COBRA -- COnfidence score Based on shape Regression Analysis for method-independent quality assessment of object pose estimation from single images

0
↗️
Sign in to get full access
Overview
- Presents a generic algorithm for scoring pose estimation methods that rely on single image semantic analysis
- Uses a lightweight putative shape representation with multiple Gaussian Processes (GPs) to provide a geometric evaluation framework
- Confidence measure based on the average mixture probability of pixel back-projections onto the shape template
- Compares accuracy of GP-based representation to actual geometric models and demonstrates ability to capture influence of outliers
Plain English Explanation
The provided research paper introduces a new algorithm for evaluating the accuracy of methods that estimate the position and orientation (pose) of objects in single images. These pose estimation techniques often rely on analyzing the semantic content of the image, such as identifying the different objects present.
The key idea behind the new algorithm is to use a simplified 3D shape representation of the objects, built using a combination of multiple Gaussian Processes. Each Gaussian Process provides a way to measure the distance from different reference points on the object's surface to its actual surface. This creates a geometric framework for scoring how well a predicted pose matches the object's true shape.
The algorithm also includes a confidence measure, which looks at how well the pixels in the image match back to the shape template. The higher the average "match probability" of the pixels, the more confident the algorithm is in the predicted pose.
The researchers compared this GP-based shape representation to the actual 3D models of the objects. They found that their approach was able to capture the influence of outliers - elements in the image that don't match the object - better than relying solely on the intrinsic measures provided by the segmentation and pose estimation methods.
Technical Explanation
The key technical innovation presented in the paper is the use of a lightweight putative shape representation built from multiple Gaussian Processes (GPs). Each GP models the distance distributions from reference points on the object's surface to the actual surface, providing a geometric evaluation framework.
The confidence measure is calculated as the average mixture probability of pixel back-projections onto the shape template. This allows the algorithm to account for the influence of outliers, which can be missed by the intrinsic measures provided by the segmentation and pose estimation methods.
In the experiments, the researchers compared the accuracy of the GP-based shape representation to the actual 3D geometric models of the objects. They demonstrated that their approach could effectively capture the impact of outliers, in contrast to the standard intrinsic measures.
Critical Analysis
The paper presents a novel and promising approach for evaluating pose estimation methods, addressing an important challenge in this field. By using a flexible, probabilistic shape representation, the algorithm can account for sources of error that may be missed by other evaluation metrics.
However, the paper does not provide a detailed analysis of the limitations or potential issues with the proposed approach. For example, it is unclear how the algorithm would perform with highly complex or occluded objects, or how sensitive it is to the choice of reference points and other hyperparameters.
Additionally, the experiments are relatively limited in scope, focusing on a small set of objects and pose estimation methods. Further research would be needed to understand the broader applicability and generalizability of the approach, as well as its performance compared to other state-of-the-art evaluation techniques, such as those presented in Improving Robustness of 3D Human Pose Estimation on Benchmarks and Metric-Guided Image Reconstruction Bounds via Conformal Prediction.
Conclusion
The paper introduces a novel algorithm for scoring pose estimation methods that rely on single image semantic analysis. The key innovation is the use of a lightweight, probabilistic shape representation based on Gaussian Processes, which allows the algorithm to capture the influence of outliers in a way that standard intrinsic measures cannot.
While the results are promising, further research is needed to fully understand the limitations and broader applicability of the approach. Nonetheless, this work represents an important step forward in developing more robust and comprehensive evaluation frameworks for pose estimation techniques, which are crucial for advancing the state of the art in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
COBRA -- COnfidence score Based on shape Regression Analysis for method-independent quality assessment of object pose estimation from single images
Panagiotis Sapoutzoglou, George Giapitzakis, George Terzakis, Maria Pateraki
We present a generic algorithm for scoring pose estimation methods that rely on single image semantic analysis. The algorithm employs a lightweight putative shape representation using a combination of multiple Gaussian Processes. Each Gaussian Process (GP) yields distance normal distributions from multiple reference points in the object's coordinate system to its surface, thus providing a geometric evaluation framework for scoring predicted poses. Our confidence measure comprises the average mixture probability of pixel back-projections onto the shape template. In the reported experiments, we compare the accuracy of our GP based representation of objects versus the actual geometric models and demonstrate the ability of our method to capture the influence of outliers as opposed to the corresponding intrinsic measures that ship with the segmentation and pose estimation methods.
Read more9/17/2024

0
New!End-to-End Probabilistic Geometry-Guided Regression for 6DoF Object Pose Estimation
Thomas Pollabauer, Jiayin Li, Volker Knauthe, Sarah Berkei, Arjan Kuijper
6D object pose estimation is the problem of identifying the position and orientation of an object relative to a chosen coordinate system, which is a core technology for modern XR applications. State-of-the-art 6D object pose estimators directly predict an object pose given an object observation. Due to the ill-posed nature of the pose estimation problem, where multiple different poses can correspond to a single observation, generating additional plausible estimates per observation can be valuable. To address this, we reformulate the state-of-the-art algorithm GDRNPP and introduce EPRO-GDR (End-to-End Probabilistic Geometry-Guided Regression). Instead of predicting a single pose per detection, we estimate a probability density distribution of the pose. Using the evaluation procedure defined by the BOP (Benchmark for 6D Object Pose Estimation) Challenge, we test our approach on four of its core datasets and demonstrate superior quantitative results for EPRO-GDR on LM-O, YCB-V, and ITODD. Our probabilistic solution shows that predicting a pose distribution instead of a single pose can improve state-of-the-art single-view pose estimation while providing the additional benefit of being able to sample multiple meaningful pose candidates.
Read more9/19/2024

