ViewFormer: Exploring Spatiotemporal Modeling for Multi-View 3D Occupancy Perception via View-Guided Transformers

0
Sign in to get full access
Overview
- This paper presents "ViewFormer", a novel approach to 3D occupancy perception that leverages multi-view information and spatiotemporal modeling through the use of transformers.
- The proposed method aims to overcome the limitations of existing 3D occupancy prediction techniques, which often struggle with capturing the complex dynamics and interactions present in real-world environments.
- By incorporating a view-guided transformer architecture, ViewFormer is able to effectively fuse and model the spatiotemporal relationships across multiple camera views, enabling more accurate and robust 3D occupancy prediction.
Plain English Explanation
ViewFormer: Exploring Spatiotemporal Modeling for Multi-View 3D Occupancy Perception via View-Guided Transformers is a research paper that introduces a new method for understanding the 3D layout and occupancy of an environment using information from multiple camera views. The key idea is to use a type of artificial intelligence model called a "transformer" to analyze how the occupancy and movement in the scene changes over time, across the different camera perspectives.
Existing 3D occupancy prediction techniques often struggle to capture the complex dynamics and interactions that occur in real-world environments. ViewFormer aims to address this by fusing the information from multiple camera views and using transformers to model the spatiotemporal relationships. This allows the model to better understand how objects and people are moving and interacting within the 3D space.
The view-guided transformer architecture used in ViewFormer is a key innovation. It enables the model to effectively integrate the information from the different camera views, rather than just treating them independently. This allows the model to build a more holistic understanding of the 3D scene and how it evolves over time.
Overall, ViewFormer represents an important advance in 3D occupancy prediction and could have applications in areas like autonomous driving, robotics, and smart city planning, where understanding the 3D structure and dynamics of an environment is crucial.
Technical Explanation
The core of the ViewFormer approach is the use of a transformer-based architecture to model the spatiotemporal relationships across multiple camera views for 3D occupancy prediction. Transformers are a type of deep learning model that have shown great success in a variety of tasks, particularly those involving sequence data, due to their ability to capture long-range dependencies.
In the ViewFormer model, the transformer is used to fuse the information from the different camera views and model how the 3D occupancy evolves over time. The architecture consists of several key components:
- View Encoding: Each camera view is first individually processed through a convolutional neural network to extract visual features.
- View Interaction: The view-specific features are then passed through the view-guided transformer, which learns to model the relationships between the different views.
- Spatiotemporal Modeling: The transformer output is further processed through additional convolutional and recurrent layers to capture the spatiotemporal dynamics of the 3D scene.
- 3D Occupancy Prediction: The final output of the model is a 3D occupancy grid, representing the predicted occupancy of the environment over time.
The view-guided transformer is a key innovation that enables the model to effectively integrate the information from the different camera views. It uses a attention-based mechanism to weight the importance of each view, allowing the model to focus on the most relevant information for the 3D occupancy prediction task.
The authors evaluate the ViewFormer model on several benchmark datasets for 3D occupancy prediction, demonstrating significant performance improvements over existing state-of-the-art methods. The model is shown to be particularly effective at capturing the complex spatiotemporal dynamics present in real-world environments.
Critical Analysis
The ViewFormer paper presents a compelling approach to 3D occupancy perception that leverages the power of transformers to effectively model the spatiotemporal relationships across multiple camera views. The key strengths of the method include:
- The view-guided transformer architecture, which allows the model to dynamically integrate information from the different camera views in a learnable way.
- The ability to capture the complex spatiotemporal dynamics of real-world environments, which is a significant limitation of many existing 3D occupancy prediction techniques.
- The strong empirical results, which demonstrate the effectiveness of the ViewFormer approach on several benchmark datasets.
However, the paper also acknowledges several limitations and areas for future research:
- The model's performance may be sensitive to the quality and number of camera views available, which could limit its applicability in scenarios with limited sensing capabilities.
- The computational complexity of the transformer-based architecture may make it challenging to deploy in real-time applications, particularly on resource-constrained devices.
- The paper focuses on 3D occupancy prediction, but the potential applications of the ViewFormer approach could extend to other 3D scene understanding tasks, such as 3D semantic segmentation or object detection, which could be an interesting area for future research.
Overall, the ViewFormer paper represents an important step forward in the field of 3D occupancy perception, demonstrating the potential of transformer-based architectures to unlock new capabilities in this domain. As with any research, there are always opportunities for further refinement and exploration, but the core ideas presented in this work are compelling and could have a significant impact on a variety of real-world applications.
Conclusion
The ViewFormer paper introduces a novel approach to 3D occupancy perception that leverages multi-view information and spatiotemporal modeling through the use of transformers. By incorporating a view-guided transformer architecture, the proposed method is able to effectively fuse and model the complex relationships across multiple camera views, enabling more accurate and robust 3D occupancy prediction.
