Wheel Odometry-Based Localization for Autonomous Wheelchair

0
🗣️
Sign in to get full access
Overview
- Localization is crucial for autonomous vehicles
- GPS is commonly used, but can be unreliable in certain situations
- Autonomous vehicles need self-localization capabilities to operate independently
- This study evaluates the performance of wheel odometry for autonomous wheelchair localization
Plain English Explanation
Autonomous vehicles, like self-driving cars or robotic wheelchairs, need to know where they are at all times to navigate safely and effectively. One of the most common ways to do this is by using the global positioning system (GPS). GPS uses satellites in space to pinpoint a vehicle's location on the ground. However, GPS doesn't always work well, especially in areas with a lot of buildings or trees that can block the satellite signals.
To make sure autonomous vehicles can still figure out where they are, even when GPS is unreliable, researchers are exploring other localization techniques. One approach is called odometry, which uses sensors on the vehicle to estimate its position and orientation based on its movements. Wheel odometry, in particular, relies on measuring the speed and rotation of the vehicle's wheels to calculate its location.
This study looked at how well wheel odometry works for localizing an autonomous wheelchair. The researchers used a mathematical model to predict the wheelchair's position and orientation based on the speed and turning of its wheels. They then tested this wheel odometry system to see how accurately it could track the wheelchair's movements.
Technical Explanation
The researchers employed the differential drive kinematic model to determine the predicted pose (position and orientation) of the autonomous wheelchair based on measurements of its linear and angular velocity. This wheel odometry approach has the advantage of being less reliant on the surrounding environment compared to other localization methods like visual odometry or laser odometry.
To evaluate the performance of the wheel odometry-based localization, the researchers conducted several experiments. Before running the experiments, they also performed calibration procedures to ensure accurate measurements from the sensors. The results of these experiments provide insights into the effectiveness of using wheel odometry for autonomous wheelchair localization.
Compared to other odometry approaches, such as those using radar or combining lidar, IMU, and wheel sensors, the wheel odometry system evaluated in this study offers a simpler and more cost-effective way to achieve localization for autonomous wheelchairs. However, the reliability and accuracy of the technique may be influenced by factors like wheel slippage or uneven terrain, which could introduce errors in the position and orientation estimates.
Critical Analysis
The paper provides a thorough evaluation of the wheel odometry approach for autonomous wheelchair localization, but it does not address certain limitations or potential issues that could arise in real-world scenarios. For example, the experiments were likely conducted in a controlled environment, and the performance of the wheel odometry system may degrade in more complex, unstructured environments with obstacles, slopes, or other factors that could affect wheel traction and sensor measurements.
Additionally, the paper does not discuss how the wheel odometry system would perform in the long term or how it could be integrated with other localization techniques, such as SLAM (Simultaneous Localization and Mapping), to improve overall localization accuracy and robustness. Further research and testing in more diverse environments would help provide a more comprehensive understanding of the strengths and weaknesses of this wheel odometry approach.
Conclusion
This study demonstrates the potential of using wheel odometry for autonomous wheelchair localization, providing a cost-effective and relatively simple solution compared to more complex sensor fusion techniques. The results indicate that the wheel odometry system can reasonably estimate the position and orientation of the wheelchair, which could be useful for applications where GPS is unreliable or unavailable.
However, the study also highlights the need for further research to address the limitations of the wheel odometry approach, such as its sensitivity to environmental factors and the potential for cumulative errors over time. Integrating wheel odometry with other localization methods, such as SLAM or radar-based localization, could help create a more robust and reliable localization system for autonomous vehicles operating in diverse environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🗣️
0
Wheel Odometry-Based Localization for Autonomous Wheelchair
P Paryanto, Rakha Rahmadani Pratama, Roni Permana Saputra
Localization is a fundamental requirement for an autonomous vehicle system. One of the most often used systems for autonomous vehicle localization is the global positioning system (GPS). Nevertheless, the functionality of GPS is strongly dependent on the availability of satellites, making it unreliable in some situations. As a result, autonomous vehicles must possess autonomous self-localization capabilities to ensure their independent operation. Odometry techniques are employed to achieve vehicle localization by predicting the vehicle position and orientation based on sensor measurements of the vehicle motion. One of the approaches employed in odometry is known as wheel odometry. Wheel odometry has a lower degree of reliance on the surrounding environment than visual odometry and laser odometry. This study aims to evaluate the performance of wheel odometry implementation for an autonomous wheelchair in the context of the localization process. The differential drive kinematic model is employed to determine the predicted pose of a wheelchair. This prediction is derived from the measurement of the linear and angular velocity of the wheelchair. Several experiments have been conducted to evaluate the performance of wheel odometry-based localization. Prior to experimenting, calibration procedures have also been performed to ensure accurate measurements of the sensor.
Read more5/7/2024
📶
0
Advancements in Radar Odometry
Matteo Frosi, Mirko Usuelli, Matteo Matteucci
Radar odometry estimation has emerged as a critical technique in the field of autonomous navigation, providing robust and reliable motion estimation under various environmental conditions. Despite its potential, the complex nature of radar signals and the inherent challenges associated with processing these signals have limited the widespread adoption of this technology. This paper aims to address these challenges by proposing novel improvements to an existing method for radar odometry estimation, designed to enhance accuracy and reliability in diverse scenarios. Our pipeline consists of filtering, motion compensation, oriented surface points computation, smoothing, one-to-many radar scan registration, and pose refinement. The developed method enforces local understanding of the scene, by adding additional information through smoothing techniques, and alignment of consecutive scans, as a refinement posterior to the one-to-many registration. We present an in-depth investigation of the contribution of each improvement to the localization accuracy, and we benchmark our system on the sequences of the main datasets for radar understanding, i.e., the Oxford Radar RobotCar, MulRan, and Boreas datasets. The proposed pipeline is able to achieve superior results, on all scenarios considered and under harsh environmental constraints.
