Belief-State Query Policies for Planning With Preferences Under Partial Observability

0
Sign in to get full access
Overview
- This paper explores belief-state query policies for planning with preferences under partial observability.
- The researchers present a framework for planning with preferences in partially observable environments and develop belief-state query policies to efficiently gather information.
- They evaluate their approach on several benchmark problems and demonstrate its effectiveness in finding high-quality solutions while minimizing the number of queries.
Plain English Explanation
In many real-world decision-making scenarios, we face situations where we don't have complete information about the environment. This is known as partial observability. For example, a self-driving car may not be able to see around corners or through dense fog, limiting its understanding of the full driving environment.
When making decisions in partially observable environments, it's important to consider our preferences - what outcomes we value most. The researchers in this paper tackle the challenge of planning with preferences under partial observability.
They propose a framework that allows an agent to strategically query its beliefs about the environment in order to find high-quality solutions that align with its preferences. By carefully selecting which information to gather, the agent can make more informed decisions without the need to fully observe the entire environment.
The researchers evaluate their belief-state query policies on a variety of benchmark problems, showing that their approach can find good solutions while minimizing the number of queries. This is an important capability, as reducing the need for information gathering can make decision-making more efficient and practical in real-world scenarios with partial observability.
Technical Explanation
The researchers present a framework for planning with preferences under partial observability. They model the problem as a Partially Observable Markov Decision Process (POMDP) and introduce belief-state query policies to efficiently gather information about the environment.
The key idea is to allow the agent to selectively query its beliefs about the state of the environment, rather than attempting to fully observe everything. By strategically choosing which information to gather, the agent can make more informed decisions while minimizing the number of queries.
The researchers develop several belief-state query policies, including an optimal policy that provably minimizes the number of queries, as well as approximate policies that balance solution quality and query efficiency. They evaluate these policies on a range of benchmark problems, including some inspired by algorithmic persuasion through simulation and imprecise probabilities in partially observable settings.
The results show that the belief-state query policies can find high-quality solutions while significantly reducing the number of queries compared to a baseline that fully observes the environment. This demonstrates the potential of their approach to enable efficient decision-making in complex, partially observable domains.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. One key limitation is that their optimal belief-state query policy may be computationally expensive to compute, especially for larger problem instances. The researchers suggest exploring approximation techniques to make the optimal policy more scalable.
Additionally, the paper focuses on planning with static preferences, but in many real-world scenarios, preferences may evolve over time or be influenced by the decision-making process itself. Extending the framework to handle dynamic preferences could be an interesting avenue for future work.
Another potential area for improvement is the handling of uncertainty in the agent's beliefs. The current framework assumes that the agent can query its beliefs with perfect accuracy, but in practice, beliefs may be imperfect or noisy. Incorporating more robust belief representations could enhance the framework's ability to reason under uncertainty.
Overall, the researchers have presented an interesting and promising approach for planning with preferences under partial observability. While there are some limitations, the work opens up new directions for efficient decision-making in complex, real-world environments with incomplete information.
Conclusion
This paper introduces a framework for planning with preferences under partial observability, a common challenge in many real-world decision-making scenarios. The researchers develop belief-state query policies that allow an agent to strategically gather information about the environment, enabling it to find high-quality solutions that align with its preferences while minimizing the number of queries.
The evaluation results demonstrate the effectiveness of the researchers' approach, showing its potential to enable efficient decision-making in partially observable domains. While the paper identifies some limitations and areas for future work, it represents an important step forward in addressing the challenges of planning under partial observability and uncertain preferences.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Belief-State Query Policies for Planning With Preferences Under Partial Observability
Daniel Bramblett, Siddharth Srivastava
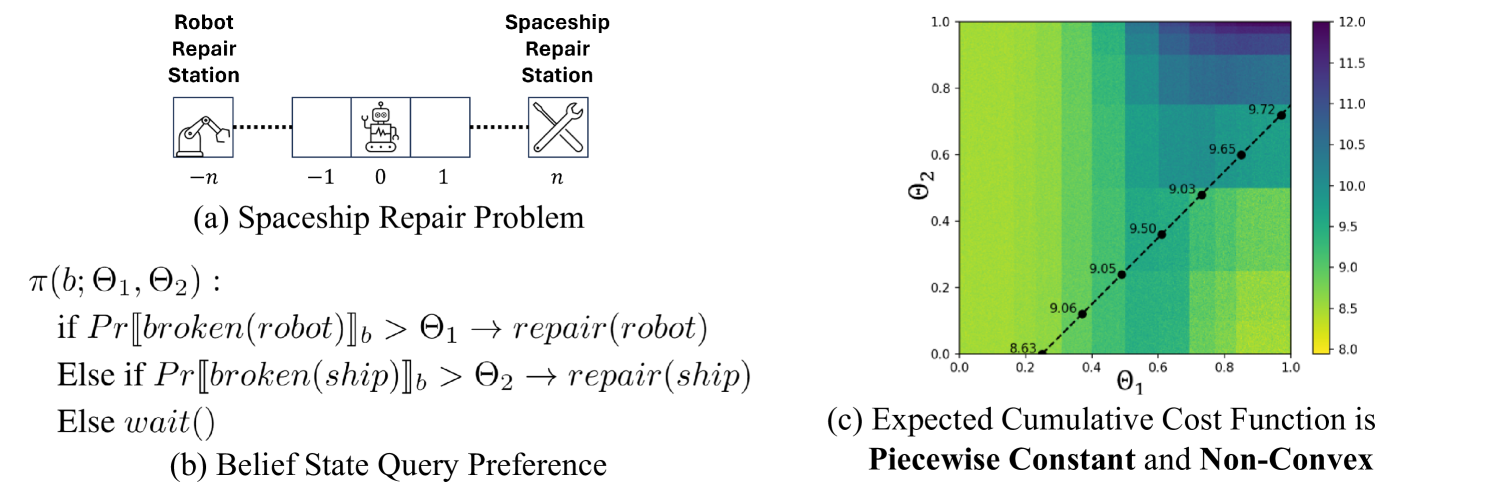