The key innovations of the ViewFormer approach, including the view-guided transformer and the ability to capture spatiotemporal dynamics, represent an important advance in the field of 3D scene understanding. This work could have significant implications for a variety of applications, such as autonomous driving, robotics, and smart city planning, where understanding the 3D structure and dynamics of an environment is crucial.
While the paper acknowledges certain limitations and areas for future research, the core ideas presented in this work are compelling and demonstrate the potential of transformer-based architectures to unlock new capabilities in 3D perception. As the field of computer vision continues to evolve, the ViewFormer approach could serve as an important stepping stone towards more robust and versatile 3D scene understanding systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ViewFormer: Exploring Spatiotemporal Modeling for Multi-View 3D Occupancy Perception via View-Guided Transformers
Jinke Li, Xiao He, Chonghua Zhou, Xiaoqiang Cheng, Yang Wen, Dan Zhang
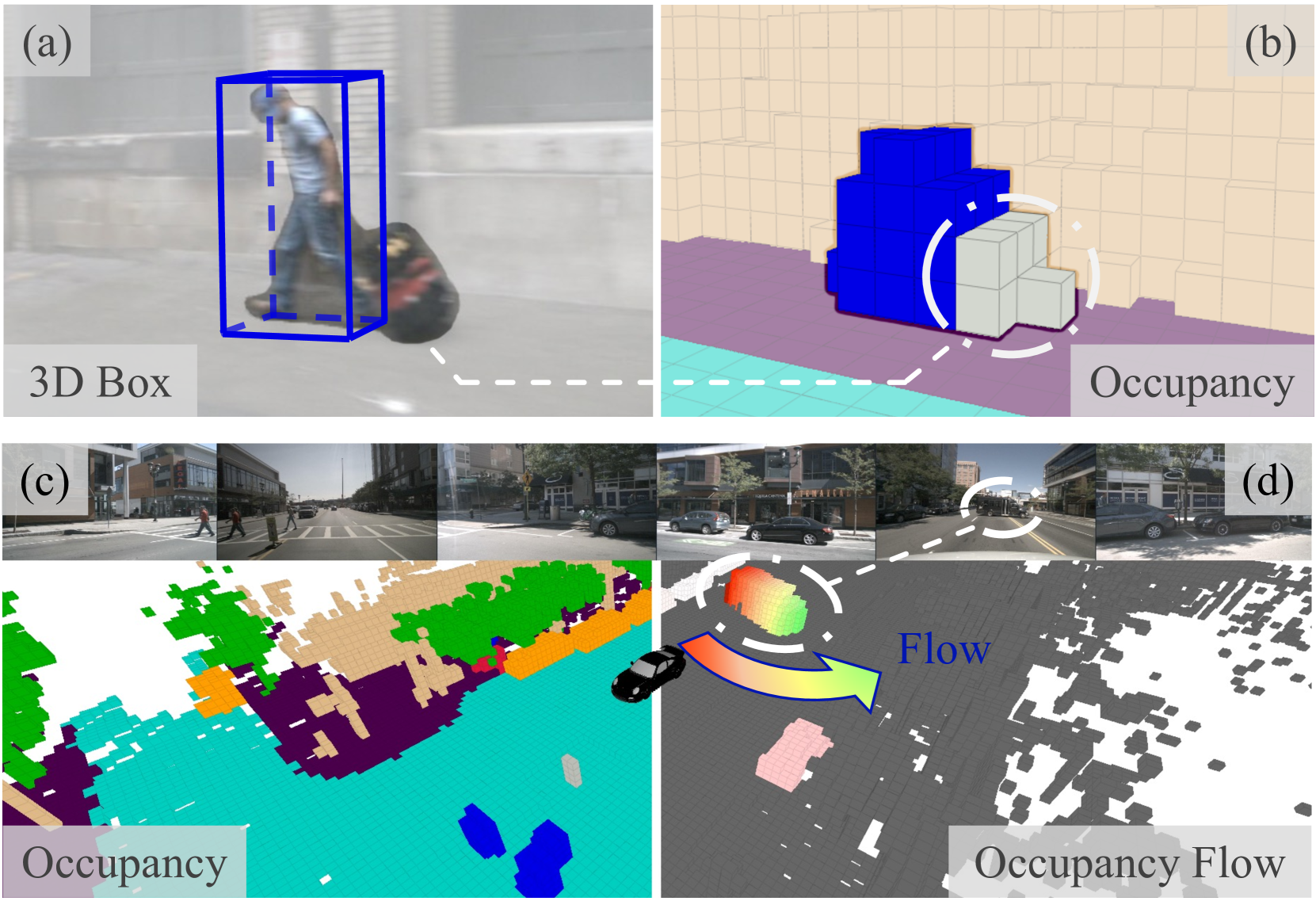
3D occupancy, an advanced perception technology for driving scenarios, represents the entire scene without distinguishing between foreground and background by quantifying the physical space into a grid map. The widely adopted projection-first deformable attention, efficient in transforming image features into 3D representations, encounters challenges in aggregating multi-view features due to sensor deployment constraints. To address this issue, we propose our learning-first view attention mechanism for effective multi-view feature aggregation. Moreover, we showcase the scalability of our view attention across diverse multi-view 3D tasks, including map construction and 3D object detection. Leveraging the proposed view attention as well as an additional multi-frame streaming temporal attention, we introduce ViewFormer, a vision-centric transformer-based framework for spatiotemporal feature aggregation. To further explore occupancy-level flow representation, we present FlowOcc3D, a benchmark built on top of existing high-quality datasets. Qualitative and quantitative analyses on this benchmark reveal the potential to represent fine-grained dynamic scenes. Extensive experiments show that our approach significantly outperforms prior state-of-the-art methods. The codes are available at url{https://github.com/ViewFormerOcc/ViewFormer-Occ}.
