Accuracy Evaluation of a Lightweight Analytic Vehicle Dynamics Model for Maneuver Planning

0
🎯
Sign in to get full access
Overview
- Automated driving systems rely on models of vehicle dynamics to plan safe and efficient maneuvers
- These models range in complexity, often trading off accuracy for computational speed to meet real-time requirements
- The paper proposes a vehicle dynamics model that supports both analytic and generative approaches to maneuver planning
- The model is evaluated through real-world testing on a closed track and public roads to analyze the effects of simplifying assumptions
Plain English Explanation
Automated driving systems, like self-driving cars, need to be able to plan and execute complex maneuvers to navigate safely. To do this, they rely on models of vehicle dynamics - mathematical representations of how a vehicle moves and responds to driver inputs.
These models can range from simple to highly complex, with tradeoffs between accuracy and computational speed. Since automated driving systems often need to quickly evaluate many potential trajectories, they tend to use models that make simplifying assumptions to reduce complexity and enable real-time performance.
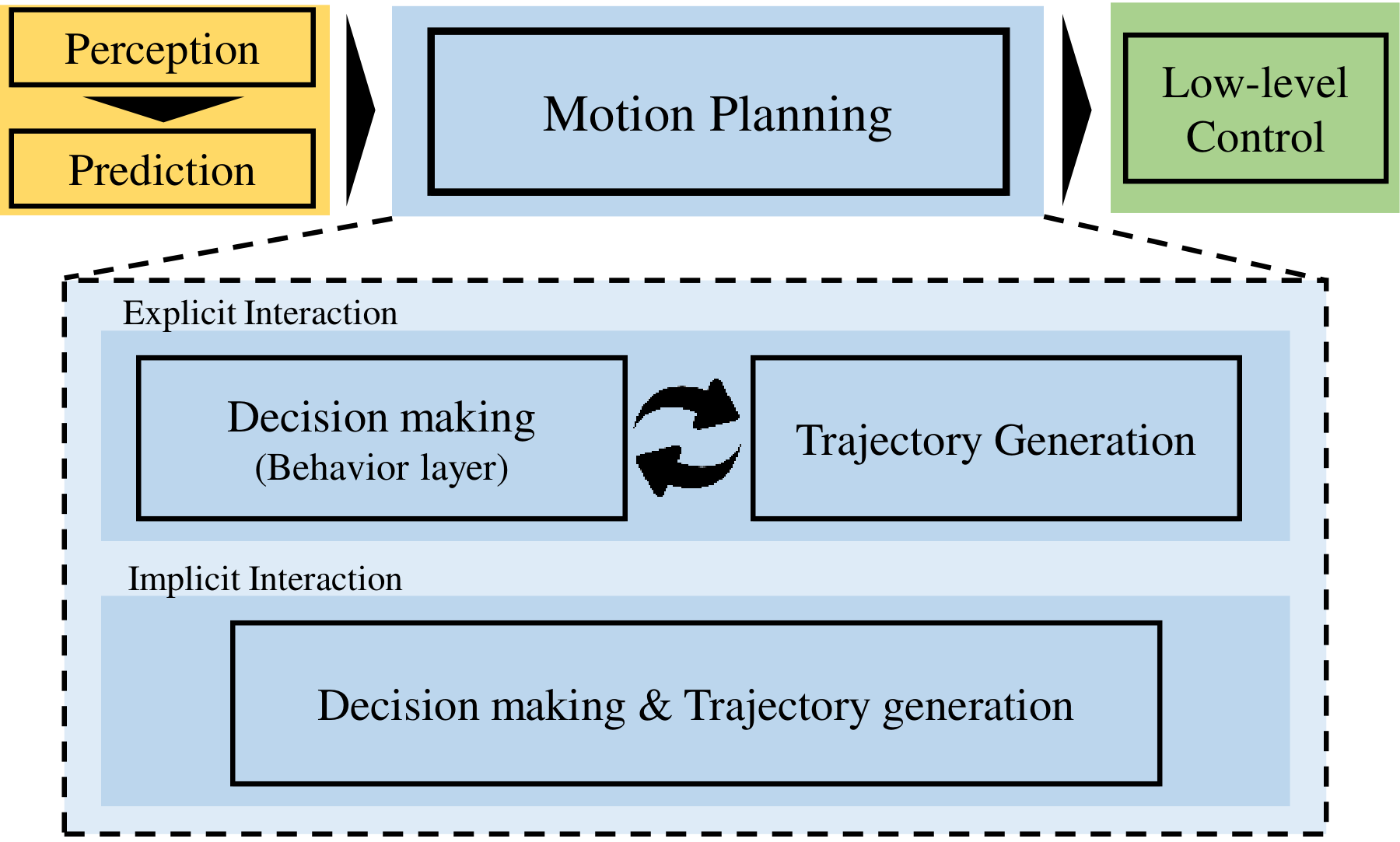
The researchers in this paper propose a new vehicle dynamics model that supports both analytic and generative approaches to maneuver planning. The analytic approach allows extracting parameters from a given trajectory, while the generative approach can establish a trajectory from control inputs.
To evaluate their model, the researchers tested it in real-world conditions, both on a closed test track and on public roads. This allowed them to analyze how the simplifying assumptions in their model affected its performance under dynamic, real-world driving scenarios.