Planning in real-world settings often entails addressing partial observability while aligning with users' preferences. We present a novel framework for expressing users' preferences about agent behavior in a partially observable setting using parameterized belief-state query (BSQ) preferences in the setting of goal-oriented partially observable Markov decision processes (gPOMDPs). We present the first formal analysis of such preferences and prove that while the expected value of a BSQ preference is not a convex function w.r.t its parameters, it is piecewise constant and yields an implicit discrete parameter search space that is finite for finite horizons. This theoretical result leads to novel algorithms that optimize gPOMDP agent behavior while guaranteeing user preference compliance. Theoretical analysis proves that our algorithms converge to the optimal preference-compliant behavior in the limit. Empirical results show that BSQ preferences provide a computationally feasible approach for planning with preferences in partially observable settings.
Read more5/28/2024
🌿
0
BetaZero: Belief-State Planning for Long-Horizon POMDPs using Learned Approximations
Robert J. Moss, Anthony Corso, Jef Caers, Mykel J. Kochenderfer
Real-world planning problems, including autonomous driving and sustainable energy applications like carbon storage and resource exploration, have recently been modeled as partially observable Markov decision processes (POMDPs) and solved using approximate methods. To solve high-dimensional POMDPs in practice, state-of-the-art methods use online planning with problem-specific heuristics to reduce planning horizons and make the problems tractable. Algorithms that learn approximations to replace heuristics have recently found success in large-scale fully observable domains. The key insight is the combination of online Monte Carlo tree search with offline neural network approximations of the optimal policy and value function. In this work, we bring this insight to partially observable domains and propose BetaZero, a belief-state planning algorithm for high-dimensional POMDPs. BetaZero learns offline approximations that replace heuristics to enable online decision making in long-horizon problems. We address several challenges inherent in large-scale partially observable domains; namely challenges of transitioning in stochastic environments, prioritizing action branching with a limited search budget, and representing beliefs as input to the network. To formalize the use of all limited search information, we train against a novel $Q$-weighted visit counts policy. We test BetaZero on various well-established POMDP benchmarks found in the literature and a real-world problem of critical mineral exploration. Experiments show that BetaZero outperforms state-of-the-art POMDP solvers on a variety of tasks.
Read more8/1/2024

0
Periodic agent-state based Q-learning for POMDPs
Amit Sinha, Mathieu Geist, Aditya Mahajan
The standard approach for Partially Observable Markov Decision Processes (POMDPs) is to convert them to a fully observed belief-state MDP. However, the belief state depends on the system model and is therefore not viable in reinforcement learning (RL) settings. A widely used alternative is to use an agent state, which is a model-free, recursively updateable function of the observation history. Examples include frame stacking and recurrent neural networks. Since the agent state is model-free, it is used to adapt standard RL algorithms to POMDPs. However, standard RL algorithms like Q-learning learn a stationary policy. Our main thesis that we illustrate via examples is that because the agent state does not satisfy the Markov property, non-stationary agent-state based policies can outperform stationary ones. To leverage this feature, we propose PASQL (periodic agent-state based Q-learning), which is a variant of agent-state-based Q-learning that learns periodic policies. By combining ideas from periodic Markov chains and stochastic approximation, we rigorously establish that PASQL converges to a cyclic limit and characterize the approximation error of the converged periodic policy. Finally, we present a numerical experiment to highlight the salient features of PASQL and demonstrate the benefit of learning periodic policies over stationary policies.
Read more8/21/2024
🏅
0
Provable Representation with Efficient Planning for Partial Observable Reinforcement Learning
Hongming Zhang, Tongzheng Ren, Chenjun Xiao, Dale Schuurmans, Bo Dai
In most real-world reinforcement learning applications, state information is only partially observable, which breaks the Markov decision process assumption and leads to inferior performance for algorithms that conflate observations with state. Partially Observable Markov Decision Processes (POMDPs), on the other hand, provide a general framework that allows for partial observability to be accounted for in learning, exploration and planning, but presents significant computational and statistical challenges. To address these difficulties, we develop a representation-based perspective that leads to a coherent framework and tractable algorithmic approach for practical reinforcement learning from partial observations. We provide a theoretical analysis for justifying the statistical efficiency of the proposed algorithm, and also empirically demonstrate the proposed algorithm can surpass state-of-the-art performance with partial observations across various benchmarks, advancing reliable reinforcement learning towards more practical applications.
Read more6/12/2024