Unifying F1TENTH Autonomous Racing: Survey, Methods and Benchmarks

0
Sign in to get full access
Overview
- This paper provides a comprehensive survey of autonomous racing in the F1TENTH racing competition, covering recent research methods and benchmark tasks.
- The authors explore deep reinforcement learning, trajectory optimization, and other techniques used to develop autonomous racing systems.
- The paper aims to unify the F1TENTH domain by establishing common benchmarks and baselines to facilitate progress in this area.
Plain English Explanation
The paper examines the current state of autonomous racing in the F1TENTH competition, which uses small-scale self-driving cars to test and evaluate advanced control and navigation algorithms. The researchers surveyed the existing literature on techniques like deep reinforcement learning and trajectory optimization that have been applied to this problem.
The goal is to establish a common set of benchmarks and best practices for the F1TENTH domain, making it easier for researchers to compare their work and build on each other's progress. This could help accelerate advancements in autonomous driving by providing a standardized testbed for new algorithms and approaches.
Technical Explanation
The paper begins with a comprehensive literature survey of techniques used for autonomous racing, including deep reinforcement learning, model predictive control, and trajec tory optimization. The authors then discuss several key components of an autonomous racing system, such as perception, planning, and control.
To facilitate progress in this area, the researchers propose a set of benchmark tasks and environments for the F1TENTH competition. These include standard racetrack layouts, environmental conditions, and performance metrics. The authors also outline methods for evaluating the robustness and safety of autonomous racing systems, such as dealing with sensor uncertainty and handling off-track situations.
Through this work, the researchers aim to establish a unified framework for autonomous racing research, allowing for more meaningful comparisons and collaborations within the F1TENTH community.
Critical Analysis
The paper provides a comprehensive overview of the current state of autonomous racing research, but it does not delve deeply into the technical details of the various algorithms and methods discussed. While this is understandable given the survey nature of the work, it may limit the usefulness of the paper for researchers already familiar with the field.
Additionally, the proposed benchmark tasks and environments, while valuable, may not fully capture the complexity and variability of real-world racing scenarios. Further work may be needed to develop more realistic and challenging testbeds for autonomous racing systems.
