What metrics of participation balance predict outcomes of collaborative learning with a robot?

0
🤷
Sign in to get full access
Overview
- This paper examines how different metrics of participation balance, such as turn-taking and information sharing, predict the outcomes of collaborative learning between humans and robots.
- The researchers conducted experiments where pairs of participants worked together with a robot on a learning task, and they analyzed the relationship between participation metrics and learning outcomes.
- The findings provide insights into the factors that contribute to effective human-robot collaboration in educational and training settings.
Plain English Explanation
The paper looks at how the way people participate and interact with a robot during a learning activity can affect how much they learn. The researchers had pairs of people work together with a robot on a learning task, and they measured things like how much each person talked, how much information they shared, and how evenly the participation was balanced between them. They then looked at how these participation patterns related to how much the people learned from the activity.
The key idea is that the way people interact and contribute during collaborative learning with a robot is important for achieving good learning outcomes. By understanding what participation metrics, like building better human-agent teams through balancing human and agent contributions or the power of combined modalities in interactive robot learning, predict better learning, the researchers can help design robots and collaboration processes that support more effective human-robot learning partnerships.
Technical Explanation
The paper reports on an experiment where pairs of participants worked together with a robot on a collaborative learning task. The researchers measured various metrics of participation balance, such as:
- Turn-taking: how evenly the participants took turns contributing to the conversation
- Information sharing: how equally the participants shared information and insights
- Rapport: how positively the participants engaged with each other and the robot
They then analyzed how these participation metrics related to the learning outcomes, such as test scores and subjective assessments of the learning experience.
The results showed that more balanced participation, in terms of turn-taking and information sharing, was associated with better learning outcomes. Measures of rapport and social engagement were also predictive of positive learning experiences. These findings suggest that designing robots and collaboration processes to promote balanced and engaged participation can support more effective human-robot collaborative learning.
Critical Analysis
The paper provides valuable insights into the factors that contribute to successful collaborative learning with robots. By focusing on participation metrics, the researchers offer a nuanced understanding of the interpersonal dynamics at play, going beyond just measuring individual performance.
However, the study has some limitations. It was conducted in a controlled laboratory setting, which may not fully capture the complexities of real-world educational or training environments. Additionally, the sample size was relatively small, and the learning task was relatively simple, so further research is needed to validate the findings in more diverse and challenging contexts.
Another potential issue is the reliance on self-reported measures of rapport and learning experience. These subjective assessments could be influenced by factors beyond the actual learning outcomes, such as participants' preconceptions or biases. Incorporating more objective measures of learning, such as knowledge retention over time, could strengthen the analysis.
Despite these limitations, the paper makes an important contribution to the growing body of research on human-robot interaction in educational and training settings. The findings highlight the importance of considering social and interpersonal factors, not just individual performance, when designing collaborative learning systems involving robots. This research can inform the development of more empowering and effective collaborative online learning experiences that leverage the unique capabilities of both humans and robots.
Conclusion
This paper explores how metrics of participation balance, such as turn-taking and information sharing, can predict the outcomes of collaborative learning between humans and robots. The findings suggest that promoting more balanced and engaged participation in human-robot interactions can support more effective learning experiences.
By understanding the social and interpersonal dynamics at play in these collaborative settings, the researchers offer insights that can inform the design of robots and collaboration processes that better support human learning and development. While further research is needed to validate the findings in more diverse contexts, this work represents an important step in understanding how people respond to and interact with robots in learning and training scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
0
What metrics of participation balance predict outcomes of collaborative learning with a robot?
Yuya Asano, Diane Litman, Quentin King-Shepard, Tristan Maidment, Tyree Langley, Teresa Davison, Timothy Nokes-Malach, Adriana Kovashka, Erin Walker
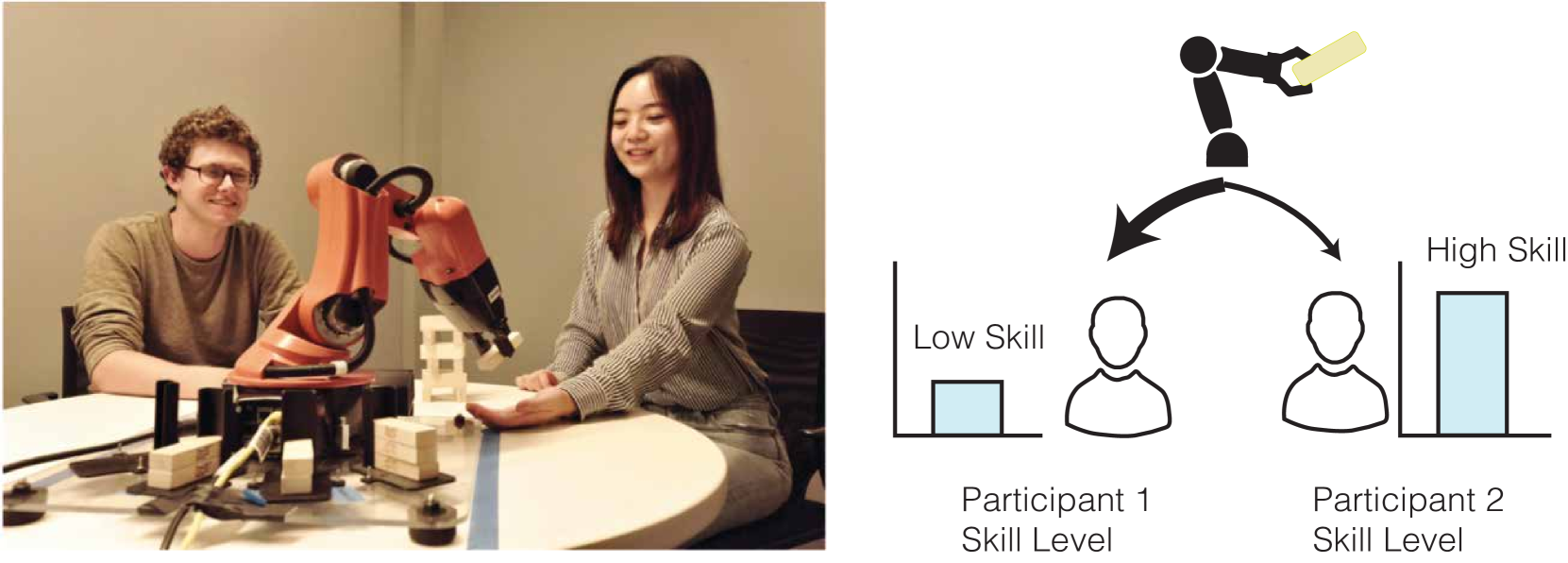
One of the keys to the success of collaborative learning is balanced participation by all learners, but this does not always happen naturally. Pedagogical robots have the potential to facilitate balance. However, it remains unclear what participation balance robots should aim at; various metrics have been proposed, but it is still an open question whether we should balance human participation in human-human interactions (HHI) or human-robot interactions (HRI) and whether we should consider robots' participation in collaborative learning involving multiple humans and a robot. This paper examines collaborative learning between a pair of students and a teachable robot that acts as a peer tutee to answer the aforementioned question. Through an exploratory study, we hypothesize which balance metrics in the literature and which portions of dialogues (including vs. excluding robots' participation and human participation in HHI vs. HRI) will better predict learning as a group. We test the hypotheses with another study and replicate them with automatically obtained units of participation to simulate the information available to robots when they adaptively fix imbalances in real-time. Finally, we discuss recommendations on which metrics learning science researchers should choose when trying to understand how to facilitate collaboration.
Read more5/21/2024