Read more7/15/2024
0
Unified Spatio-Temporal Tri-Perspective View Representation for 3D Semantic Occupancy Prediction
Sathira Silva, Savindu Bhashitha Wannigama, Gihan Jayatilaka, Muhammad Haris Khan, Roshan Ragel
Holistic understanding and reasoning in 3D scenes play a vital role in the success of autonomous driving systems. The evolution of 3D semantic occupancy prediction as a pretraining task for autonomous driving and robotic downstream tasks capture finer 3D details compared to methods like 3D detection. Existing approaches predominantly focus on spatial cues such as tri-perspective view embeddings (TPV), often overlooking temporal cues. This study introduces a spatiotemporal transformer architecture S2TPVFormer for temporally coherent 3D semantic occupancy prediction. We enrich the prior process by including temporal cues using a novel temporal cross-view hybrid attention mechanism (TCVHA) and generate spatiotemporal TPV embeddings (i.e. S2TPV embeddings). Experimental evaluations on the nuScenes dataset demonstrate a substantial 4.1% improvement in mean Intersection over Union (mIoU) for 3D Semantic Occupancy compared to TPVFormer, confirming the effectiveness of the proposed S2TPVFormer in enhancing 3D scene perception.
Read more4/5/2024

0
AdaOcc: Adaptive Forward View Transformation and Flow Modeling for 3D Occupancy and Flow Prediction
Dubing Chen, Wencheng Han, Jin Fang, Jianbing Shen
In this technical report, we present our solution for the Vision-Centric 3D Occupancy and Flow Prediction track in the nuScenes Open-Occ Dataset Challenge at CVPR 2024. Our innovative approach involves a dual-stage framework that enhances 3D occupancy and flow predictions by incorporating adaptive forward view transformation and flow modeling. Initially, we independently train the occupancy model, followed by flow prediction using sequential frame integration. Our method combines regression with classification to address scale variations in different scenes, and leverages predicted flow to warp current voxel features to future frames, guided by future frame ground truth. Experimental results on the nuScenes dataset demonstrate significant improvements in accuracy and robustness, showcasing the effectiveness of our approach in real-world scenarios. Our single model based on Swin-Base ranks second on the public leaderboard, validating the potential of our method in advancing autonomous car perception systems.
Read more7/2/2024

0
GaussianFormer: Scene as Gaussians for Vision-Based 3D Semantic Occupancy Prediction
Yuanhui Huang, Wenzhao Zheng, Yunpeng Zhang, Jie Zhou, Jiwen Lu
3D semantic occupancy prediction aims to obtain 3D fine-grained geometry and semantics of the surrounding scene and is an important task for the robustness of vision-centric autonomous driving. Most existing methods employ dense grids such as voxels as scene representations, which ignore the sparsity of occupancy and the diversity of object scales and thus lead to unbalanced allocation of resources. To address this, we propose an object-centric representation to describe 3D scenes with sparse 3D semantic Gaussians where each Gaussian represents a flexible region of interest and its semantic features. We aggregate information from images through the attention mechanism and iteratively refine the properties of 3D Gaussians including position, covariance, and semantics. We then propose an efficient Gaussian-to-voxel splatting method to generate 3D occupancy predictions, which only aggregates the neighboring Gaussians for a certain position. We conduct extensive experiments on the widely adopted nuScenes and KITTI-360 datasets. Experimental results demonstrate that GaussianFormer achieves comparable performance with state-of-the-art methods with only 17.8% - 24.8% of their memory consumption. Code is available at: https://github.com/huang-yh/GaussianFormer.
Read more5/28/2024