A Stochastic-Geometrical Framework for Object Pose Estimation based on Mixture Models Avoiding the Correspondence Problem

0
Sign in to get full access
Overview
- This paper presents a stochastic-geometrical framework for estimating the pose (orientation and position) of objects in 3D space.
- The proposed approach aims to avoid the "correspondence problem" that arises when trying to match 3D object features to their 2D projections in an image.
- The framework uses mixture models to probabilistically describe the relationship between 3D object features and their 2D image projections.
Plain English Explanation
The paper introduces a new way to figure out the orientation and position of objects in 3D space based on camera images. One of the challenges in this type of 3D pose estimation is the "correspondence problem" - trying to match up the 3D features of an object (like corners or edges) with their 2D projections in the camera image.
To get around this issue, the researchers developed a probabilistic framework that uses "mixture models." These models mathematically describe the relationship between the 3D object features and their 2D image projections in a statistical way, without needing to explicitly match up individual features. This allows the system to estimate the 3D pose of the object more robustly, without getting tripped up by the correspondence problem.
The key idea is to model the 3D-to-2D projection process in a stochastic (probabilistic) and geometric way, using a mixture of probability distributions. This provides a flexible and principled approach to 3D pose estimation that can handle uncertainty and variability in the imaging process.
Technical Explanation
The paper presents a stochastic-geometrical framework for 3D object pose estimation that avoids the "correspondence problem" by using mixture models to probabilistically describe the relationship between 3D object features and their 2D image projections.
The core of the approach is a generative model that captures the stochastic nature of the 3D-to-2D projection process. This model represents the 3D object as a set of features (e.g. corners, edges) and uses a mixture of probability distributions to describe how these 3D features map to 2D image locations.
By modeling the projection process in this probabilistic, geometric way, the framework can estimate the 3D pose of an object without needing to explicitly match individual 3D features to their 2D counterparts. This sidesteps the correspondence problem that plagues many traditional 3D pose estimation methods.
The paper describes the mathematical formulation of the stochastic-geometrical model, as well as efficient techniques for learning the model parameters and using the model to estimate object pose from images. Experiments on benchmark datasets demonstrate the effectiveness of the proposed approach compared to prior methods.
Critical Analysis
The key strength of this work is its principled probabilistic formulation of the 3D pose estimation problem, which allows it to handle uncertainties and ambiguities in the imaging process more robustly than traditional deterministic approaches. By using mixture models to capture the stochastic 3D-to-2D mapping, the framework avoids the need for explicit feature correspondences, a major source of error in many pose estimation systems.
However, the paper does not extensively discuss the limitations of the proposed approach. For example, the mixture model representations may struggle to scale to highly complex 3D object geometries with a large number of features. Additionally, the reliance on accurate 3D object models may limit the framework's applicability to real-world scenarios where such detailed models are not available.
Further research could investigate ways to relax the requirement for precise 3D object models, perhaps by leveraging learned feature representations or other techniques to make the framework more robust to modeling uncertainties. Extensive evaluations on diverse, challenging datasets would also help assess the practical benefits and drawbacks of this stochastic-geometrical approach to 3D pose estimation.
Conclusion
This paper presents a novel stochastic-geometrical framework for 3D object pose estimation that sidesteps the correspondence problem by using mixture models to probabilistically describe the 3D-to-2D projection process. The principled probabilistic formulation allows the approach to handle uncertainties in the imaging pipeline more robustly than traditional deterministic methods.
