WildGraph: Realistic Graph-based Trajectory Generation for Wildlife

0
Sign in to get full access
Overview
- This paper presents WildGraph, a novel system for generating realistic trajectories of wildlife movement based on graph-based modeling.
- The system aims to capture the complex and stochastic nature of animal behavior to produce synthetic data that can be used for tasks like habitat monitoring and conservation planning.
- The key contributions include a graph-based representation of the environment, a Bayesian network model for trajectory generation, and a method for incorporating real-world data into the synthetic trajectories.
Plain English Explanation
Wildlife tracking and monitoring is an important task for understanding animal behavior and informing conservation efforts. However, collecting real-world wildlife data can be challenging and time-consuming. To address this, the researchers developed WildGraph, a system that can generate realistic synthetic trajectories of animal movement.
At the core of WildGraph is a graph-based representation of the environment, where nodes represent locations and edges represent potential paths between them. The researchers then use a Bayesian network model to simulate how an animal might move through this graph, taking into account factors like the animal's current location, the terrain, and its past movement patterns.
By incorporating real-world data, such as GPS tracking of animals or habitat information, WildGraph can produce synthetic trajectories that closely mimic the behavior of actual wildlife. This synthetic data can then be used for a variety of applications, such as testing habitat monitoring algorithms or generating training data for trajectory prediction models.
The key advantage of WildGraph is its ability to generate large amounts of realistic synthetic data, which can be particularly useful when real-world data is scarce or difficult to collect. This can help researchers and conservationists better understand and predict animal behavior, ultimately leading to more effective wildlife management and conservation strategies.
Technical Explanation
The WildGraph system represents the environment as a graph, where nodes correspond to locations and edges represent potential paths between them. This graph-based representation allows the researchers to capture the complex and stochastic nature of animal movement, which is often influenced by factors like terrain, resources, and past behavior.
To generate realistic trajectories, the researchers employ a Bayesian network model. This model takes into account various factors, such as the animal's current location, the terrain, and its previous movement patterns, to simulate how the animal might navigate through the graph. By incorporating real-world data, such as GPS tracking or habitat information, the Bayesian network can produce synthetic trajectories that closely resemble the behavior of actual wildlife.
The researchers evaluate the performance of WildGraph on several datasets, including synthetic data generated from a 3D game engine and real-world GPS tracking data. Their results show that the synthetic trajectories generated by WildGraph can effectively capture the statistical properties and spatial-temporal patterns of real-world wildlife movement, making it a valuable tool for tasks like trajectory similarity search and multi-step trajectory prediction.
Critical Analysis
The WildGraph system represents an important step forward in the field of wildlife trajectory generation, but it is not without its limitations. One potential concern is the reliance on real-world data for calibrating the Bayesian network model, as the availability and quality of such data can vary significantly across different environments and species.
Additionally, the graph-based representation of the environment, while effective in capturing the spatial and temporal aspects of animal movement, may not fully account for the complex, context-dependent decision-making processes that often govern wildlife behavior. Further research may be needed to explore more sophisticated modeling approaches that can better capture the nuances of animal decision-making.
Despite these limitations, the WildGraph system represents an important contribution to the field of synthetic data generation for wildlife monitoring and conservation. As the researchers continue to refine and expand the system, it has the potential to become a valuable tool for researchers, conservationists, and policymakers working to understand and protect vulnerable animal populations.
Conclusion
The WildGraph system presented in this paper offers a novel approach to generating realistic synthetic trajectories of wildlife movement. By combining a graph-based representation of the environment with a Bayesian network model, the researchers have developed a system capable of producing synthetic data that closely resembles real-world animal behavior.
The potential applications of WildGraph are diverse, ranging from habitat monitoring and conservation planning to the development of advanced trajectory prediction algorithms. As the researchers continue to refine and expand the system, it is likely to become an increasingly valuable tool for researchers and practitioners working to understand and protect wildlife populations around the world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
WildGraph: Realistic Graph-based Trajectory Generation for Wildlife
Ali Al-Lawati, Elsayed Eshra, Prasenjit Mitra
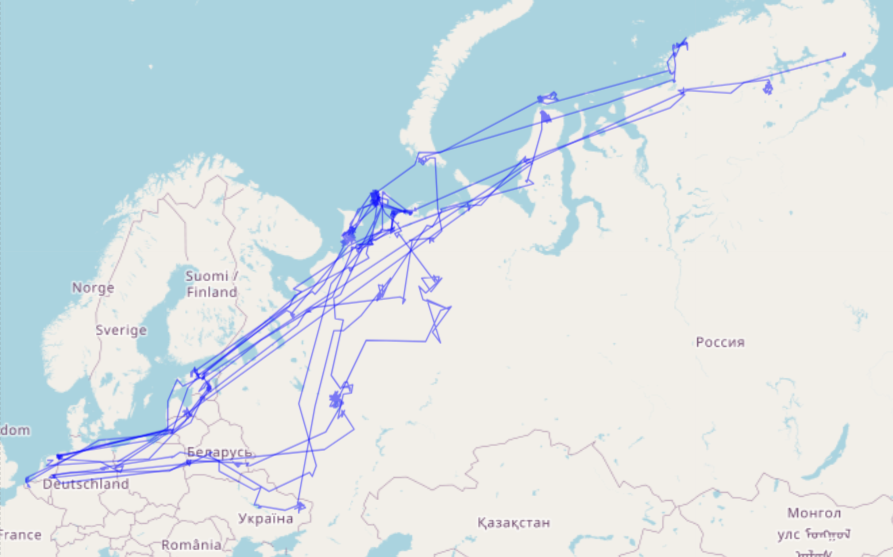
Trajectory generation is an important task in movement studies; it circumvents the privacy, ethical, and technical challenges of collecting real trajectories from the target population. In particular, real trajectories in the wildlife domain are scarce as a result of ethical and environmental constraints of the collection process. In this paper, we consider the problem of generating long-horizon trajectories, akin to wildlife migration, based on a small set of real samples. We propose a hierarchical approach to learn the global movement characteristics of the real dataset and recursively refine localized regions. Our solution, WildGraph, discretizes the geographic path into a prototype network of H3 (https://www.uber.com/blog/h3/) regions and leverages a recurrent variational auto-encoder to probabilistically generate paths over the regions, based on occupancy. WildGraph successfully generates realistic months-long trajectories using a sample size as small as 60. Experiments performed on two wildlife migration datasets demonstrate that our proposed method improves the generalization of the generated trajectories in comparison to existing work while achieving superior or comparable performance in several benchmark metrics. Our code is published on the following repository: url{https://github.com/aliwister/wildgraph}.
