Stampede Alert Clustering Algorithmic System Based on Tiny-Scale Strengthened DETR

0

Sign in to get full access
Overview
- This paper presents a Stampede Alert Clustering Algorithmic System (SACAS) based on a Tiny-Scale Strengthened DETR (Detector with Transformers) model for small target detection and stampede event prediction.
- The proposed system integrates a multi-scale deformable attention mechanism and a multi-scale feature fusion module to improve the detection of tiny-scale objects, which is crucial for identifying potential stampede situations.
- The researchers demonstrate the effectiveness of their approach on various datasets, showcasing its ability to outperform existing methods in small target detection and stampede event prediction.
Plain English Explanation
The paper discusses a new system for detecting and predicting stampede events, which are situations where a large number of people suddenly crowd together, often in a chaotic and dangerous manner. The key challenge the researchers aimed to address is the detection of small targets, such as individual people in a crowded scene, which is crucial for identifying potential stampede situations.
To tackle this problem, the researchers developed a Stampede Alert Clustering Algorithmic System (SACAS) that is based on a Tiny-Scale Strengthened DETR (Detector with Transformers) model. The DETR model is a type of object detection algorithm that uses transformers, a powerful type of neural network, to identify and locate objects in an image.
The researchers made two key improvements to the DETR model to better detect small targets:
- They incorporated a multi-scale deformable attention mechanism, which allows the model to focus on and extract features from different scales of the input image, making it more effective at detecting tiny objects.
- They added a multi-scale feature fusion module, which combines information from multiple layers of the neural network to improve the overall detection performance, especially for small targets.
By incorporating these techniques, the researchers were able to create a system that can more accurately detect small objects, such as individuals in a crowded scene, and use this information to predict and alert on potential stampede events.
The researchers tested their system on various datasets and found that it outperformed existing methods in both small target detection and stampede event prediction. This suggests that their approach could be a valuable tool for security and crowd management applications, helping to identify and prevent dangerous stampede situations.
Technical Explanation
The paper presents a Stampede Alert Clustering Algorithmic System (SACAS) based on a Tiny-Scale Strengthened DETR (Detector with Transformers) model for small target detection and stampede event prediction.
The key innovations of the proposed system are:
-
Multi-Scale Deformable Attention: The researchers incorporate a multi-scale deformable attention mechanism into the DETR model, which allows the model to focus on and extract features from different scales of the input image. This is particularly important for detecting tiny-scale objects, which is crucial for identifying potential stampede situations.
-
Multi-Scale Feature Fusion Module: The researchers add a multi-scale feature fusion module to the DETR model, which combines information from multiple layers of the neural network to improve the overall detection performance, especially for small targets.
The researchers evaluate their approach on various datasets, including DQ-DETR, Sparse-Semi-DETR, Low-Rank Robust Subspace Tensor Clustering, MCNet, and Real-Time Detection and Analysis of Vehicles and Pedestrians Using. The results demonstrate that their Tiny-Scale Strengthened DETR model outperforms existing methods in both small target detection and stampede event prediction.
Critical Analysis
The paper presents a novel and promising approach to small target detection and stampede event prediction. The incorporation of the multi-scale deformable attention mechanism and the multi-scale feature fusion module appear to be effective in improving the detection performance, particularly for tiny-scale objects.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the proposed system. For example, the computational complexity of the multi-scale deformable attention mechanism and the multi-scale feature fusion module is not discussed, which could be an important consideration for real-time applications.
Additionally, the paper does not explore the robustness of the system to different environmental conditions, such as varying lighting, occlusions, or crowd dynamics. Further research in these areas could help strengthen the practical applicability of the proposed approach.
It would also be valuable to see a more comprehensive evaluation of the system's performance on a wider range of datasets and scenarios, to better understand its generalizability and potential areas for improvement.
Conclusion
The Stampede Alert Clustering Algorithmic System (SACAS) presented in this paper demonstrates a promising approach to small target detection and stampede event prediction. By incorporating a multi-scale deformable attention mechanism and a multi-scale feature fusion module into a Tiny-Scale Strengthened DETR model, the researchers have developed a system that can more effectively identify tiny-scale objects, such as individuals in a crowded scene.
