Transformer Based Planning in the Observation Space with Applications to Trick Taking Card Games
2404.13150
0
0
Abstract
Traditional search algorithms have issues when applied to games of imperfect information where the number of possible underlying states and trajectories are very large. This challenge is particularly evident in trick-taking card games. While state sampling techniques such as Perfect Information Monte Carlo (PIMC) search has shown success in these contexts, they still have major limitations. We present Generative Observation Monte Carlo Tree Search (GO-MCTS), which utilizes MCTS on observation sequences generated by a game specific model. This method performs the search within the observation space and advances the search using a model that depends solely on the agent's observations. Additionally, we demonstrate that transformers are well-suited as the generative model in this context, and we demonstrate a process for iteratively training the transformer via population-based self-play. The efficacy of GO-MCTS is demonstrated in various games of imperfect information, such as Hearts, Skat, and The Crew: The Quest for Planet Nine, with promising results.
Create account to get full access
Overview
- This paper presents a novel approach to planning in the observation space using transformer models, with applications to trick-taking card games.
- The researchers develop a method that combines transformer-based models for decision-making with Monte Carlo tree search techniques to enable efficient planning and exploration in complex environments.
- The proposed approach is evaluated on several trick-taking card game environments, demonstrating strong performance compared to existing methods.
Plain English Explanation
The paper describes a new way to help AI systems make decisions in complex, dynamic environments, using trick-taking card games as a test case. Trick-taking card games, like Bridge or Spades, involve a lot of hidden information and complex strategic considerations, making them challenging for AI to master.
The key idea is to use a type of AI model called a transformer, which is good at processing and understanding sequences of information, like the cards played in a trick-taking game. The researchers combine the transformer model with a technique called Monte Carlo tree search, which allows the AI to explore different possible moves and outcomes to find the best strategy.
By planning in the "observation space" - focusing on the current state of the game rather than trying to model the full game dynamics - the researchers are able to develop an efficient and effective decision-making system. This allows the AI to handle the uncertainty and partial information inherent in trick-taking games, outperforming previous approaches.
The results demonstrate the potential of this technique not just for game-playing, but for real-world planning and decision-making in complex, dynamic environments where information is incomplete or uncertain. The Transform-Then-Explore and Control-guided Motion Transformer techniques are relevant examples of similar approaches.
Technical Explanation
The paper proposes a novel transformer-based planning approach in the observation space, which is applied to the domain of trick-taking card games. The key components of the method are:
-
Transformer Model: The researchers use a transformer-based model to encode the current game state (the observations) and generate action distributions. This allows the model to effectively capture the complex relationships between the cards played, players' hands, and the game context.
-
Monte Carlo Tree Search (MCTS): To perform efficient planning, the transformer model is integrated with a MCTS algorithm. MCTS explores possible future game states by sampling actions and evaluating their outcomes, allowing the AI to identify promising strategies.
-
Observation-Space Planning: Instead of trying to learn a full model of the game dynamics, the approach focuses on planning directly in the observation space. This avoids the challenges of modeling the hidden information and complex rules of trick-taking games, and allows the AI to make decisions based on the current game state.
The method is evaluated on several popular trick-taking card games, including Spades, Bridge, and Skat. The results show that the transformer-based planning approach outperforms existing techniques, such as value model-based methods and Boltzmann exploration, in terms of win rate and other performance metrics.
Critical Analysis
The paper presents a promising approach for planning in complex, partially observable environments, but there are a few potential limitations and areas for further research:
-
Generalization to Other Domains: While the results on trick-taking card games are impressive, it's unclear how well the method would generalize to other types of planning problems, such as robotics, logistics, or resource allocation. Validating the approach on a wider range of domains would help assess its broader applicability.
-
Computational Efficiency: The use of MCTS, while effective, can be computationally intensive, especially in real-time applications. Exploring ways to improve the efficiency of the planning process, perhaps through thoughtful model revision or other techniques, could make the approach more practical for deployment.
-
Explainability and Interpretability: As with many deep learning-based methods, the transformer model used in this approach may be difficult to interpret and explain. Developing techniques to improve the transparency of the decision-making process could be valuable, especially in domains where human understanding and trust are important.
Overall, the paper demonstrates an innovative and effective approach to planning in complex, partially observable environments, with promising applications in game-playing and beyond. Further research to address the identified limitations could help unlock the full potential of this technique.
Conclusion
This paper presents a novel transformer-based planning approach that operates directly in the observation space, demonstrated on the challenging domain of trick-taking card games. By combining the powerful representational capabilities of transformers with the exploration and optimization of Monte Carlo tree search, the researchers have developed a highly effective decision-making system that outperforms existing methods.
The results highlight the potential of this approach to tackle complex, dynamic planning problems where information is incomplete or uncertain. While further work is needed to assess the generalization and efficiency of the method, this research represents an exciting advancement in the field of AI planning and decision-making, with implications for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

New!Model Predictive Simulation Using Structured Graphical Models and Transformers
Xinghua Lou, Meet Dave, Shrinu Kushagra, Miguel Lazaro-Gredilla, Kevin Murphy
0
0
We propose an approach to simulating trajectories of multiple interacting agents (road users) based on transformers and probabilistic graphical models (PGMs), and apply it to the Waymo SimAgents challenge. The transformer baseline is based on the MTR model, which predicts multiple future trajectories conditioned on the past trajectories and static road layout features. We then improve upon these generated trajectories using a PGM, which contains factors which encode prior knowledge, such as a preference for smooth trajectories, and avoidance of collisions with static obstacles and other moving agents. We perform (approximate) MAP inference in this PGM using the Gauss-Newton method. Finally we sample $K=32$ trajectories for each of the $N sim 100$ agents for the next $T=8 Delta$ time steps, where $Delta=10$ is the sampling rate per second. Following the Model Predictive Control (MPC) paradigm, we only return the first element of our forecasted trajectories at each step, and then we replan, so that the simulation can constantly adapt to its changing environment. We therefore call our approach Model Predictive Simulation or MPS. We show that MPS improves upon the MTR baseline, especially in safety critical metrics such as collision rate. Furthermore, our approach is compatible with any underlying forecasting model, and does not require extra training, so we believe it is a valuable contribution to the community.
