GaussianFormer: Scene as Gaussians for Vision-Based 3D Semantic Occupancy Prediction

0

Sign in to get full access
Overview
- Presents a novel 3D semantic occupancy prediction model called GaussianFormer
- Represents the 3D scene as a set of Gaussian distributions, allowing for efficient and accurate occupancy prediction
- Leverages a transformer-based architecture to capture long-range spatial and semantic dependencies
- Outperforms state-of-the-art methods on various 3D occupancy prediction benchmarks
Plain English Explanation
The paper introduces GaussianFormer, a new approach for predicting the 3D occupancy of a scene based on visual inputs. Instead of representing the scene as a grid of occupied or unoccupied voxels, GaussianFormer models the 3D environment as a collection of Gaussian distributions. This allows the model to capture the uncertainty and spatial relationships in the scene more effectively.
At the core of GaussianFormer is a transformer-based architecture, which is well-suited for understanding the long-range dependencies and contextual information in the 3D scene. By learning to represent the scene as a set of Gaussians, the model can predict the occupancy and semantic labels of the 3D environment more accurately than previous methods.
The key insight is that using Gaussian distributions to model the 3D space provides a more efficient and expressive representation compared to traditional voxel-based approaches. This allows the model to make more informed predictions about the 3D occupancy, which is crucial for applications like autonomous driving and robotics.
Technical Explanation
The GaussianFormer model takes in a set of input images and predicts a 3D scene representation in the form of Gaussian distributions. The architecture consists of a vision transformer backbone to extract visual features, followed by a Gaussian prediction head that outputs the parameters of the Gaussian distributions (mean, covariance, and semantic label) for each 3D location.
The key innovation is the use of Gaussian distributions to model the 3D scene, which allows the model to capture the uncertainty and spatial relationships more effectively compared to voxel-based approaches or sparse point cloud representations. The transformer-based architecture helps the model understand the long-range dependencies and context in the 3D scene, leading to more accurate occupancy and semantic predictions.
The authors evaluate GaussianFormer on several 3D occupancy prediction benchmarks, including the ScanNet and NYUv2 datasets. The results show that GaussianFormer outperforms state-of-the-art methods in terms of occupancy prediction accuracy, demonstrating the effectiveness of the Gaussian-based representation and the transformer-based architecture.
Critical Analysis
The paper provides a novel and well-designed approach for 3D semantic occupancy prediction, but there are a few aspects worth considering:
-
The authors mention that the Gaussian representation can be sensitive to the initialization of the mean and covariance parameters. While they propose a method to address this, further investigation into the stability and robustness of the Gaussian modeling approach could be beneficial.
-
The computational complexity of the transformer-based architecture may be a concern for real-time applications, such as autonomous driving. Exploring ways to optimize the model's efficiency would be an important direction for future research.
-
The paper focuses on static scene understanding, but extending the GaussianFormer approach to dynamic environments and incorporating temporal information could further improve its applicability in real-world scenarios.
Despite these potential limitations, the GaussianFormer model represents a significant advancement in the field of 3D semantic occupancy prediction, and the ideas presented in the paper could inspire future research in this area.
Conclusion
The GaussianFormer paper introduces a novel approach for 3D semantic occupancy prediction that represents the scene as a set of Gaussian distributions. By leveraging a transformer-based architecture, the model can effectively capture the long-range dependencies and contextual information in the 3D environment, leading to improved occupancy and semantic prediction accuracy compared to previous methods.
The use of Gaussian distributions as the underlying representation for the 3D scene is a key innovation that allows the model to efficiently and accurately model the uncertainty and spatial relationships in the data. This approach has the potential to significantly impact applications such as autonomous driving, robotics, and virtual/augmented reality, where reliable and detailed 3D scene understanding is crucial.
