Transformer in Touch: A Survey

0
🔄
Sign in to get full access
Overview
- The Transformer model, initially successful in natural language processing, has shown great potential in tactile perception applications.
- This review aims to outline the application and development of Transformers in tactile technology.
- Key concepts behind the success of the Transformer are the self-attention mechanism and large-scale pre-training.
- The review covers the application of Transformers in various tactile tasks, including object recognition, cross-modal generation, and object manipulation.
- The paper suggests potential areas for further research to generate more interest and tackle existing challenges in the tactile field.
Plain English Explanation
The Transformer model has been very successful in natural language processing, and researchers are now exploring how it can be used for tactile perception. Tactile perception is the sense of touch, which is an important part of how we interact with the world around us.
The key ideas behind the Transformer model's success are the self-attention mechanism and large-scale pre-training. Self-attention allows the model to focus on the most relevant parts of the input, while pre-training on large datasets helps the model learn general patterns.
This review looks at how Transformers are being used for different tactile tasks, such as recognizing objects, generating new tactile information, and manipulating objects. The review summarizes the key methods, performance results, and design highlights for these applications.
The paper also suggests areas for further research, such as predicting tactile information and remote tactile sensing. Encouraging more research in this area could lead to new ways of interacting with and understanding the world through touch.
Technical Explanation
The review begins by introducing the two fundamental concepts behind the success of the Transformer: the self-attention mechanism and large-scale pre-training. The self-attention mechanism allows the Transformer to focus on the most relevant parts of the input, while pre-training on large datasets helps the model learn general patterns that can be applied to a variety of tasks.
The paper then delves into the application of Transformers in various tactile tasks. For object recognition, the review discusses how Transformers can be used to combine audio and visual information with tactile data to improve object identification. In the area of cross-modal generation, the review highlights research on generating tactile information from language and predicting tactile feedback for robotic manipulation. The review also covers the use of Transformers for predicting and understanding tactile events, such as slip, which is important for object manipulation.
The paper concludes by suggesting potential areas for further research, such as remote tactile sensing, in order to generate more interest, tackle existing challenges, and encourage the use of Transformer models in the tactile field.
Critical Analysis
The review provides a comprehensive overview of the current state of Transformer models in tactile perception applications, highlighting both the successes and the areas for further research. One potential limitation noted is the need for larger and more diverse tactile datasets to fully leverage the power of pre-training techniques.
Additionally, the review could have delved deeper into the specific architectural choices and training procedures used in the various Transformer-based tactile applications. More discussion of the trade-offs and design considerations behind these choices would have been helpful for readers interested in implementing these techniques.
While the review suggests several promising directions for future research, it could have also acknowledged any potential ethical or societal implications of advancing tactile perception technology, such as privacy concerns or the impact on certain industries or jobs.
Overall, the review serves as a useful introduction to the exciting applications of Transformer models in the tactile domain, and encourages readers to think critically about the ongoing challenges and opportunities in this rapidly evolving field.
Conclusion
This review outlines the significant potential of Transformer models in the field of tactile perception, building on their initial success in natural language processing. By highlighting the core concepts behind Transformers and their application to various tactile tasks, the paper demonstrates the versatility and power of this approach.
The review's suggestions for future research directions, such as remote tactile sensing and predicting tactile events, indicate that there is still much work to be done in this area. Continued advancements in Transformer-based tactile perception could lead to new and innovative ways of interacting with and understanding the physical world around us.
Overall, this review serves as a valuable resource for researchers and practitioners interested in exploring the intersection of Transformer models and tactile technology, and provides a solid foundation for further exploration and development in this exciting field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔄
0
Transformer in Touch: A Survey
Jing Gao, Ning Cheng, Bin Fang, Wenjuan Han
The Transformer model, initially achieving significant success in the field of natural language processing, has recently shown great potential in the application of tactile perception. This review aims to comprehensively outline the application and development of Transformers in tactile technology. We first introduce the two fundamental concepts behind the success of the Transformer: the self-attention mechanism and large-scale pre-training. Then, we delve into the application of Transformers in various tactile tasks, including but not limited to object recognition, cross-modal generation, and object manipulation, offering a concise summary of the core methodologies, performance benchmarks, and design highlights. Finally, we suggest potential areas for further research and future work, aiming to generate more interest within the community, tackle existing challenges, and encourage the use of Transformer models in the tactile field.
Read more5/22/2024

0
TextToucher: Fine-Grained Text-to-Touch Generation
Jiahang Tu, Hao Fu, Fengyu Yang, Hanbin Zhao, Chao Zhang, Hui Qian
Tactile sensation plays a crucial role in the development of multi-modal large models and embodied intelligence. To collect tactile data with minimal cost as possible, a series of studies have attempted to generate tactile images by vision-to-touch image translation. However, compared to text modality, visual modality-driven tactile generation cannot accurately depict human tactile sensation. In this work, we analyze the characteristics of tactile images in detail from two granularities: object-level (tactile texture, tactile shape), and sensor-level (gel status). We model these granularities of information through text descriptions and propose a fine-grained Text-to-Touch generation method (TextToucher) to generate high-quality tactile samples. Specifically, we introduce a multimodal large language model to build the text sentences about object-level tactile information and employ a set of learnable text prompts to represent the sensor-level tactile information. To better guide the tactile generation process with the built text information, we fuse the dual grains of text information and explore various dual-grain text conditioning methods within the diffusion transformer architecture. Furthermore, we propose a Contrastive Text-Touch Pre-training (CTTP) metric to precisely evaluate the quality of text-driven generated tactile data. Extensive experiments demonstrate the superiority of our TextToucher method. The source codes will be available at url{https://github.com/TtuHamg/TextToucher}.
Read more9/10/2024