Read more4/8/2024
0
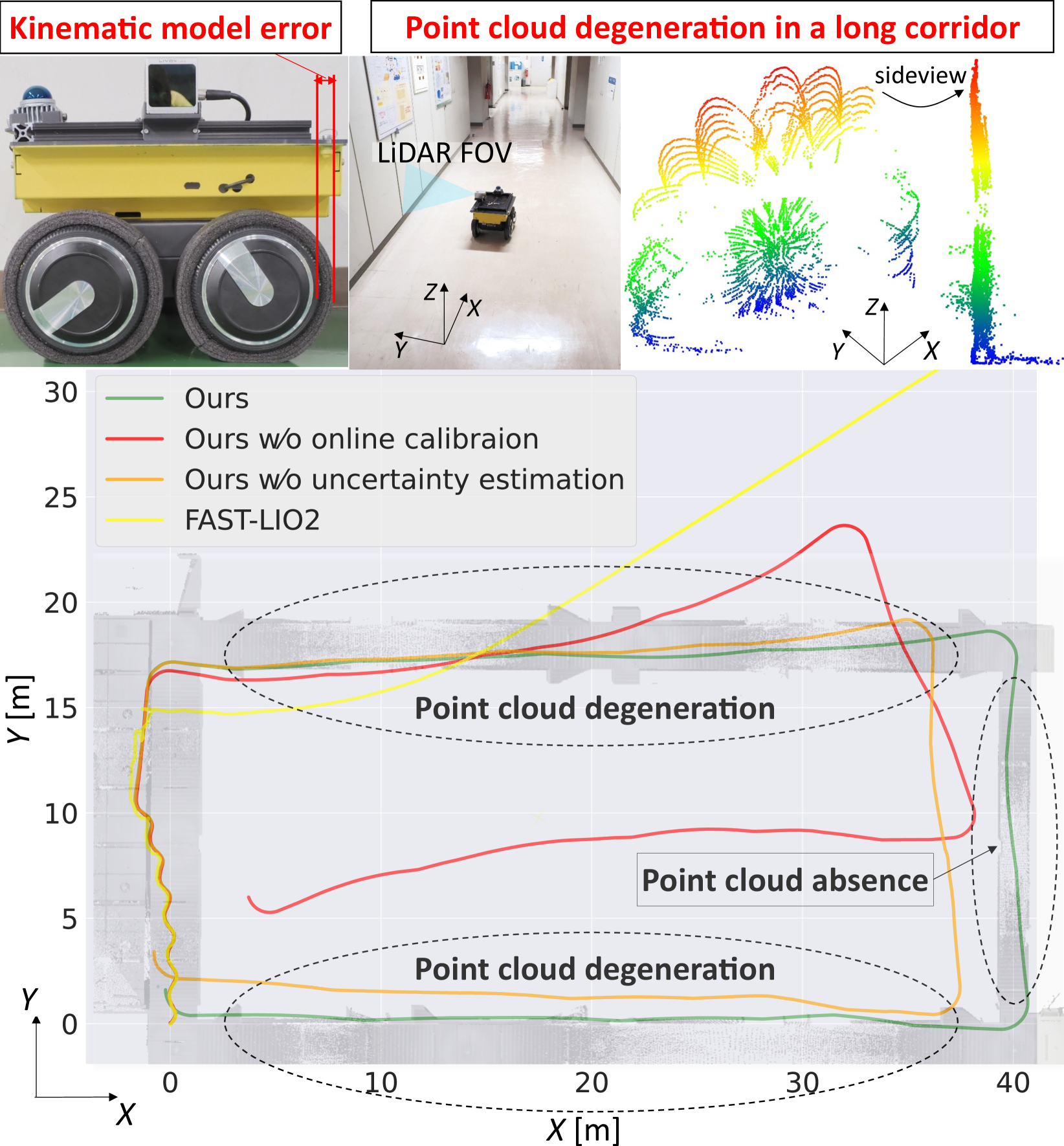
Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
Taku Okawara, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Kentaro Uno, Kazuya Yoshida
Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
Read more9/14/2024
👁️
0
Autonomous Mobile Robot Navigation: Tracking problem
Salem Ameen, Husan F. Vokhidov
This paper presents a study on autonomous robot navigation, focusing on three key behaviors: Odometry, Target Tracking, and Obstacle Avoidance. Each behavior is described in detail, along with experimental setups for simulated and real-world environments. Odometry utilizes wheel encoder data for precise navigation along predefined paths, validated through experiments with a Pioneer robot. Target Tracking employs vision-based techniques for pursuing designated targets while avoiding obstacles, demonstrated on the same platform. Obstacle Avoidance utilizes ultrasonic sensors to navigate cluttered environments safely, validated in both simulated and real-world scenarios. Additionally, the paper extends the project to include an Elegoo robot car, leveraging its features for enhanced experimentation. Through advanced algorithms and experimental validations, this study provides insights into developing robust navigation systems for autonomous robots.
Read more7/9/2024