While the paper presents a well-designed and effective solution, there are opportunities for further research to address the potential limitations and expand the capabilities of the GaussianFormer model. Nonetheless, this work represents an important step forward in the field of 3D scene understanding and semantic occupancy prediction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GaussianFormer: Scene as Gaussians for Vision-Based 3D Semantic Occupancy Prediction
Yuanhui Huang, Wenzhao Zheng, Yunpeng Zhang, Jie Zhou, Jiwen Lu
3D semantic occupancy prediction aims to obtain 3D fine-grained geometry and semantics of the surrounding scene and is an important task for the robustness of vision-centric autonomous driving. Most existing methods employ dense grids such as voxels as scene representations, which ignore the sparsity of occupancy and the diversity of object scales and thus lead to unbalanced allocation of resources. To address this, we propose an object-centric representation to describe 3D scenes with sparse 3D semantic Gaussians where each Gaussian represents a flexible region of interest and its semantic features. We aggregate information from images through the attention mechanism and iteratively refine the properties of 3D Gaussians including position, covariance, and semantics. We then propose an efficient Gaussian-to-voxel splatting method to generate 3D occupancy predictions, which only aggregates the neighboring Gaussians for a certain position. We conduct extensive experiments on the widely adopted nuScenes and KITTI-360 datasets. Experimental results demonstrate that GaussianFormer achieves comparable performance with state-of-the-art methods with only 17.8% - 24.8% of their memory consumption. Code is available at: https://github.com/huang-yh/GaussianFormer.
Read more5/28/2024

0
Semantic Gaussians: Open-Vocabulary Scene Understanding with 3D Gaussian Splatting
Jun Guo, Xiaojian Ma, Yue Fan, Huaping Liu, Qing Li
Open-vocabulary 3D scene understanding presents a significant challenge in computer vision, with wide-ranging applications in embodied agents and augmented reality systems. Existing methods adopt neurel rendering methods as 3D representations and jointly optimize color and semantic features to achieve rendering and scene understanding simultaneously. In this paper, we introduce Semantic Gaussians, a novel open-vocabulary scene understanding approach based on 3D Gaussian Splatting. Our key idea is to distill knowledge from 2D pre-trained models to 3D Gaussians. Unlike existing methods, we design a versatile projection approach that maps various 2D semantic features from pre-trained image encoders into a novel semantic component of 3D Gaussians, which is based on spatial relationship and need no additional training. We further build a 3D semantic network that directly predicts the semantic component from raw 3D Gaussians for fast inference. The quantitative results on ScanNet segmentation and LERF object localization demonstates the superior performance of our method. Additionally, we explore several applications of Semantic Gaussians including object part segmentation, instance segmentation, scene editing, and spatiotemporal segmentation with better qualitative results over 2D and 3D baselines, highlighting its versatility and effectiveness on supporting diverse downstream tasks.