0
Designs for Enabling Collaboration in Human-Machine Teaming via Interactive and Explainable Systems
Rohan Paleja, Michael Munje, Kimberlee Chang, Reed Jensen, Matthew Gombolay
Collaborative robots and machine learning-based virtual agents are increasingly entering the human workspace with the aim of increasing productivity and enhancing safety. Despite this, we show in a ubiquitous experimental domain, Overcooked-AI, that state-of-the-art techniques for human-machine teaming (HMT), which rely on imitation or reinforcement learning, are brittle and result in a machine agent that aims to decouple the machine and human's actions to act independently rather than in a synergistic fashion. To remedy this deficiency, we develop HMT approaches that enable iterative, mixed-initiative team development allowing end-users to interactively reprogram interpretable AI teammates. Our 50-subject study provides several findings that we summarize into guidelines. While all approaches underperform a simple collaborative heuristic (a critical, negative result for learning-based methods), we find that white-box approaches supported by interactive modification can lead to significant team development, outperforming white-box approaches alone, and black-box approaches are easier to train and result in better HMT performance highlighting a tradeoff between explainability and interactivity versus ease-of-training. Together, these findings present three important directions: 1) Improving the ability to generate collaborative agents with white-box models, 2) Better learning methods to facilitate collaboration rather than individualized coordination, and 3) Mixed-initiative interfaces that enable users, who may vary in ability, to improve collaboration.
Read more6/10/2024
0
Designing for Fairness in Human-Robot Interactions
Houston Claure
The foundation of successful human collaboration is deeply rooted in the principles of fairness. As robots are increasingly prevalent in various parts of society where they are working alongside groups and teams of humans, their ability to understand and act according to principles of fairness becomes crucial for their effective integration. This is especially critical when robots are part of multi-human teams, where they must make continuous decisions regarding the allocation of resources. These resources can be material, such as tools, or communicative, such as gaze direction, and must be distributed fairly among team members to ensure optimal team performance and healthy group dynamics. Therefore, our research focuses on understanding how robots can effectively participate within human groups by making fair decisions while contributing positively to group dynamics and outcomes. In this paper, I discuss advances toward ensuring that robots are capable of considering human notions of fairness in their decision-making.
Read more6/3/2024

0
Human-Cobot collaboration's impact on success, time completion, errors, workload, gestures and acceptability during an assembly task
'Etienne Fournier, Christine Jeoffrion, Belal Hmedan, Damien Pellier, Humbert Fiorino, Aur'elie Landry
The 5.0 industry promotes collaborative robots (cobots). This research studies the impacts of cobot collaboration using an experimental setup. 120 participants realized a simple and a complex assembly task. 50% collaborated with another human (H/H) and 50% with a cobot (H/C). The workload and the acceptability of the cobotic collaboration were measured. Working with a cobot decreases the effect of the task complexity on the human workload and on the output quality. However, it increases the time completion and the number of gestures (while decreasing their frequency). The H/C couples have a higher chance of success but they take more time and more gestures to realize the task. The results of this research could help developers and stakeholders to understand the impacts of implementing a cobot in production chains.
Read more5/29/2024