The paper also does not address potential ethical and societal implications of advanced autonomous driving technologies, such as the impact on human drivers and the need for robust safety mechanisms. These are important considerations that should be explored in future research.
Conclusion
This paper serves as a valuable resource for researchers and practitioners working on autonomous racing systems, particularly in the context of the F1TENTH competition. By providing a survey of the existing literature and proposing common benchmarks, the authors hope to unify and accelerate progress in this exciting field of study.
As autonomous driving technologies continue to advance, the insights and methodologies presented in this work could have broader implications for the development of safe and reliable self-driving vehicles. However, ongoing research and critical analysis will be necessary to address the technical, ethical, and societal challenges that arise along the way.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Unifying F1TENTH Autonomous Racing: Survey, Methods and Benchmarks
Benjamin David Evans, Raphael Trumpp, Marco Caccamo, Felix Jahncke, Johannes Betz, Hendrik Willem Jordaan, Herman Arnold Engelbrecht
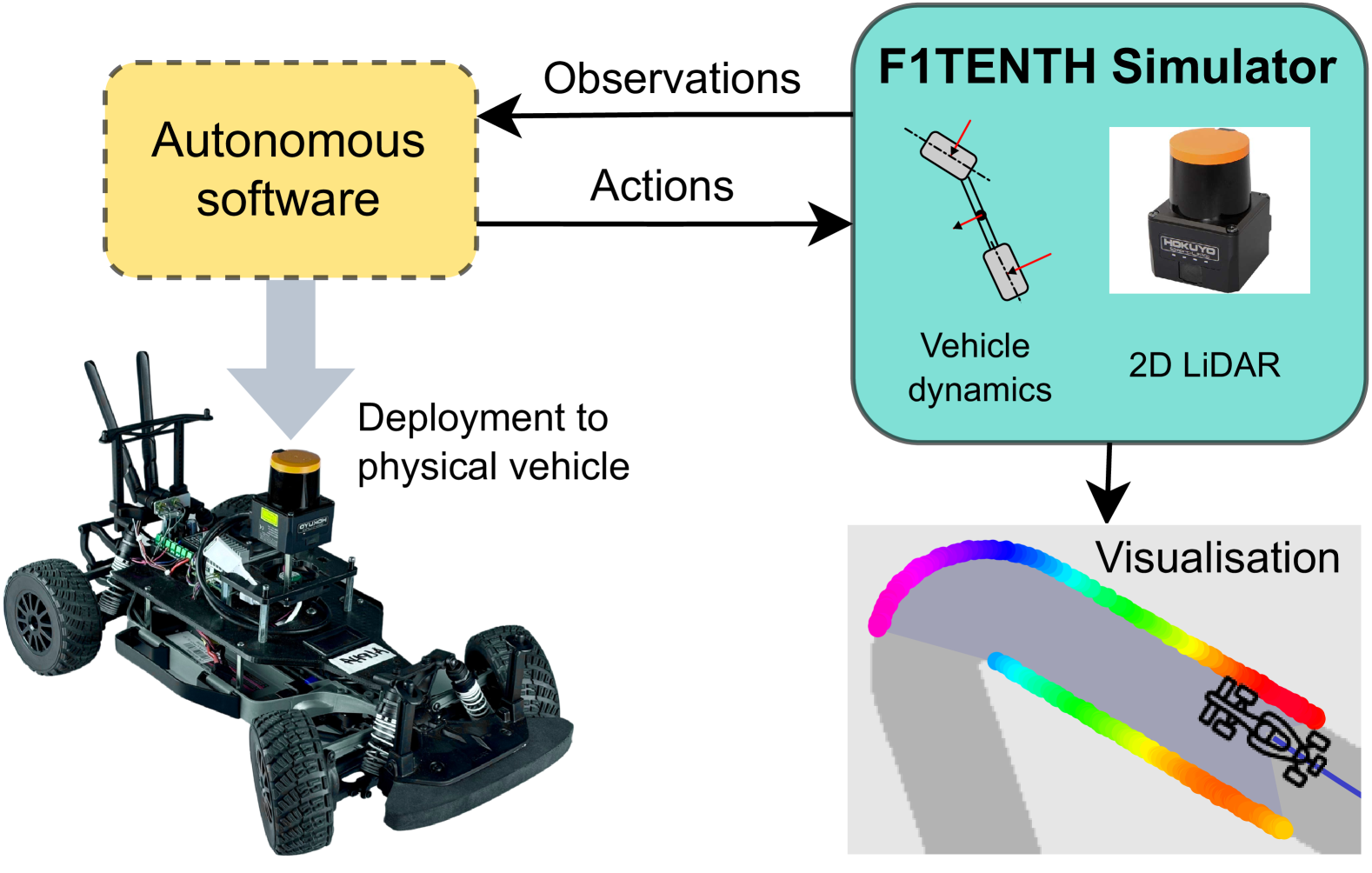
The F1TENTH autonomous driving platform, consisting of 1:10-scale remote-controlled cars, has evolved into a well-established education and research platform. The many publications and real-world competitions span many domains, from classical path planning to novel learning-based algorithms. Consequently, the field is wide and disjointed, hindering direct comparison of developed methods and making it difficult to assess the state-of-the-art. Therefore, we aim to unify the field by surveying current approaches, describing common methods, and providing benchmark results to facilitate clear comparisons and establish a baseline for future work. This research aims to survey past and current work with F1TENTH vehicles in the classical and learning categories and explain the different solution approaches. We describe particle filter localisation, trajectory optimisation and tracking, model predictive contouring control, follow-the-gap, and end-to-end reinforcement learning. We provide an open-source evaluation of benchmark methods and investigate overlooked factors of control frequency and localisation accuracy for classical methods as well as reward signal and training map for learning methods. The evaluation shows that the optimisation and tracking method achieves the fastest lap times, followed by the online planning approach. Finally, our work identifies and outlines the relevant research aspects to help motivate future work in the F1TENTH domain.