Read more4/15/2024

0
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Daeun Song, Jing Liang, Xuesu Xiao, Dinesh Manocha
We present a multi-modal trajectory generation and selection algorithm for real-world mapless outdoor navigation in challenging scenarios with unstructured off-road features like buildings, grass, and curbs. Our goal is to compute suitable trajectories that (1) satisfy the environment-specific traversability constraints and (2) generate human-like paths while navigating in crosswalks, sidewalks, etc. Our formulation uses a Conditional Variational Autoencoder (CVAE) generative model enhanced with traversability constraints to generate multiple candidate trajectories for global navigation. We use VLMs and a visual prompting approach with their zero-shot ability of semantic understanding and logical reasoning to choose the best trajectory given the contextual information about the task. We evaluate our methods in various outdoor scenes with wheeled robots and compare the performance with other global navigation algorithms. In practice, we observe at least 3.35% improvement in traversability and 20.61% improvement in terms of human-like navigation in generated trajectories in challenging outdoor navigation scenarios.
Read more8/9/2024
📉
0
Wild Visual Navigation: Fast Traversability Learning via Pre-Trained Models and Online Self-Supervision
Mat'ias Mattamala, Jonas Frey, Piotr Libera, Nived Chebrolu, Georg Martius, Cesar Cadena, Marco Hutter, Maurice Fallon
Natural environments such as forests and grasslands are challenging for robotic navigation because of the false perception of rigid obstacles from high grass, twigs, or bushes. In this work, we present Wild Visual Navigation (WVN), an online self-supervised learning system for visual traversability estimation. The system is able to continuously adapt from a short human demonstration in the field, only using onboard sensing and computing. One of the key ideas to achieve this is the use of high-dimensional features from pre-trained self-supervised models, which implicitly encode semantic information that massively simplifies the learning task. Further, the development of an online scheme for supervision generator enables concurrent training and inference of the learned model in the wild. We demonstrate our approach through diverse real-world deployments in forests, parks, and grasslands. Our system is able to bootstrap the traversable terrain segmentation in less than 5 min of in-field training time, enabling the robot to navigate in complex, previously unseen outdoor terrains. Code: https://bit.ly/498b0CV - Project page:https://bit.ly/3M6nMHH
Read more4/11/2024
🛸
0
G2LTraj: A Global-to-Local Generation Approach for Trajectory Prediction
Zhanwei Zhang, Zishuo Hua, Minghao Chen, Wei Lu, Binbin Lin, Deng Cai, Wenxiao Wang
Predicting future trajectories of traffic agents accurately holds substantial importance in various applications such as autonomous driving. Previous methods commonly infer all future steps of an agent either recursively or simultaneously. However, the recursive strategy suffers from the accumulated error, while the simultaneous strategy overlooks the constraints among future steps, resulting in kinematically infeasible predictions. To address these issues, in this paper, we propose G2LTraj, a plug-and-play global-to-local generation approach for trajectory prediction. Specifically, we generate a series of global key steps that uniformly cover the entire future time range. Subsequently, the local intermediate steps between the adjacent key steps are recursively filled in. In this way, we prevent the accumulated error from propagating beyond the adjacent key steps. Moreover, to boost the kinematical feasibility, we not only introduce the spatial constraints among key steps but also strengthen the temporal constraints among the intermediate steps. Finally, to ensure the optimal granularity of key steps, we design a selectable granularity strategy that caters to each predicted trajectory. Our G2LTraj significantly improves the performance of seven existing trajectory predictors across the ETH, UCY and nuScenes datasets. Experimental results demonstrate its effectiveness. Code will be available at https://github.com/Zhanwei-Z/G2LTraj.
Read more5/1/2024