Read more8/26/2024
0
ViewFormer: Exploring Spatiotemporal Modeling for Multi-View 3D Occupancy Perception via View-Guided Transformers
Jinke Li, Xiao He, Chonghua Zhou, Xiaoqiang Cheng, Yang Wen, Dan Zhang
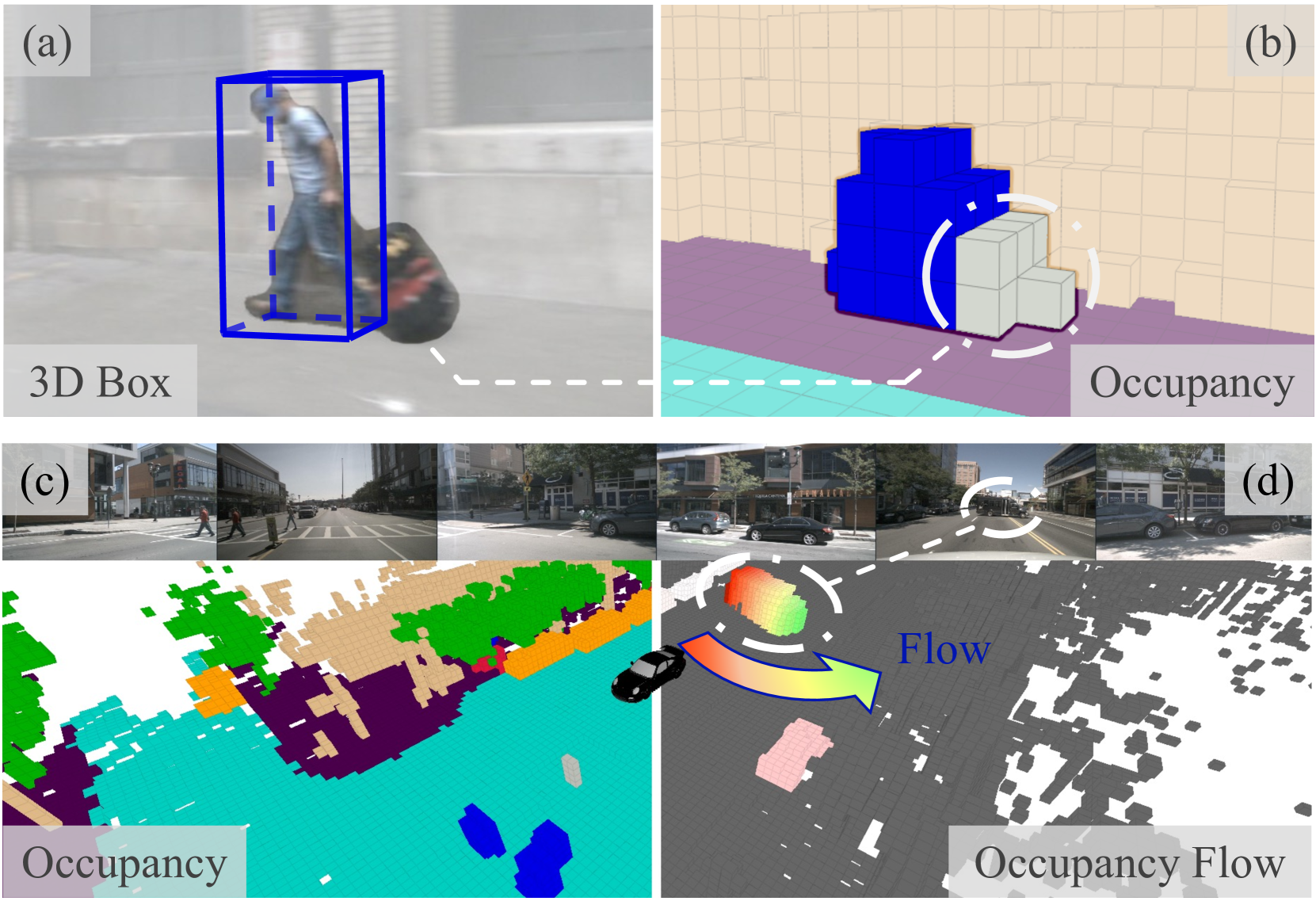
3D occupancy, an advanced perception technology for driving scenarios, represents the entire scene without distinguishing between foreground and background by quantifying the physical space into a grid map. The widely adopted projection-first deformable attention, efficient in transforming image features into 3D representations, encounters challenges in aggregating multi-view features due to sensor deployment constraints. To address this issue, we propose our learning-first view attention mechanism for effective multi-view feature aggregation. Moreover, we showcase the scalability of our view attention across diverse multi-view 3D tasks, including map construction and 3D object detection. Leveraging the proposed view attention as well as an additional multi-frame streaming temporal attention, we introduce ViewFormer, a vision-centric transformer-based framework for spatiotemporal feature aggregation. To further explore occupancy-level flow representation, we present FlowOcc3D, a benchmark built on top of existing high-quality datasets. Qualitative and quantitative analyses on this benchmark reveal the potential to represent fine-grained dynamic scenes. Extensive experiments show that our approach significantly outperforms prior state-of-the-art methods. The codes are available at url{https://github.com/ViewFormerOcc/ViewFormer-Occ}.
Read more7/15/2024

0
Fully Sparse 3D Occupancy Prediction
Haisong Liu, Yang Chen, Haiguang Wang, Zetong Yang, Tianyu Li, Jia Zeng, Li Chen, Hongyang Li, Limin Wang
Occupancy prediction plays a pivotal role in autonomous driving. Previous methods typically construct dense 3D volumes, neglecting the inherent sparsity of the scene and suffering from high computational costs. To bridge the gap, we introduce a novel fully sparse occupancy network, termed SparseOcc. SparseOcc initially reconstructs a sparse 3D representation from camera-only inputs and subsequently predicts semantic/instance occupancy from the 3D sparse representation by sparse queries. A mask-guided sparse sampling is designed to enable sparse queries to interact with 2D features in a fully sparse manner, thereby circumventing costly dense features or global attention. Additionally, we design a thoughtful ray-based evaluation metric, namely RayIoU, to solve the inconsistency penalty along the depth axis raised in traditional voxel-level mIoU criteria. SparseOcc demonstrates its effectiveness by achieving a RayIoU of 34.0, while maintaining a real-time inference speed of 17.3 FPS, with 7 history frames inputs. By incorporating more preceding frames to 15, SparseOcc continuously improves its performance to 35.1 RayIoU without bells and whistles.
Read more7/22/2024