0
A Bayesian framework for active object recognition, pose estimation and shape transfer learning through touch
Haodong Zheng, Andrei Jalba, Raymond H. Cuijpers, Wijnand IJsselsteijn, Sanne Schoenmakers
As humans can explore and understand the world through the sense of touch, tactile sensing is also an important aspect of robotic perception. In unstructured environments, robots can encounter both known and novel objects, this calls for a method to address both known and novel objects. In this study, we combine a particle filter (PF) and Gaussian process implicit surface (GPIS) in a unified Bayesian framework. The framework can differentiate between known and novel objects, perform object recognition, estimate pose for known objects, and reconstruct shapes for unknown objects, in an active learning fashion. By grounding the selection of the GPIS prior with the maximum-likelihood-estimation (MLE) shape from the PF, the knowledge about known objects' shapes can be transferred to learn novel shapes. An exploration procedure with global shape estimation is proposed to guide active data acquisition and conclude the exploration when sufficient information is obtained. The performance of the proposed Bayesian framework is evaluated through simulations on known and novel objects, initialized with random poses. The results show that the proposed exploration procedure, utilizing global shape estimation, achieves faster exploration than a local exploration procedure based on rapidly explore random tree (RRT). Overall, our results indicate that the proposed framework is effective and efficient in object recognition, pose estimation and shape reconstruction. Moreover, we show that a learned shape can be included as a new prior and used effectively for future object recognition and pose estimation.
Read more9/16/2024
0
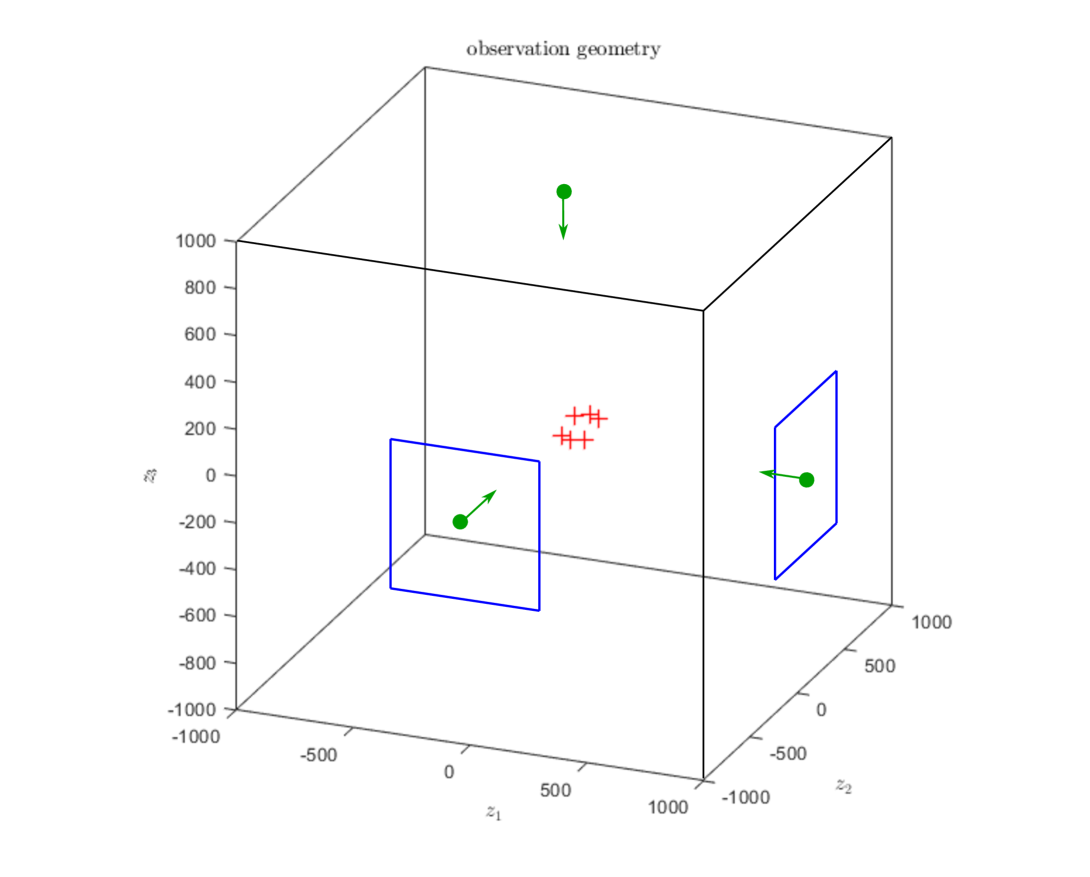
A Stochastic-Geometrical Framework for Object Pose Estimation based on Mixture Models Avoiding the Correspondence Problem
Wolfgang Hoegele
Background: Pose estimation of rigid objects is a practical challenge in optical metrology and computer vision. This paper presents a novel stochastic-geometrical modeling framework for object pose estimation based on observing multiple feature points. Methods: This framework utilizes mixture models for feature point densities in object space and for interpreting real measurements. Advantages are the avoidance to resolve individual feature correspondences and to incorporate correct stochastic dependencies in multi-view applications. First, the general modeling framework is presented, second, a general algorithm for pose estimation is derived, and third, two example models (camera and lateration setup) are presented. Results: Numerical experiments show the effectiveness of this modeling and general algorithm by presenting four simulation scenarios for three observation systems, including the dependence on measurement resolution, object deformations and measurement noise. Probabilistic modeling utilizing mixture models shows the potential for accurate and robust pose estimations while avoiding the correspondence problem.
Read more6/4/2024