7/1/2024
Towards a Characterisation of Monte-Carlo Tree Search Performance in Different Games
Dennis J. N. J. Soemers, Guillaume Bams, Max Persoon, Marco Rietjens, Dimitar Sladi'c, Stefan Stefanov, Kurt Driessens, Mark H. M. Winands
0
0
Many enhancements to Monte-Carlo Tree Search (MCTS) have been proposed over almost two decades of general game playing and other artificial intelligence research. However, our ability to characterise and understand which variants work well or poorly in which games is still lacking. This paper describes work on an initial dataset that we have built to make progress towards such an understanding: 268,386 plays among 61 different agents across 1494 distinct games. We describe a preliminary analysis and work on training predictive models on this dataset, as well as lessons learned and future plans for a new and improved version of the dataset.
6/14/2024

Efficient Monte Carlo Tree Search via On-the-Fly State-Conditioned Action Abstraction
Yunhyeok Kwak, Inwoo Hwang, Dooyoung Kim, Sanghack Lee, Byoung-Tak Zhang
0
0
Monte Carlo Tree Search (MCTS) has showcased its efficacy across a broad spectrum of decision-making problems. However, its performance often degrades under vast combinatorial action space, especially where an action is composed of multiple sub-actions. In this work, we propose an action abstraction based on the compositional structure between a state and sub-actions for improving the efficiency of MCTS under a factored action space. Our method learns a latent dynamics model with an auxiliary network that captures sub-actions relevant to the transition on the current state, which we call state-conditioned action abstraction. Notably, it infers such compositional relationships from high-dimensional observations without the known environment model. During the tree traversal, our method constructs the state-conditioned action abstraction for each node on-the-fly, reducing the search space by discarding the exploration of redundant sub-actions. Experimental results demonstrate the superior sample efficiency of our method compared to vanilla MuZero, which suffers from expansive action space.
6/4/2024
Improving GFlowNets with Monte Carlo Tree Search
Nikita Morozov, Daniil Tiapkin, Sergey Samsonov, Alexey Naumov, Dmitry Vetrov
0
0
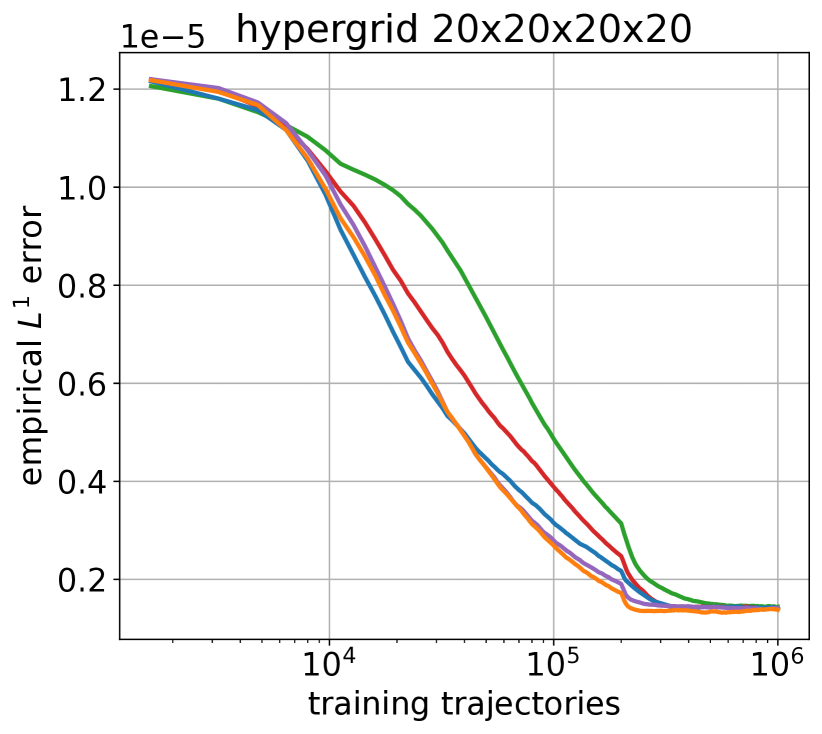
Generative Flow Networks (GFlowNets) treat sampling from distributions over compositional discrete spaces as a sequential decision-making problem, training a stochastic policy to construct objects step by step. Recent studies have revealed strong connections between GFlowNets and entropy-regularized reinforcement learning. Building on these insights, we propose to enhance planning capabilities of GFlowNets by applying Monte Carlo Tree Search (MCTS). Specifically, we show how the MENTS algorithm (Xiao et al., 2019) can be adapted for GFlowNets and used during both training and inference. Our experiments demonstrate that this approach improves the sample efficiency of GFlowNet training and the generation fidelity of pre-trained GFlowNet models.
6/21/2024