Team Coordination on Graphs: Problem, Analysis, and Algorithms

0

Sign in to get full access
Overview
- This research paper explores the problem of team coordination on graphs, including analysis and algorithms.
- The paper provides a formal definition of the team coordination problem and presents various algorithmic approaches for solving it.
- The research aims to advance the understanding and development of multi-agent coordination systems, which have applications in areas like robotics, transportation, and logistics.
Plain English Explanation
The paper focuses on the challenge of coordinating a team of agents that need to work together to accomplish a task. This is a common problem in fields like robotics and logistics, where a group of autonomous agents must coordinate their actions to efficiently complete a shared objective.
The researchers model this coordination problem using a graph, where each agent is represented as a node and the connections between them represent their ability to communicate or influence each other. They then explore different algorithms that the agents can use to plan their actions in a coordinated way, taking into account the structure of the graph and the constraints of the problem.
The goal is to develop more effective and scalable multi-agent coordination systems that can be applied to a wide range of real-world scenarios, from autonomous vehicles to warehouse logistics.
Technical Explanation
The paper formally defines the team coordination problem on graphs, where a set of agents must coordinate their actions to achieve a shared objective. The agents are represented as nodes in a graph, and the edges between them represent the ability to communicate or influence each other.
The researchers present several algorithmic approaches for solving this problem, including:
- Centralized Coordination: A central controller gathers information about the entire system and makes decisions for all agents.
- Distributed Coordination: Agents make decisions independently based on local information and communication with their neighbors.
- Hybrid Coordination: A combination of centralized and distributed approaches, where some agents are designated as leaders to coordinate the actions of others.
The paper analyzes the theoretical properties of these algorithms, such as their computational complexity, communication requirements, and the quality of the solutions they produce. The researchers also evaluate the performance of the algorithms through simulations and experiments, comparing them on various metrics like task completion time and energy efficiency.
Critical Analysis
The paper provides a comprehensive exploration of the team coordination problem on graphs and presents several promising algorithmic approaches. However, the researchers acknowledge that the problem is inherently complex, and there are still many open challenges and limitations to be addressed:
- The centralized coordination approach may not scale well to large-scale systems with many agents, due to the computational and communication overhead.
- The distributed coordination approach may be more scalable, but it can be challenging to ensure global coordination and optimality when agents make decisions based on limited local information.
- The hybrid coordination approach aims to balance the advantages of both centralized and distributed methods, but the design of the leader-follower relationships and the distribution of decision-making authority can be difficult to optimize.
The paper also suggests several directions for future research, such as incorporating real-world constraints, dynamic environments, and uncertainty into the coordination problem formulation, as well as exploring learning-based approaches that can adapt to changing conditions.
Conclusion
This research paper presents a comprehensive analysis of the team coordination problem on graphs, including formal problem definitions, algorithmic approaches, and theoretical and experimental evaluations. The findings contribute to the ongoing efforts to develop more effective and scalable multi-agent coordination systems, which have numerous applications in fields like robotics, transportation, and logistics.
While the paper provides valuable insights and advances the state of the art, there are still significant challenges and open questions that warrant further investigation. Continued research in this area has the potential to unlock new possibilities for intelligent, collaborative systems that can tackle complex real-world problems more efficiently and effectively.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Team Coordination on Graphs: Problem, Analysis, and Algorithms
Yanlin Zhou, Manshi Limbu, Gregory J. Stein, Xuan Wang, Daigo Shishika, Xuesu Xiao
Team Coordination on Graphs with Risky Edges (TCGRE) is a recently emerged problem, in which a robot team collectively reduces graph traversal cost through support from one robot to another when the latter traverses a risky edge. Resembling the traditional Multi-Agent Path Finding (MAPF) problem, both classical and learning-based methods have been proposed to solve TCGRE, however, they lacked either computational efficiency or optimality assurance. In this paper, we reformulate TCGRE as a constrained optimization problem and perform a rigorous mathematical analysis. Our theoretical analysis shows the NP-hardness of TCGRE by reduction from the Maximum 3D Matching problem and that efficient decomposition is a key to tackle this combinatorial optimization problem. Furthermore, we design three classes of algorithms to solve TCGRE, i.e., Joint State Graph (JSG) based, coordination based, and receding-horizon sub-team based solutions. Each of these proposed algorithms enjoy different provable optimality and efficiency characteristics that are demonstrated in our extensive experiments.
Read more8/21/2024