0
Transferable Tactile Transformers for Representation Learning Across Diverse Sensors and Tasks
Jialiang Zhao, Yuxiang Ma, Lirui Wang, Edward H. Adelson
This paper presents T3: Transferable Tactile Transformers, a framework for tactile representation learning that scales across multi-sensors and multi-tasks. T3 is designed to overcome the contemporary issue that camera-based tactile sensing is extremely heterogeneous, i.e. sensors are built into different form factors, and existing datasets were collected for disparate tasks. T3 captures the shared latent information across different sensor-task pairings by constructing a shared trunk transformer with sensor-specific encoders and task-specific decoders. The pre-training of T3 utilizes a novel Foundation Tactile (FoTa) dataset, which is aggregated from several open-sourced datasets and it contains over 3 million data points gathered from 13 sensors and 11 tasks. FoTa is the largest and most diverse dataset in tactile sensing to date and it is made publicly available in a unified format. Across various sensors and tasks, experiments show that T3 pre-trained with FoTa achieved zero-shot transferability in certain sensor-task pairings, can be further fine-tuned with small amounts of domain-specific data, and its performance scales with bigger network sizes. T3 is also effective as a tactile encoder for long horizon contact-rich manipulation. Results from sub-millimeter multi-pin electronics insertion tasks show that T3 achieved a task success rate 25% higher than that of policies trained with tactile encoders trained from scratch, or 53% higher than without tactile sensing. Data, code, and model checkpoints are open-sourced at https://t3.alanz.info.
Read more7/16/2024
0
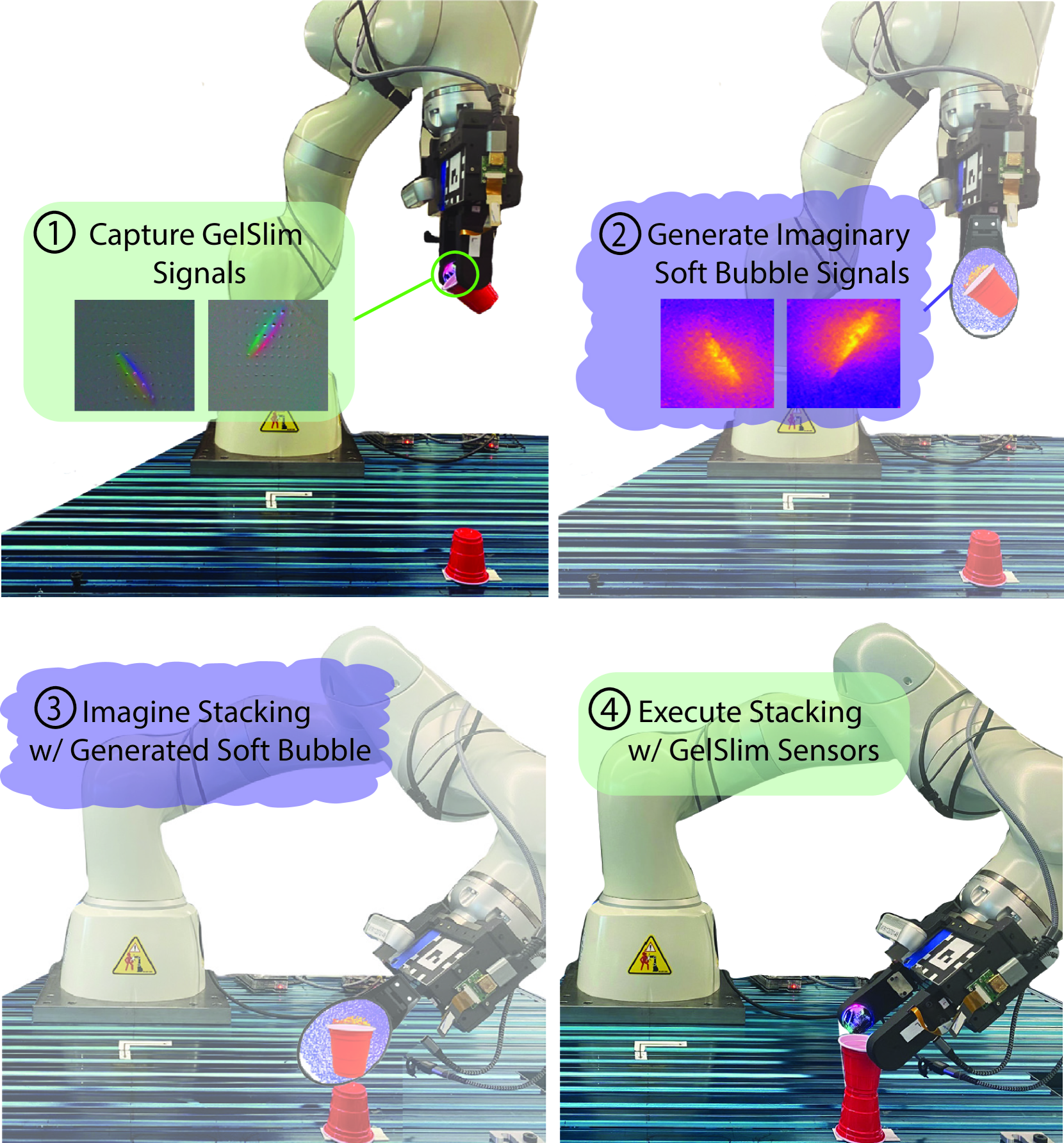
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Samanta Rodriguez, Yiming Dou, Miquel Oller, Andrew Owens, Nima Fazeli
Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.
Read more9/14/2024