Technical Explanation
The paper presents a vehicle dynamics model that supports both analytic and generative approaches to maneuver planning for automated driving systems.
In the analytic approach, the model can extract relevant parameters from a given trajectory, such as the vehicle's speed, acceleration, and steering angle. This allows the system to evaluate a proposed trajectory against criteria like safety, comfort, and efficiency.
The generative approach, on the other hand, uses the model to establish a trajectory based on control inputs like throttle, brake, and steering. This enables the system to plan optimal maneuvers by generating and testing many potential trajectories.
To evaluate the model, the researchers conducted real-world testing under dynamic conditions, both on a closed test track and on public roads. This allowed them to analyze the effects of the model's simplifying assumptions, such as linearized tire and suspension dynamics, on its performance in realistic driving scenarios.
The results of these experiments showed that the proposed model was able to accurately capture the key aspects of vehicle behavior required for maneuver planning, while still maintaining the computational efficiency needed for real-time applications. However, the researchers also identified some edge cases where the simplifying assumptions led to noticeable deviations from actual vehicle behavior, suggesting areas for further refinement.
Critical Analysis
The paper presents a well-designed study that evaluates a vehicle dynamics model in both controlled and real-world driving conditions. By testing the model's performance under dynamic, challenging scenarios, the researchers were able to uncover the limitations of their simplifying assumptions and identify areas for potential improvement.
One notable aspect of the study is the use of both analytic and generative approaches to maneuver planning. This highlights the versatility of the proposed model and its ability to support a range of automated driving applications, from trajectory evaluation to trajectory generation.
However, the paper does not provide a detailed analysis of the computational complexity and resource requirements of the model, which would be important considerations for real-world deployment in resource-constrained autonomous vehicle systems. Additionally, the researchers do not address the potential impact of sensor noise or environmental factors, such as weather and road conditions, on the model's performance.
Further research could explore differentiable approaches to vehicle dynamics modeling, which may offer improved accuracy and flexibility while maintaining computational efficiency. Studies on the robustness of trajectory prediction in the face of uncertainties would also be valuable for advancing the state of the art in this field.
Conclusion
The proposed vehicle dynamics model offers a promising approach to maneuver planning for automated driving systems, balancing the need for computational efficiency with the ability to accurately capture real-world vehicle behavior. By evaluating the model in both controlled and dynamic driving conditions, the researchers have provided valuable insights into the strengths and limitations of their approach.
While further refinement and testing may be required, this work represents an important contribution to the ongoing efforts to develop safe and reliable autonomous driving technologies. As the field of automated driving continues to evolve, research like this will play a crucial role in pushing the boundaries of what is possible and ensuring that self-driving vehicles can navigate the complexities of the real world with confidence and precision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🎯
0
Accuracy Evaluation of a Lightweight Analytic Vehicle Dynamics Model for Maneuver Planning
J. R. Ziehn, M. Ruf, M. Roschani, J. Beyerer
Models for vehicle dynamics play an important role in maneuver planning for automated driving. They are used to derive trajectories from given control inputs, or to evaluate a given trajectory in terms of constraint violation or optimality criteria such as safety, comfort or ecology. Depending on the computation process, models with different assumptions and levels of detail are used; since maneuver planning usually has strong requirements for computation speed at a potentially high number of trajectory evaluations per planning cycle, most of the applied models aim to reduce complexity by implicitly or explicitly introducing simplifying assumptions. While evaluations show that these assumptions may be sufficiently valid under typical conditions, their effect has yet to be studied conclusively. We propose a model for vehicle dynamics that is convenient for maneuver planning by supporting both an analytic approach of extracting parameters from a given trajectory, and a generative approach of establishing a trajectory from given control inputs. Both applications of the model are evaluated in real-world test drives under dynamic conditions, both on a closed-off test track and on public roads, and effects arising from the simplifying assumptions are analyzed.
Read more5/15/2024
🏋️
0
Pseudo-kinematic trajectory control of tracked vehicles
Michele Focchi, Daniele Fontanelli, Luigi Palopoli
Tracked vehicles are used in complex scenarios, where motion planning and navigation can be very complex. They have complex dynamics, with many parameters that are difficult to identify and that change significantly based on the operating conditions. We propose a simple pseudo-kinematic model, where the intricate dynamic effects underlying the vehicle's motion are captured in a small set of velocity-dependent parameters. This choice enables the development of a Lyapunov-based trajectory controller with guaranteed performance and small computation time. We demonstrate the correctness of our approach with both simulation and experimental data.
Read more9/30/2024
🔍
0
Consideration of Vehicle Characteristics on the Motion Planner Algorithm
Syed Adil Ahmed, Taehyun Shim
Autonomous vehicle control is generally divided in two main areas; trajectory planning and tracking. Currently, the trajectory planning is mostly done by particle or kinematic model-based optimization controllers. The output of these planners, since they do not consider CG height and its effects, is not unique for different vehicle types, especially for high CG vehicles. As a result, the tracking controller may have to work hard to avoid vehicle handling and comfort constraints while trying to realize these sub-optimal trajectories. This paper tries to address this problem by considering a planner with simplified double track model with estimation of lateral and roll based load transfer using steady state equations and a simplified tire model to reduce solver workload. The developed planner is compared with the widely used particle and kinematic model planners in collision avoidance scenarios in both high and low acceleration conditions and with different vehicle heights.
Read more7/24/2024
0
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
Read more6/11/2024