While the paper demonstrates promising results, further research is needed to address potential limitations, such as scaling to complex 3D object geometries and reducing reliance on detailed 3D models. Nonetheless, this work represents an important step towards more flexible and reliable 3D pose estimation systems, with applications in areas like robotic manipulation, augmented reality, and autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Stochastic-Geometrical Framework for Object Pose Estimation based on Mixture Models Avoiding the Correspondence Problem
Wolfgang Hoegele
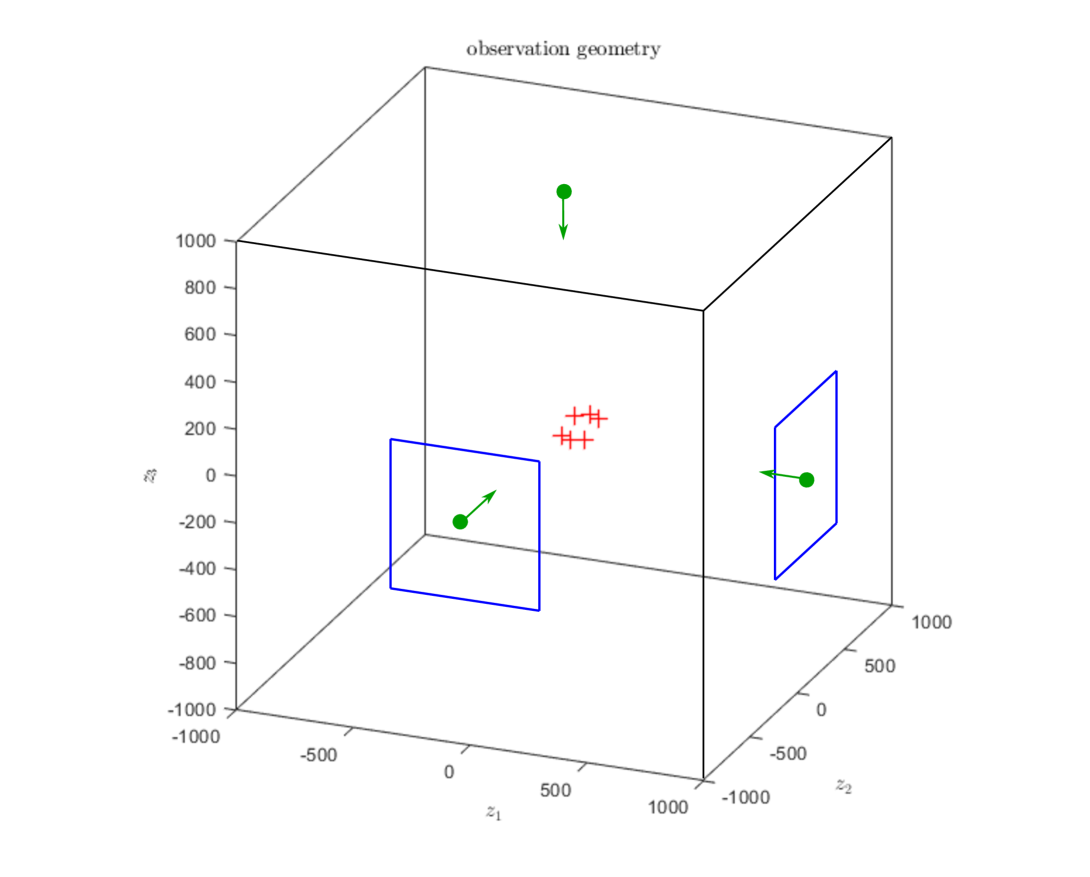
Background: Pose estimation of rigid objects is a practical challenge in optical metrology and computer vision. This paper presents a novel stochastic-geometrical modeling framework for object pose estimation based on observing multiple feature points. Methods: This framework utilizes mixture models for feature point densities in object space and for interpreting real measurements. Advantages are the avoidance to resolve individual feature correspondences and to incorporate correct stochastic dependencies in multi-view applications. First, the general modeling framework is presented, second, a general algorithm for pose estimation is derived, and third, two example models (camera and lateration setup) are presented. Results: Numerical experiments show the effectiveness of this modeling and general algorithm by presenting four simulation scenarios for three observation systems, including the dependence on measurement resolution, object deformations and measurement noise. Probabilistic modeling utilizing mixture models shows the potential for accurate and robust pose estimations while avoiding the correspondence problem.