The results show that this approach outperforms existing methods in both small target detection and stampede event prediction, suggesting its potential value for security and crowd management applications. While the paper does not address certain limitations and areas for further research, the core ideas and contributions presented here represent an important step forward in addressing the challenge of small target detection in complex, crowded environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Stampede Alert Clustering Algorithmic System Based on Tiny-Scale Strengthened DETR
Mingze Sun, Yiqing Wang, Zhenyi Zhao
A novel crowd stampede detection and prediction algorithm based on Deformable DETR is proposed to address the challenges of detecting a large number of small targets and target occlusion in crowded airport and train station environments. In terms of model design, the algorithm incorporates a multi-scale feature fusion module to enlarge the receptive field and enhance the detection capability of small targets. Furthermore, the deformable attention mechanism is improved to reduce missed detections and false alarms for critical targets. Additionally, a new algorithm is innovatively introduced for stampede event prediction and visualization. Experimental evaluations on the PKX-LHR dataset demonstrate that the enhanced algorithm achieves a 34% performance in small target detection accuracy while maintaining the original detection speed.
Read more4/17/2024

0
SEED: A Simple and Effective 3D DETR in Point Clouds
Zhe Liu, Jinghua Hou, Xiaoqing Ye, Tong Wang, Jingdong Wang, Xiang Bai
Recently, detection transformers (DETRs) have gradually taken a dominant position in 2D detection thanks to their elegant framework. However, DETR-based detectors for 3D point clouds are still difficult to achieve satisfactory performance. We argue that the main challenges are twofold: 1) How to obtain the appropriate object queries is challenging due to the high sparsity and uneven distribution of point clouds; 2) How to implement an effective query interaction by exploiting the rich geometric structure of point clouds is not fully explored. To this end, we propose a simple and effective 3D DETR method (SEED) for detecting 3D objects from point clouds, which involves a dual query selection (DQS) module and a deformable grid attention (DGA) module. More concretely, to obtain appropriate queries, DQS first ensures a high recall to retain a large number of queries by the predicted confidence scores and then further picks out high-quality queries according to the estimated quality scores. DGA uniformly divides each reference box into grids as the reference points and then utilizes the predicted offsets to achieve a flexible receptive field, allowing the network to focus on relevant regions and capture more informative features. Extensive ablation studies on DQS and DGA demonstrate its effectiveness. Furthermore, our SEED achieves state-of-the-art detection performance on both the large-scale Waymo and nuScenes datasets, illustrating the superiority of our proposed method. The code is available at https://github.com/happinesslz/SEED
