Advancing Behavior Generation in Mobile Robotics through High-Fidelity Procedural Simulations

0

Sign in to get full access
Overview
- This paper explores the use of high-fidelity procedural simulations to advance behavior generation in mobile robotics.
- The researchers developed a simulation environment that can generate diverse and realistic environments for training and evaluating robotic agents.
- The paper presents several case studies demonstrating how this simulation approach can be used to train agents for tasks like navigation, manipulation, and language understanding.
Plain English Explanation
The researchers in this paper are working on making robots better at figuring out how to behave in different situations. They've created a simulation environment that can generate lots of different virtual worlds for the robots to practice in. These virtual worlds are very realistic, with detailed objects, textures, and physics. This allows the robots to learn how to navigate, pick up and move things, and even understand natural language instructions, all in a safe and controlled environment before trying it out in the real world.
The key idea is that by training robots in these highly varied and realistic simulated environments, they can learn more flexible and robust behaviors that will work well in the real world. This is an important step towards making robots that can seamlessly interact with and assist humans in a wide range of everyday situations. The Efficient Learning Control Framework for Sim-to-Real Transfer and Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer are examples of related research in this area.
Technical Explanation
The researchers developed a procedural simulation engine that can generate diverse 3D environments with realistic physics, textures, and lighting. These environments serve as a testbed for training and evaluating robotic agents on various tasks, including navigation, manipulation, and language understanding.
The key innovation is the use of procedural generation techniques to create a wide variety of environments, rather than relying on manually-designed static scenes. This allows the simulation to capture the complexity and variability of real-world environments, which is crucial for developing robust and generalizable robotic behaviors.
The paper presents several case studies demonstrating the capabilities of this simulation framework. For example, the researchers trained a deep reinforcement learning agent to navigate through cluttered indoor environments, and another agent to follow natural language instructions for object manipulation tasks. By testing the agents in diverse procedurally-generated scenarios, the researchers were able to assess their generalization abilities and identify strengths and weaknesses.
The Embodied Agents for Efficient Exploration and Smart Scene Description and Semi-autonomous Robotic Disassembly Enhanced by Mixed Reality papers explore related approaches to training embodied AI agents in virtual environments.
Critical Analysis
The researchers acknowledge several limitations of their approach. First, while the procedural simulation can generate a wide variety of environments, it may still fail to capture the full complexity and unpredictability of the real world. Additionally, there are challenges in bridging the "sim-to-real" gap, where behaviors learned in simulation do not necessarily transfer seamlessly to the physical world.
Another potential issue is the computational cost of running these high-fidelity simulations, which may limit their scalability and accessibility. The researchers mention that they are exploring ways to optimize the simulation performance and reduce the computational burden.
It would also be useful to see more detailed evaluations of the trained agents' performance, both in simulation and in real-world deployment. The paper provides some promising results, but more comprehensive testing and benchmarking would help establish the practical value of this approach.
Overall, the researchers have made an important contribution by demonstrating the potential of high-fidelity procedural simulations for advancing behavior generation in mobile robotics. However, further research is needed to address the remaining challenges and fully realize the benefits of this approach.
Conclusion
This paper presents a novel simulation-based approach to developing more capable and versatile mobile robots. By leveraging procedural generation techniques, the researchers have created a highly realistic and diverse virtual environment for training and evaluating robotic agents.
The case studies showcased in the paper suggest that this simulation-based approach can lead to significant advancements in areas like navigation, manipulation, and language understanding. As robots continue to play an increasingly important role in our everyday lives, tools like this that can accelerate their development and deployment will become increasingly valuable.