Read more4/26/2024

0
F1tenth Autonomous Racing With Offline Reinforcement Learning Methods
Prajwal Koirala, Cody Fleming
Autonomous racing serves as a critical platform for evaluating automated driving systems and enhancing vehicle mobility intelligence. This work investigates offline reinforcement learning methods to train agents within the dynamic F1tenth racing environment. The study begins by exploring the challenges of online training in the Austria race track environment, where agents consistently fail to complete the laps. Consequently, this research pivots towards an offline strategy, leveraging `expert' demonstration dataset to facilitate agent training. A waypoint-based suboptimal controller is developed to gather data with successful lap episodes. This data is then employed to train offline learning-based algorithms, with a subsequent analysis of the agents' cross-track performance, evaluating their zero-shot transferability from seen to unseen scenarios and their capacity to adapt to changes in environment dynamics. Beyond mere algorithm benchmarking in autonomous racing scenarios, this study also introduces and describes the machinery of our return-conditioned decision tree-based policy, comparing its performance with methods that employ fully connected neural networks, Transformers, and Diffusion Policies and highlighting some insights into method selection for training autonomous agents in driving interactions.
Read more8/9/2024

0
Evaluation of Local Planner-Based Stanley Control in Autonomous RC Car Racing Series
M'at'e Fazekas, Zal'an Demeter, J'anos T'oth, 'Armin Bog'ar-N'emeth, Gergely B'ari
This paper proposes a control technique for autonomous RC car racing. The presented method does not require any map-building phase beforehand since it operates only local path planning on the actual LiDAR point cloud. Racing control algorithms must have the capability to be optimized to the actual track layout for minimization of lap time. In the examined one, it is guaranteed with the improvement of the Stanley controller with additive control components to stabilize the movement in both low and high-speed ranges, and with the integration of an adaptive lookahead point to induce sharp and dynamic cornering for traveled distance reduction. The developed method is tested on a 1/10-sized RC car, and the tuning procedure from a base solution to the optimal setting in a real F1Tenth race is presented. Furthermore, the proposed method is evaluated with a comparison to a more simple reactive method, and in parallel to a more complex optimization-based technique that involves offline map building the global optimal trajectory calculation. The performance of the proposed method compared to the latter, referring to the lap time, is that the proposed one has only 8% lower average speed. This demonstrates that with appropriate tuning, a local planning-based method can be comparable with a more complex optimization-based one. Thus, the performance gap is lower than 10% from the state-of-the-art method. Moreover, the proposed technique has significantly higher similarity to real scenarios, therefore the results can be interesting in the context of automotive industry.
Read more8/28/2024

0
A Simulation Benchmark for Autonomous Racing with Large-Scale Human Data
Adrian Remonda, Nicklas Hansen, Ayoub Raji, Nicola Musiu, Marko Bertogna, Eduardo Veas, Xiaolong Wang
Despite the availability of international prize-money competitions, scaled vehicles, and simulation environments, research on autonomous racing and the control of sports cars operating close to the limit of handling has been limited by the high costs of vehicle acquisition and management, as well as the limited physics accuracy of open-source simulators. In this paper, we propose a racing simulation platform based on the simulator Assetto Corsa to test, validate, and benchmark autonomous driving algorithms, including reinforcement learning (RL) and classical Model Predictive Control (MPC), in realistic and challenging scenarios. Our contributions include the development of this simulation platform, several state-of-the-art algorithms tailored to the racing environment, and a comprehensive dataset collected from human drivers. Additionally, we evaluate algorithms in the offline RL setting. All the necessary code (including environment and benchmarks), working examples, datasets, and videos are publicly released and can be found at: https://assetto-corsa-gym.github.io
Read more7/25/2024