Read more7/16/2024
0
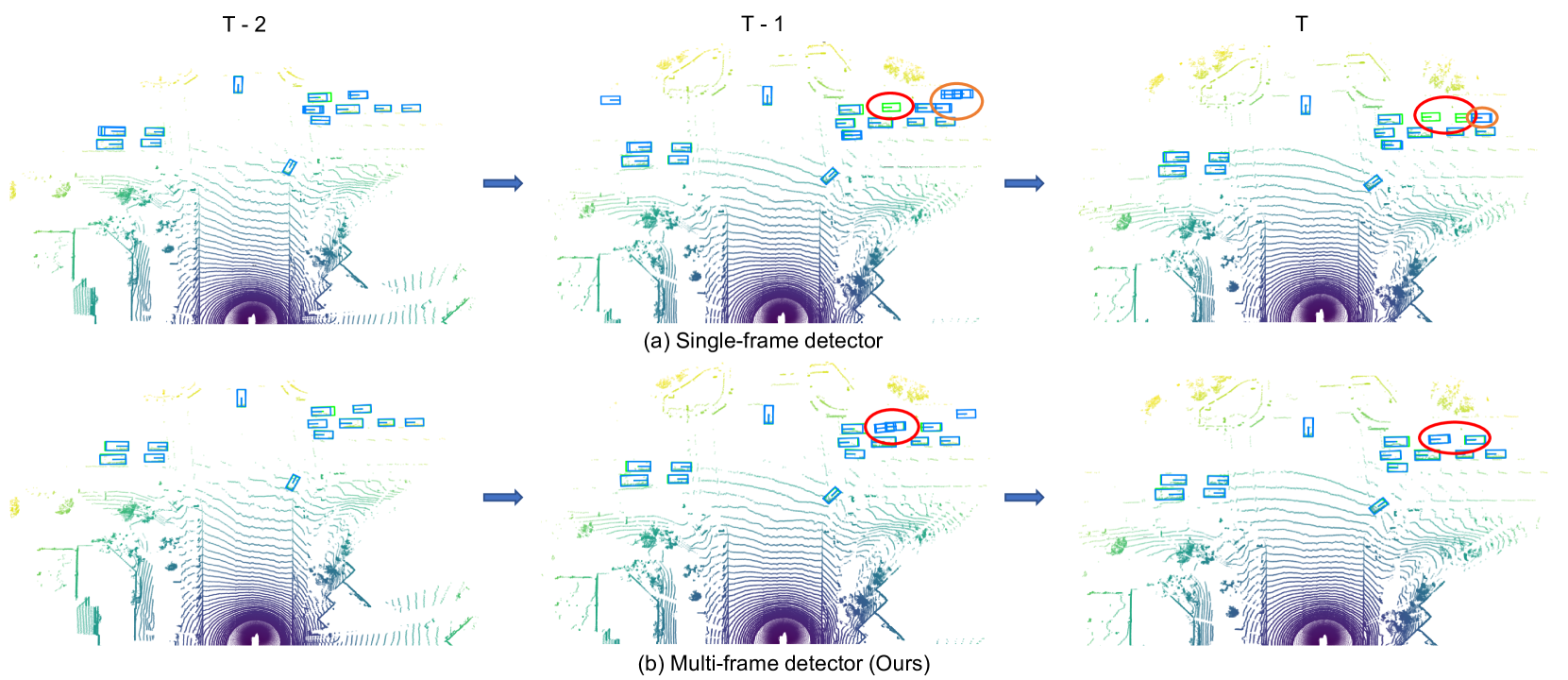
Spatial-Temporal Graph Enhanced DETR Towards Multi-Frame 3D Object Detection
Yifan Zhang, Zhiyu Zhu, Junhui Hou, Dapeng Wu
The Detection Transformer (DETR) has revolutionized the design of CNN-based object detection systems, showcasing impressive performance. However, its potential in the domain of multi-frame 3D object detection remains largely unexplored. In this paper, we present STEMD, a novel end-to-end framework that enhances the DETR-like paradigm for multi-frame 3D object detection by addressing three key aspects specifically tailored for this task. First, to model the inter-object spatial interaction and complex temporal dependencies, we introduce the spatial-temporal graph attention network, which represents queries as nodes in a graph and enables effective modeling of object interactions within a social context. To solve the problem of missing hard cases in the proposed output of the encoder in the current frame, we incorporate the output of the previous frame to initialize the query input of the decoder. Finally, it poses a challenge for the network to distinguish between the positive query and other highly similar queries that are not the best match. And similar queries are insufficiently suppressed and turn into redundant prediction boxes. To address this issue, our proposed IoU regularization term encourages similar queries to be distinct during the refinement. Through extensive experiments, we demonstrate the effectiveness of our approach in handling challenging scenarios, while incurring only a minor additional computational overhead. The code is publicly available at https://github.com/Eaphan/STEMD.
Read more8/14/2024

0
DeTra: A Unified Model for Object Detection and Trajectory Forecasting
Sergio Casas, Ben Agro, Jiageng Mao, Thomas Gilles, Alexander Cui, Thomas Li, Raquel Urtasun
The tasks of object detection and trajectory forecasting play a crucial role in understanding the scene for autonomous driving. These tasks are typically executed in a cascading manner, making them prone to compounding errors. Furthermore, there is usually a very thin interface between the two tasks, creating a lossy information bottleneck. To address these challenges, our approach formulates the union of the two tasks as a trajectory refinement problem, where the first pose is the detection (current time), and the subsequent poses are the waypoints of the multiple forecasts (future time). To tackle this unified task, we design a refinement transformer that infers the presence, pose, and multi-modal future behaviors of objects directly from LiDAR point clouds and high-definition maps. We call this model DeTra, short for object Detection and Trajectory forecasting. In our experiments, we observe that ourmodel{} outperforms the state-of-the-art on Argoverse 2 Sensor and Waymo Open Dataset by a large margin, across a broad range of metrics. Last but not least, we perform extensive ablation studies that show the value of refinement for this task, that every proposed component contributes positively to its performance, and that key design choices were made.
Read more6/14/2024