0
Multi-Robot Coordination Induced in Hazardous Environments through an Adversarial Graph-Traversal Game
James Berneburg, Xuan Wang, Xuesu Xiao, Daigo Shishika
This paper presents a game theoretic formulation of a graph traversal problem, with applications to robots moving through hazardous environments in the presence of an adversary, as in military and security applications. The blue team of robots moves in an environment modeled by a time-varying graph, attempting to reach some goal with minimum cost, while the red team controls how the graph changes to maximize the cost. The problem is formulated as a stochastic game, so that Nash equilibrium strategies can be computed numerically. Bounds are provided for the game value, with a guarantee that it solves the original problem. Numerical simulations demonstrate the results and the effectiveness of this method, particularly showing the benefit of mixing actions for both players, as well as beneficial coordinated behavior, where blue robots split up and/or synchronize to traverse risky edges.
Read more9/14/2024
0
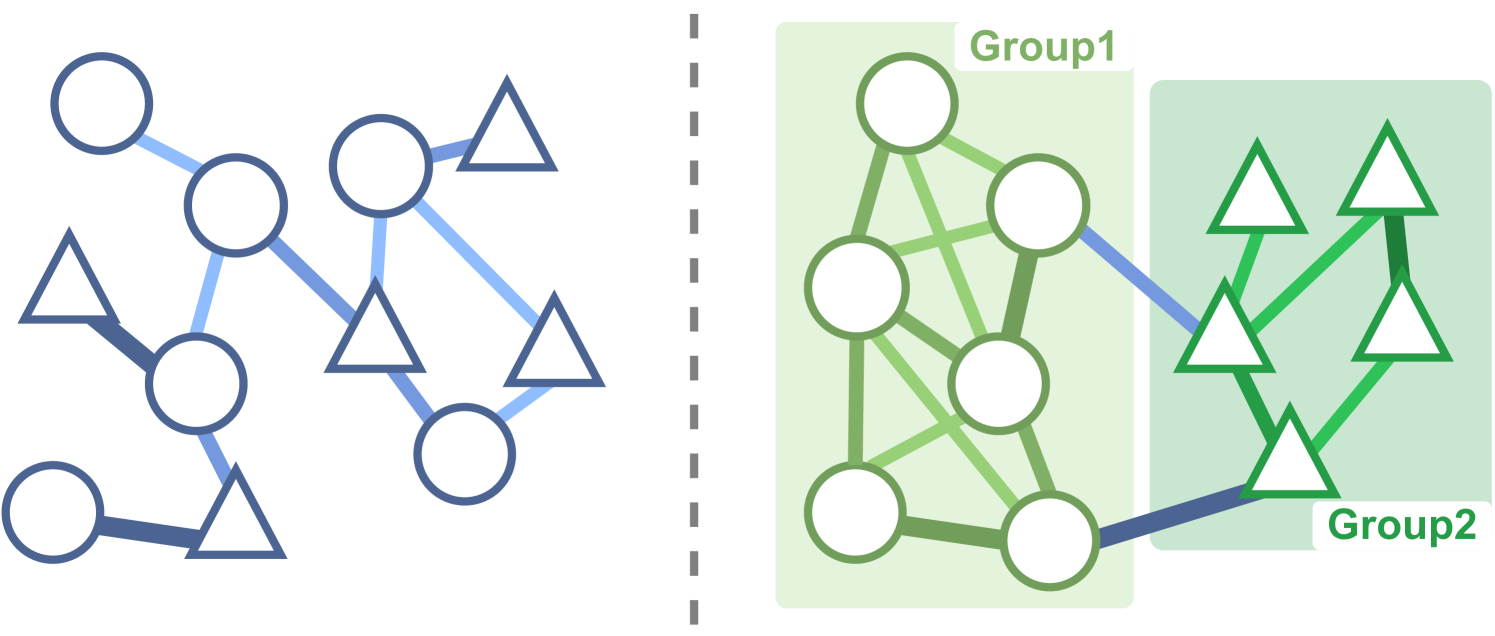
Group-Aware Coordination Graph for Multi-Agent Reinforcement Learning
Wei Duan, Jie Lu, Junyu Xuan
Cooperative Multi-Agent Reinforcement Learning (MARL) necessitates seamless collaboration among agents, often represented by an underlying relation graph. Existing methods for learning this graph primarily focus on agent-pair relations, neglecting higher-order relationships. While several approaches attempt to extend cooperation modelling to encompass behaviour similarities within groups, they commonly fall short in concurrently learning the latent graph, thereby constraining the information exchange among partially observed agents. To overcome these limitations, we present a novel approach to infer the Group-Aware Coordination Graph (GACG), which is designed to capture both the cooperation between agent pairs based on current observations and group-level dependencies from behaviour patterns observed across trajectories. This graph is further used in graph convolution for information exchange between agents during decision-making. To further ensure behavioural consistency among agents within the same group, we introduce a group distance loss, which promotes group cohesion and encourages specialization between groups. Our evaluations, conducted on StarCraft II micromanagement tasks, demonstrate GACG's superior performance. An ablation study further provides experimental evidence of the effectiveness of each component of our method.
Read more5/14/2024

0
Collaborative Graph Exploration with Reduced Pose-SLAM Uncertainty via Submodular Optimization
Ruofei Bai, Shenghai Yuan, Hongliang Guo, Pengyu Yin, Wei-Yun Yau, Lihua Xie
This paper considers the collaborative graph exploration problem in GPS-denied environments, where a group of robots are required to cover a graph environment while maintaining reliable pose estimations in collaborative simultaneous localization and mapping (SLAM). Considering both objectives presents challenges for multi-robot pathfinding, as it involves the expensive covariance inference for SLAM uncertainty evaluation, especially considering various combinations of robots' paths. To reduce the computational complexity, we propose an efficient two-stage strategy where exploration paths are first generated for quick coverage, and then enhanced by adding informative and distance-efficient loop-closing actions, called loop edges, along the paths for reliable pose estimation. We formulate the latter problem as a non-monotone submodular maximization problem by relating SLAM uncertainty with pose graph topology, which (1) facilitates more efficient evaluation of SLAM uncertainty than covariance inference, and (2) allows the application of approximation algorithms in submodular optimization to provide optimality guarantees. We further introduce the ordering heuristics to improve objective values while preserving the optimality bound. Simulation experiments over randomly generated graph environments verify the efficiency of our methods in finding paths for quick coverage and enhanced pose graph reliability, and benchmark the performance of the approximation algorithms and the greedy-based algorithm in the loop edge selection problem. Our implementations will be open-source at https://github.com/bairuofei/CGE.
Read more7/2/2024