Stochastic Localization via Iterative Posterior Sampling

0
🔗
Sign in to get full access
Overview
- Building upon score-based learning, new interest in stochastic localization techniques has recently emerged.
- These models seek to add noise to a sample from the data distribution through a stochastic process, called the observation process, and then progressively learn a denoiser associated with this dynamic.
- While specific applications have been explored, the use of stochastic localization for sampling from an unnormalized target density has not been extensively studied.
Plain English Explanation
The paper introduces a new technique called Stochastic Localization via Iterative Posterior Sampling (SLIPS) for sampling from complex, multi-modal distributions. This builds on recent advancements in score-based learning and stochastic localization models.
The core idea is to start with a noisy version of the target distribution, then gradually "denoise" it by learning a function that can remove the noise. This allows you to progressively refine the samples and eventually obtain good approximations of the original target distribution.
The authors propose a specific class of observation processes and denoising schedules that make this technique more flexible and widely applicable. They provide a practical algorithm, SLIPS, that uses Markov Chain Monte Carlo methods to estimate the denoiser and generate samples.
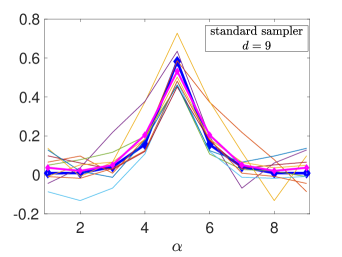
The method is demonstrated on several challenging benchmark problems, including multi-modal Gaussian mixtures, Bayesian logistic regression, and a high-dimensional statistical mechanics system. These examples showcase the benefits of SLIPS in terms of its ability to capture complex, multi-modal distributions.
Technical Explanation
The paper introduces a general stochastic localization framework and an explicit class of observation processes associated with flexible denoising schedules. The authors propose a methodology called Stochastic Localization via Iterative Posterior Sampling (SLIPS) to obtain approximate samples from the target distribution.
SLIPS is based on a Markov Chain Monte Carlo estimation of the denoiser, which is a key component of the stochastic localization process. The authors provide detailed practical guidelines for implementing the SLIPS algorithm.
The paper evaluates the performance of SLIPS on several benchmark problems, including multi-modal Gaussian mixtures, Bayesian logistic regression, and a high-dimensional field system from statistical mechanics. These experiments demonstrate the versatility and effectiveness of the proposed method in capturing complex, multi-modal target distributions.
Critical Analysis
The paper provides a comprehensive framework for using stochastic localization techniques to sample from unnormalized target densities. However, the authors acknowledge that the practical implementation of SLIPS may require careful tuning of hyperparameters and denoising schedules, which could limit its immediate applicability in some real-world scenarios.
Additionally, the paper does not explore the theoretical properties of the SLIPS algorithm in depth, such as its convergence guarantees or the impact of the observation process and denoising schedule on the quality of the samples. Further research in these areas could help strengthen the theoretical foundations of the method.
It would also be valuable to see SLIPS applied to a broader range of applications, particularly in high-dimensional or complex real-world settings, to better understand its strengths, limitations, and potential areas for improvement.
Conclusion
This paper introduces a novel Stochastic Localization via Iterative Posterior Sampling (SLIPS) framework for sampling from complex, multi-modal target distributions. By leveraging stochastic localization techniques and flexible denoising schedules, SLIPS demonstrates promising results on a variety of benchmark problems.
The work contributes to the growing body of research on advanced sampling methods, which have important implications for fields such as Bayesian inference, statistical mechanics, and machine learning. Further development and exploration of SLIPS and related stochastic localization techniques could lead to significant advancements in our ability to effectively model and understand complex, high-dimensional systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
0
Stochastic Localization via Iterative Posterior Sampling
Louis Grenioux, Maxence Noble, Marylou Gabri'e, Alain Oliviero Durmus
Building upon score-based learning, new interest in stochastic localization techniques has recently emerged. In these models, one seeks to noise a sample from the data distribution through a stochastic process, called observation process, and progressively learns a denoiser associated to this dynamics. Apart from specific applications, the use of stochastic localization for the problem of sampling from an unnormalized target density has not been explored extensively. This work contributes to fill this gap. We consider a general stochastic localization framework and introduce an explicit class of observation processes, associated with flexible denoising schedules. We provide a complete methodology, $textit{Stochastic Localization via Iterative Posterior Sampling}$ (SLIPS), to obtain approximate samples of this dynamics, and as a by-product, samples from the target distribution. Our scheme is based on a Markov chain Monte Carlo estimation of the denoiser and comes with detailed practical guidelines. We illustrate the benefits and applicability of SLIPS on several benchmarks of multi-modal distributions, including Gaussian mixtures in increasing dimensions, Bayesian logistic regression and a high-dimensional field system from statistical-mechanics.
Read more5/29/2024
👁️
0
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T. Mccann, Marc L. Klasky, Jong Chul Ye
Diffusion models have been recently studied as powerful generative inverse problem solvers, owing to their high quality reconstructions and the ease of combining existing iterative solvers. However, most works focus on solving simple linear inverse problems in noiseless settings, which significantly under-represents the complexity of real-world problems. In this work, we extend diffusion solvers to efficiently handle general noisy (non)linear inverse problems via approximation of the posterior sampling. Interestingly, the resulting posterior sampling scheme is a blended version of diffusion sampling with the manifold constrained gradient without a strict measurement consistency projection step, yielding a more desirable generative path in noisy settings compared to the previous studies. Our method demonstrates that diffusion models can incorporate various measurement noise statistics such as Gaussian and Poisson, and also efficiently handle noisy nonlinear inverse problems such as Fourier phase retrieval and non-uniform deblurring. Code available at https://github.com/DPS2022/diffusion-posterior-sampling
Read more5/21/2024
0
Localized Schrodinger Bridge Sampler
Georg A. Gottwald, Sebastian Reich
We consider the generative problem of sampling from an unknown distribution for which only a sufficiently large number of training samples are available. In this paper, we build on previous work combining Schrodinger bridges and Langevin dynamics. A key bottleneck of this approach is the exponential dependence of the required training samples on the dimension, $d$, of the ambient state space. We propose a localization strategy which exploits conditional independence of conditional expectation values. Localization thus replaces a single high-dimensional Schrodinger bridge problem by $d$ low-dimensional Schrodinger bridge problems over the available training samples. As for the original approach, the localized sampler is stable and geometric ergodic. The sampler also naturally extends to conditional sampling and to Bayesian inference. We demonstrate the performance of our proposed scheme through experiments on a Gaussian problem with increasing dimensions and on a stochastic subgrid-scale parametrization conditional sampling problem.
Read more9/14/2024
🤷
0
An Adaptive Importance Sampling for Locally Stable Point Processes
Hee-Geon Kang, Sunggon Kim
The problem of finding the expected value of a statistic of a locally stable point process in a bounded region is addressed. We propose an adaptive importance sampling for solving the problem. In our proposal, we restrict the importance point process to the family of homogeneous Poisson point processes, which enables us to generate quickly independent samples of the importance point process. The optimal intensity of the importance point process is found by applying the cross-entropy minimization method. In the proposed scheme, the expected value of the function and the optimal intensity are iteratively estimated in an adaptive manner. We show that the proposed estimator converges to the target value almost surely, and prove the asymptotic normality of it. We explain how to apply the proposed scheme to the estimation of the intensity of a stationary pairwise interaction point process. The performance of the proposed scheme is compared numerically with the Markov chain Monte Carlo simulation and the perfect sampling.
Read more8/15/2024