While there are still some challenges to overcome, the ideas and methods introduced in this paper represent an important step forward in the field of mobile robotics. The Humanoid Gym: Reinforcement Learning for Humanoid Robot from Zero is another example of research exploring the use of simulation environments to train embodied AI agents.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Advancing Behavior Generation in Mobile Robotics through High-Fidelity Procedural Simulations
Victor A. Kich, Jair A. Bottega, Raul Steinmetz, Ricardo B. Grando, Ayanori Yorozu, Akihisa Ohya
This paper introduces YamaS, a simulator integrating Unity3D Engine with Robotic Operating System for robot navigation research and aims to facilitate the development of both Deep Reinforcement Learning (Deep-RL) and Natural Language Processing (NLP). It supports single and multi-agent configurations with features like procedural environment generation, RGB vision, and dynamic obstacle navigation. Unique to YamaS is its ability to construct single and multi-agent environments, as well as generating agent's behaviour through textual descriptions. The simulator's fidelity is underscored by comparisons with the real-world Yamabiko Beego robot, demonstrating high accuracy in sensor simulations and spatial reasoning. Moreover, YamaS integrates Virtual Reality (VR) to augment Human-Robot Interaction (HRI) studies, providing an immersive platform for developers and researchers. This fusion establishes YamaS as a versatile and valuable tool for the development and testing of autonomous systems, contributing to the fields of robot simulation and AI-driven training methodologies.
Read more5/28/2024
📊
0
GRADE: Generating Realistic And Dynamic Environments for Robotics Research with Isaac Sim
Elia Bonetto, Chenghao Xu, Aamir Ahmad
Synthetic data and novel rendering techniques have greatly influenced computer vision research in tasks like target tracking and human pose estimation. However, robotics research has lagged behind in leveraging it due to the limitations of most simulation frameworks, including the lack of low-level software control and flexibility, Robot Operating System integration, realistic physics, or photorealism. This hindered progress in (visual-)perception research, e.g. in autonomous robotics, especially in dynamic environments. Visual Simultaneous Localization and Mapping (V-SLAM), for instance, has been mostly developed passively, in static environments, and evaluated on few pre-recorded dynamic datasets due to the difficulties of realistically simulating dynamic worlds and the huge sim-to-real gap. To address these challenges, we present GRADE (Generating Realistic and Dynamic Environments), a highly customizable framework built upon NVIDIA Isaac Sim. We leverage Isaac's rendering capabilities and low-level APIs to populate and control the simulation, collect ground-truth data, and test online and offline approaches. Importantly, we introduce a new way to precisely repeat a recorded experiment within a physically enabled simulation while allowing environmental and simulation changes. Next, we collect a synthetic dataset of richly annotated