Vision-and-Language Navigation Today and Tomorrow: A Survey in the Era of Foundation Models

0
Sign in to get full access
Overview
- This paper provides a comprehensive survey of the current state and future directions of Vision-and-Language Navigation (VLN), a field that combines computer vision, natural language processing, and autonomous navigation.
- The authors examine the evolution of VLN research, including the emergence of foundation models that leverage large-scale, pre-trained models to tackle complex, multimodal tasks.
- The paper also explores new frontiers in VLN, such as video-based VLN and the use of affordances-oriented planning based on foundation models.
- Finally, the authors discuss the potential for a vision-language geo-foundation model that could integrate spatial and geographic information into VLN systems.
Plain English Explanation
This paper looks at the current state and future of a field called Vision-and-Language Navigation (VLN). VLN combines computer vision, which is about understanding images, with natural language processing, which is about understanding language, to help robots and other systems navigate the world.
The paper explains how VLN research has evolved, including the rise of "foundation models" - powerful AI models that can be trained on large amounts of data to tackle all sorts of tasks. These foundation models are starting to be used in VLN to help systems understand both visual information and language instructions.
The paper also explores some new and exciting directions in VLN, like using video instead of just static images, and planning navigation based on understanding the "affordances" of the environment - what actions are possible in a given space. The authors also discuss the potential for a "vision-language geo-foundation model" that could integrate spatial and geographic information into VLN systems.
Overall, the paper provides a comprehensive overview of the current state of VLN and where the field might be headed in the future, with a focus on how emerging AI technologies are shaping this important area of research.
Technical Explanation
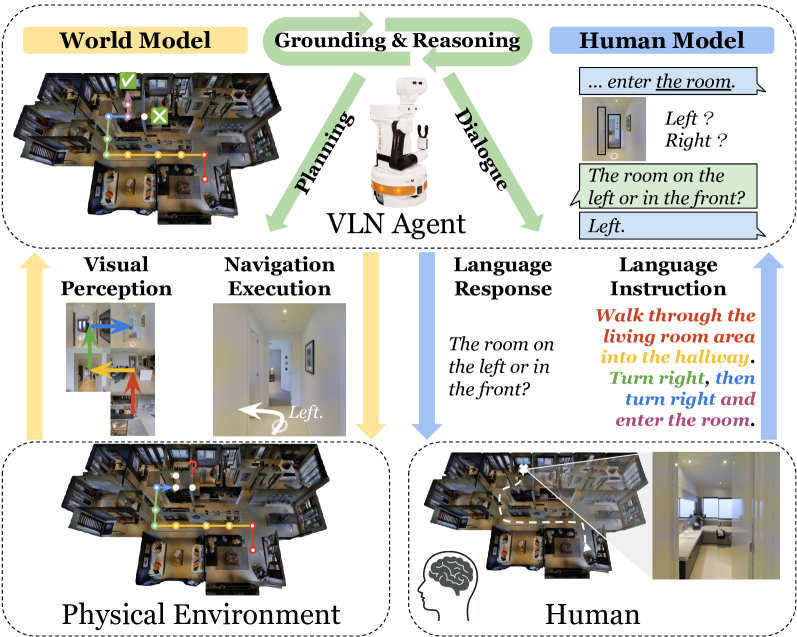
The paper begins by providing background on the Vision-and-Language Navigation (VLN) task, which involves navigating through an environment based on natural language instructions and visual cues. The authors discuss the evolution of VLN, from early works that relied on predefined environments and hand-crafted components to more recent approaches that leverage foundation models and end-to-end learning.
The paper then delves into the key task formulations and technical approaches in VLN, including instruction-following, environment-agnostic navigation, and multi-modal grounding. It highlights how the introduction of MC-GPT, a memory-augmented version of GPT, has enabled more robust and flexible VLN systems.
The authors also explore emerging directions in VLN, such as video-based VLN, which leverages temporal information to improve navigation, and affordances-oriented planning, which uses foundation models to reason about the possible actions in a given environment.
Finally, the paper discusses the potential for a vision-language geo-foundation model that could integrate spatial and geographic information into VLN systems, enabling more robust and versatile navigation capabilities.
Critical Analysis
The paper provides a thorough and insightful overview of the current state of Vision-and-Language Navigation (VLN) research, highlighting the significant progress made in the field as well as the exciting new directions being explored.
One potential limitation mentioned in the paper is the need for more diverse and realistic datasets to train and evaluate VLN systems. The authors note that many existing datasets are constrained to limited environments or lack the richness and complexity of real-world scenarios. Expanding the scope and realism of VLN datasets could be an important area for future research.
Additionally, the paper does not delve deeply into the potential ethical and societal implications of VLN technology. As these systems become more advanced and widely deployed, it will be crucial to consider issues such as bias, privacy, and the impact on human labor and employment. Addressing these concerns proactively could help ensure that VLN developments are aligned with societal values and interests.
Overall, the paper presents a comprehensive and forward-looking analysis of the VLN field, providing a solid foundation for researchers and practitioners to build upon as they explore new frontiers in this rapidly evolving domain.
Conclusion
This paper provides a comprehensive survey of the current state and future directions of Vision-and-Language Navigation (VLN) research. The authors trace the evolution of VLN, highlighting the emergence of foundation models and the new frontiers being explored, such as video-based VLN, affordances-oriented planning, and the potential for a vision-language geo-foundation model.
The paper offers a detailed technical explanation of the key task formulations and approaches in VLN, while also providing a plain-English summary that makes the concepts accessible to a general audience. The critical analysis section raises important considerations around dataset limitations and the need to address ethical and societal implications as VLN systems become more advanced.
Overall, this paper serves as a valuable resource for researchers, engineers, and anyone interested in the rapidly evolving field of Vision-and-Language Navigation and its potential to transform the way robots and intelligent systems navigate and interact with the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Vision-and-Language Navigation Today and Tomorrow: A Survey in the Era of Foundation Models
Yue Zhang, Ziqiao Ma, Jialu Li, Yanyuan Qiao, Zun Wang, Joyce Chai, Qi Wu, Mohit Bansal, Parisa Kordjamshidi
Vision-and-Language Navigation (VLN) has gained increasing attention over recent years and many approaches have emerged to advance their development. The remarkable achievements of foundation models have shaped the challenges and proposed methods for VLN research. In this survey, we provide a top-down review that adopts a principled framework for embodied planning and reasoning, and emphasizes the current methods and future opportunities leveraging foundation models to address VLN challenges. We hope our in-depth discussions could provide valuable resources and insights: on one hand, to milestone the progress and explore opportunities and potential roles for foundation models in this field, and on the other, to organize different challenges and solutions in VLN to foundation model researchers.
Read more7/10/2024