Read more6/4/2024

0
Object Gaussian for Monocular 6D Pose Estimation from Sparse Views
Luqing Luo, Shichu Sun, Jiangang Yang, Linfang Zheng, Jinwei Du, Jian Liu
Monocular object pose estimation, as a pivotal task in computer vision and robotics, heavily depends on accurate 2D-3D correspondences, which often demand costly CAD models that may not be readily available. Object 3D reconstruction methods offer an alternative, among which recent advancements in 3D Gaussian Splatting (3DGS) afford a compelling potential. Yet its performance still suffers and tends to overfit with fewer input views. Embracing this challenge, we introduce SGPose, a novel framework for sparse view object pose estimation using Gaussian-based methods. Given as few as ten views, SGPose generates a geometric-aware representation by starting with a random cuboid initialization, eschewing reliance on Structure-from-Motion (SfM) pipeline-derived geometry as required by traditional 3DGS methods. SGPose removes the dependence on CAD models by regressing dense 2D-3D correspondences between images and the reconstructed model from sparse input and random initialization, while the geometric-consistent depth supervision and online synthetic view warping are key to the success. Experiments on typical benchmarks, especially on the Occlusion LM-O dataset, demonstrate that SGPose outperforms existing methods even under sparse view constraints, under-scoring its potential in real-world applications.
Read more9/5/2024
🖼️
0
Probabilistic Parameter Estimators and Calibration Metrics for Pose Estimation from Image Features
Romeo Valentin, Sydney M. Katz, Joonghyun Lee, Don Walker, Matthew Sorgenfrei, Mykel J. Kochenderfer
This paper addresses the challenge of probabilistic parameter estimation given measurement uncertainty in real-time. We provide a general formulation and apply this to pose estimation for an autonomous visual landing system. We present three probabilistic parameter estimators: a least-squares sampling approach, a linear approximation method, and a probabilistic programming estimator. To evaluate these estimators, we introduce novel closed-form expressions for measuring calibration and sharpness specifically for multivariate normal distributions. Our experimental study compares the three estimators under various noise conditions. We demonstrate that the linear approximation estimator can produce sharp and well-calibrated pose predictions significantly faster than the other methods but may yield overconfident predictions in certain scenarios. Additionally, we demonstrate that these estimators can be integrated with a Kalman filter for continuous pose estimation during a runway approach where we observe a 50% improvement in sharpness while maintaining marginal calibration. This work contributes to the integration of data-driven computer vision models into complex safety-critical aircraft systems and provides a foundation for developing rigorous certification guidelines for such systems.
Read more7/24/2024

0
Alignist: CAD-Informed Orientation Distribution Estimation by Fusing Shape and Correspondences
Shishir Reddy Vutukur, Rasmus Laurvig Haugaard, Junwen Huang, Benjamin Busam, Tolga Birdal
Object pose distribution estimation is crucial in robotics for better path planning and handling of symmetric objects. Recent distribution estimation approaches employ contrastive learning-based approaches by maximizing the likelihood of a single pose estimate in the absence of a CAD model. We propose a pose distribution estimation method leveraging symmetry respecting correspondence distributions and shape information obtained using a CAD model. Contrastive learning-based approaches require an exhaustive amount of training images from different viewpoints to learn the distribution properly, which is not possible in realistic scenarios. Instead, we propose a pipeline that can leverage correspondence distributions and shape information from the CAD model, which are later used to learn pose distributions. Besides, having access to pose distribution based on correspondences before learning pose distributions conditioned on images, can help formulate the loss between distributions. The prior knowledge of distribution also helps the network to focus on getting sharper modes instead. With the CAD prior, our approach converges much faster and learns distribution better by focusing on learning sharper distribution near all the valid modes, unlike contrastive approaches, which focus on a single mode at a time. We achieve benchmark results on SYMSOL-I and T-Less datasets.
Read more9/12/2024