videos in dynamic environments with a flying drone. Using that, we train detection and segmentation models for humans, closing the syn-to-real gap. Finally, we benchmark state-of-the-art dynamic V-SLAM algorithms, revealing their short tracking times and low generalization capabilities. We also show for the first time that the top-performing deep learning models do not achieve the best SLAM performance. Code and data are provided as open-source at https://grade.is.tue.mpg.de.
Read more8/23/2024
0
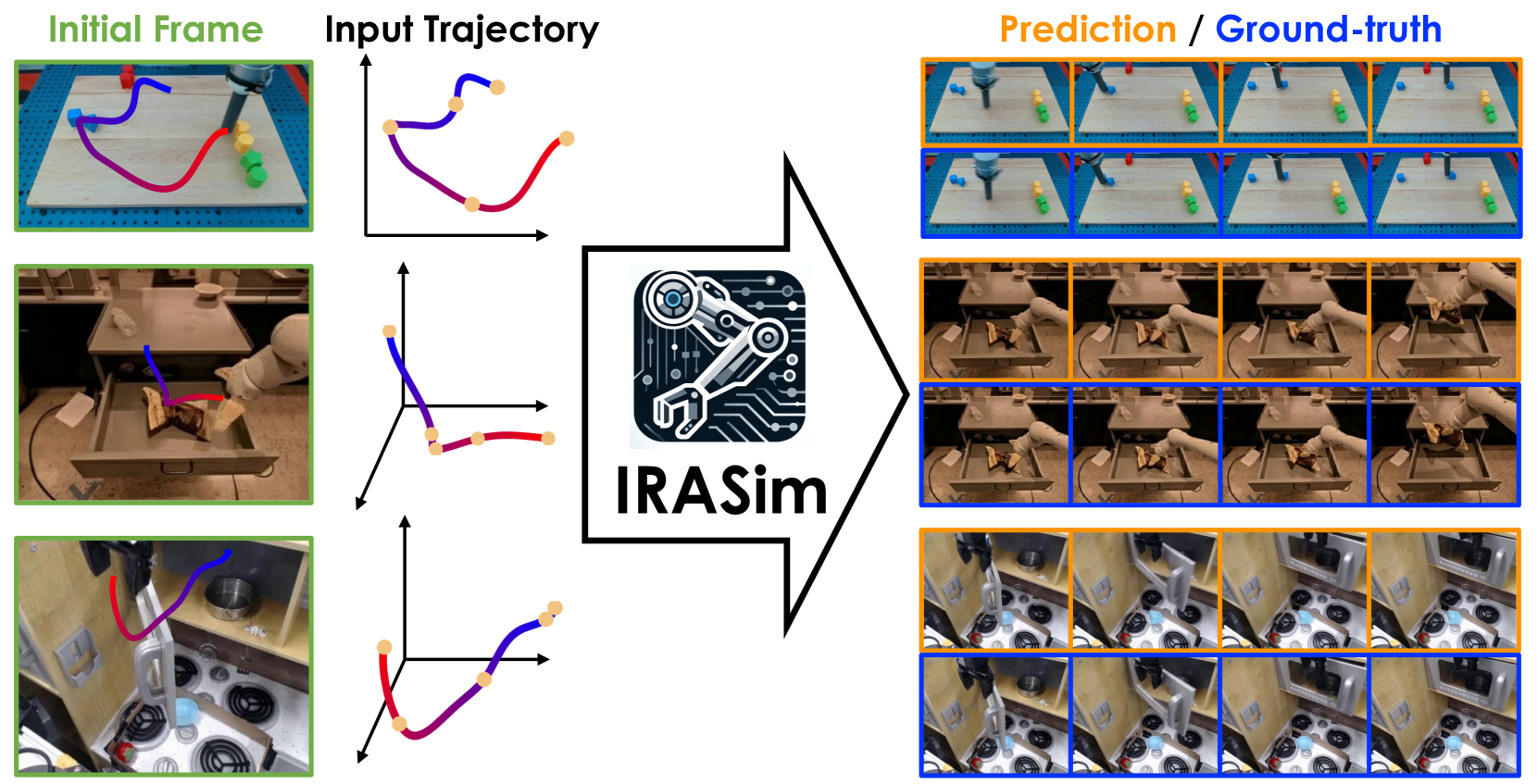
IRASim: Learning Interactive Real-Robot Action Simulators
Fangqi Zhu, Hongtao Wu, Song Guo, Yuxiao Liu, Chilam Cheang, Tao Kong
Scalable robot learning in the real world is limited by the cost and safety issues of real robots. In addition, rolling out robot trajectories in the real world can be time-consuming and labor-intensive. In this paper, we propose to learn an interactive real-robot action simulator as an alternative. We introduce a novel method, IRASim, which leverages the power of generative models to generate extremely realistic videos of a robot arm that executes a given action trajectory, starting from an initial given frame. To validate the effectiveness of our method, we create a new benchmark, IRASim Benchmark, based on three real-robot datasets and perform extensive experiments on the benchmark. Results show that IRASim outperforms all the baseline methods and is more preferable in human evaluations. We hope that IRASim can serve as an effective and scalable approach to enhance robot learning in the real world. To promote research for generative real-robot action simulators, we open-source code, benchmark, and checkpoints at https: //gen-irasim.github.io.
Read more6/21/2024

0
VR Isle Academy: A VR Digital Twin Approach for Robotic Surgical Skill Development
Achilleas Filippidis, Nikolaos Marmaras, Michael Maravgakis, Alexandra Plexousaki, Manos Kamarianakis, George Papagiannakis
Contemporary progress in the field of robotics, marked by improved efficiency and stability, has paved the way for the global adoption of surgical robotic systems (SRS). While these systems enhance surgeons' skills by offering a more accurate and less invasive approach to operations, they come at a considerable cost. Moreover, SRS components often involve heavy machinery, making the training process challenging due to limited access to such equipment. In this paper we introduce a cost-effective way to facilitate training for a simulator of a SRS via a portable, device-agnostic, ultra realistic simulation with hand tracking and feet tracking support. Error assessment is accessible in both real-time and offline, which enables the monitoring and tracking of users' performance. The VR application has been objectively evaluated by several untrained testers showcasing significant reduction in error metrics as the number of training sessions increases. This indicates that the proposed VR application denoted as VR Isle Academy operates efficiently, improving the robot - controlling skills of the testers in an intuitive and immersive way towards reducing the learning curve at minimal cost.
Read more7/2/2024