0
NavGPT-2: Unleashing Navigational Reasoning Capability for Large Vision-Language Models
Gengze Zhou, Yicong Hong, Zun Wang, Xin Eric Wang, Qi Wu
Capitalizing on the remarkable advancements in Large Language Models (LLMs), there is a burgeoning initiative to harness LLMs for instruction following robotic navigation. Such a trend underscores the potential of LLMs to generalize navigational reasoning and diverse language understanding. However, a significant discrepancy in agent performance is observed when integrating LLMs in the Vision-and-Language navigation (VLN) tasks compared to previous downstream specialist models. Furthermore, the inherent capacity of language to interpret and facilitate communication in agent interactions is often underutilized in these integrations. In this work, we strive to bridge the divide between VLN-specialized models and LLM-based navigation paradigms, while maintaining the interpretative prowess of LLMs in generating linguistic navigational reasoning. By aligning visual content in a frozen LLM, we encompass visual observation comprehension for LLMs and exploit a way to incorporate LLMs and navigation policy networks for effective action predictions and navigational reasoning. We demonstrate the data efficiency of the proposed methods and eliminate the gap between LM-based agents and state-of-the-art VLN specialists.
Read more7/18/2024

0
MC-GPT: Empowering Vision-and-Language Navigation with Memory Map and Reasoning Chains
Zhaohuan Zhan, Lisha Yu, Sijie Yu, Guang Tan
In the Vision-and-Language Navigation (VLN) task, the agent is required to navigate to a destination following a natural language instruction. While learning-based approaches have been a major solution to the task, they suffer from high training costs and lack of interpretability. Recently, Large Language Models (LLMs) have emerged as a promising tool for VLN due to their strong generalization capabilities. However, existing LLM-based methods face limitations in memory construction and diversity of navigation strategies. To address these challenges, we propose a suite of techniques. Firstly, we introduce a method to maintain a topological map that stores navigation history, retaining information about viewpoints, objects, and their spatial relationships. This map also serves as a global action space. Additionally, we present a Navigation Chain of Thoughts module, leveraging human navigation examples to enrich navigation strategy diversity. Finally, we establish a pipeline that integrates navigational memory and strategies with perception and action prediction modules. Experimental results on the REVERIE and R2R datasets show that our method effectively enhances the navigation ability of the LLM and improves the interpretability of navigation reasoning.
Read more8/13/2024

0
Vision-Language Navigation with Continual Learning
Zhiyuan Li, Yanfeng Lv, Ziqin Tu, Di Shang, Hong Qiao
Vision-language navigation (VLN) is a critical domain within embedded intelligence, requiring agents to navigate 3D environments based on natural language instructions. Traditional VLN research has focused on improving environmental understanding and decision accuracy. However, these approaches often exhibit a significant performance gap when agents are deployed in novel environments, mainly due to the limited diversity of training data. Expanding datasets to cover a broader range of environments is impractical and costly. We propose the Vision-Language Navigation with Continual Learning (VLNCL) paradigm to address this challenge. In this paradigm, agents incrementally learn new environments while retaining previously acquired knowledge. VLNCL enables agents to maintain an environmental memory and extract relevant knowledge, allowing rapid adaptation to new environments while preserving existing information. We introduce a novel dual-loop scenario replay method (Dual-SR) inspired by brain memory replay mechanisms integrated with VLN agents. This method facilitates consolidating past experiences and enhances generalization across new tasks. By utilizing a multi-scenario memory buffer, the agent efficiently organizes and replays task memories, thereby bolstering its ability to adapt quickly to new environments and mitigating catastrophic forgetting. Our work pioneers continual learning in VLN agents, introducing a novel experimental setup and evaluation metrics. We demonstrate the effectiveness of our approach through extensive evaluations and establish a benchmark for the VLNCL paradigm. Comparative experiments with existing continual learning and VLN methods show significant improvements, achieving state-of-the-art performance in continual learning ability and highlighting the potential of our approach in enabling rapid adaptation while preserving prior knowledge.
Read more9/5/2024