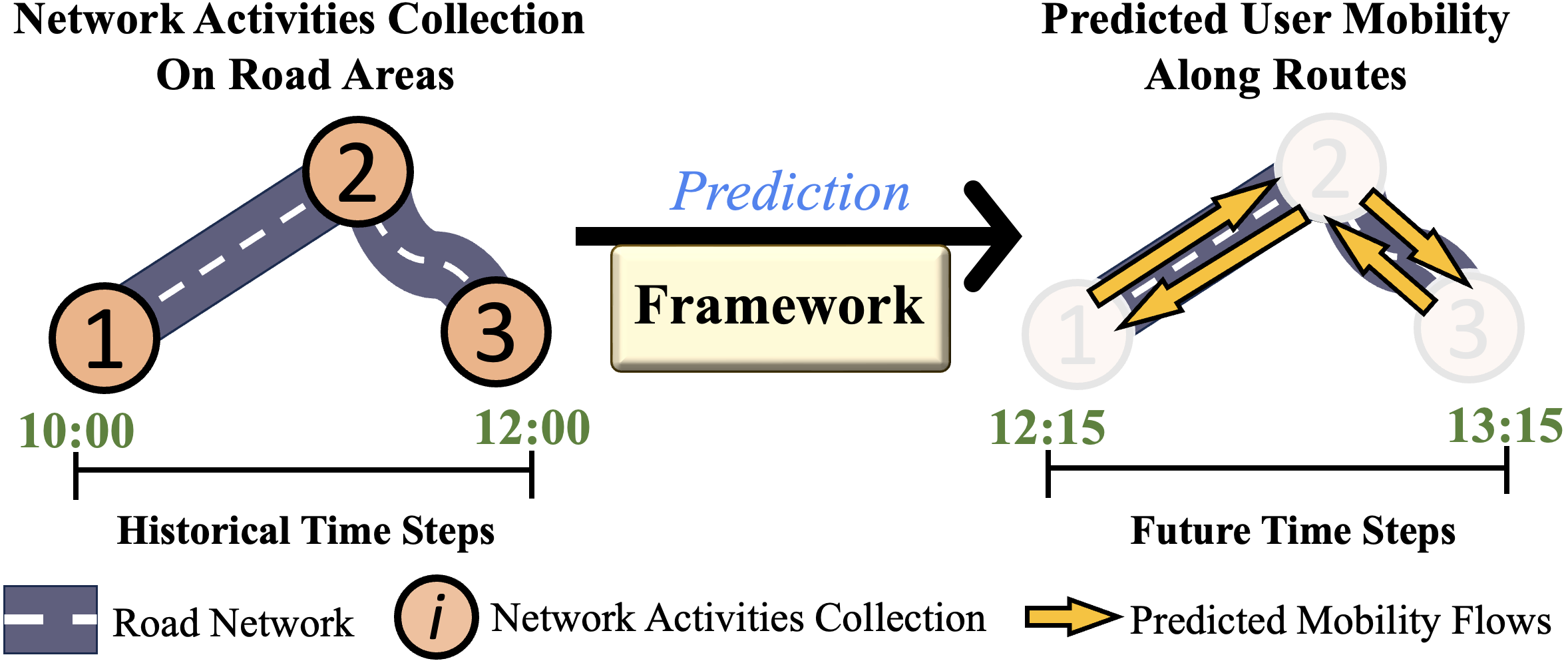
Traditional traffic prediction, limited by the scope of sensor data, falls short in comprehensive traffic management. Mobile networks offer a promising alternative using network activity counts, but these lack crucial directionality. Thus, we present the TeltoMob dataset, featuring undirected telecom counts and corresponding directional flows, to predict directional mobility flows on roadways. To address this, we propose a two-stage spatio-temporal graph neural network (STGNN) framework. The first stage uses a pre-trained STGNN to process telecom data, while the second stage integrates directional and geographic insights for accurate prediction. Our experiments demonstrate the framework's compatibility with various STGNN models and confirm its effectiveness. We also show how to incorporate the framework into real-world transportation systems, enhancing sustainable urban mobility.
Read more5/29/2024
📈
0
MobilityGPT: Enhanced Human Mobility Modeling with a GPT model
Ammar Haydari, Dongjie Chen, Zhengfeng Lai, Michael Zhang, Chen-Nee Chuah
Generative models have shown promising results in capturing human mobility characteristics and generating synthetic trajectories. However, it remains challenging to ensure that the generated geospatial mobility data is semantically realistic, including consistent location sequences, and reflects real-world characteristics, such as constraining on geospatial limits. We reformat human mobility modeling as an autoregressive generation task to address these issues, leveraging the Generative Pre-trained Transformer (GPT) architecture. To ensure its controllable generation to alleviate the above challenges, we propose a geospatially-aware generative model, MobilityGPT. We propose a gravity-based sampling method to train a transformer for semantic sequence similarity. Then, we constrained the training process via a road connectivity matrix that provides the connectivity of sequences in trajectory generation, thereby keeping generated trajectories in geospatial limits. Lastly, we proposed to construct a preference dataset for fine-tuning MobilityGPT via Reinforcement Learning from Trajectory Feedback (RLTF) mechanism, which minimizes the travel distance between training and the synthetically generated trajectories. Experiments on real-world datasets demonstrate MobilityGPT's superior performance over state-of-the-art methods in generating high-quality mobility trajectories that are closest to real data in terms of origin-destination similarity, trip length, travel radius, link, and gravity distributions.
Read more5/24/2024