Design And Flight Testing Of LQRi Attitude Control For Quadcopter UAV

0
🧪
Sign in to get full access
Overview
- This paper presents the design, implementation, and flight test results of a linear quadratic integral regulator (LQRi) based attitude control system for a quadcopter UAV.
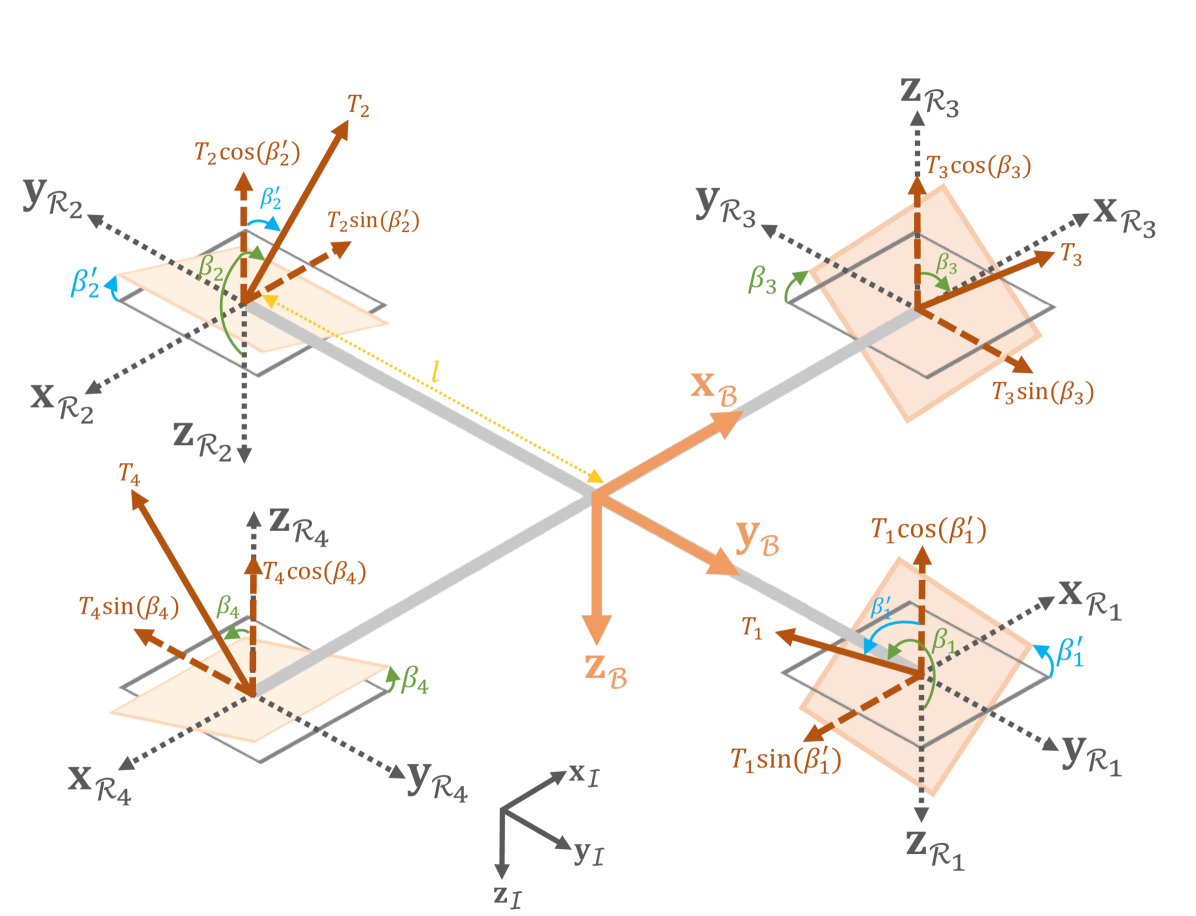
- The researchers derived a mathematical model for the kinematics and dynamics of the UAV, and developed a linearized state space representation of the system around hover conditions.
- LQR and LQRi controllers were designed to stabilize the UAV in hover and track desired attitude commands.
- The controllers were implemented on a Pixhawk flight controller, and the flight test results are discussed.
- The code has been published open-source for replication and further research.
Plain English Explanation
This research focused on developing an advanced control system for a quadcopter drone. Quadcopters are small, flying vehicles with four propellers that are commonly used for photography, surveying, and other applications.
The key challenge in controlling a quadcopter is maintaining stable flight, especially when transitioning between different maneuvers or responding to disturbances. To address this, the researchers used a technique called linear quadratic integral (LQRi) control. LQRi is a mathematical approach that helps the drone automatically adjust its propeller speeds to stay on a desired flight path, even when faced with external forces like wind.
The researchers first developed a detailed model of the quadcopter's physical behavior, describing how the drone moves and rotates in the air. They then used this model to design the LQRi control system, which was implemented on the drone's onboard computer.
The researchers tested their control system by flying the quadcopter and measuring how well it could hover in place and respond to commands to change its orientation. The results showed that the LQRi controller was effective at stabilizing the drone and allowing it to accurately track desired flight paths.
By publishing their code, the researchers have made their work openly available, enabling other researchers to build upon their findings and potentially apply the techniques to different drone platforms.
Technical Explanation
The researchers derived a mathematical model for the kinematics and dynamics of the quadcopter UAV, representing the system's behavior using a linearized state space formulation. This allowed them to design LQR and LQRi controllers to stabilize the UAV in hover and track desired attitude commands.
The LQR controller uses a feedback loop to adjust the drone's propeller speeds based on its current state (position, velocity, etc.) and a desired target state. The LQRi controller adds an additional integral term, which helps eliminate steady-state errors and improve tracking performance.
The researchers implemented the controllers on a Pixhawk flight controller and conducted flight tests to evaluate their performance. The results showed that the LQRi controller was able to successfully stabilize the quadcopter and track attitude commands with high accuracy.
Critical Analysis
The paper provides a thorough technical description of the control system design and implementation, including the derivation of the mathematical model and the controller formulation. However, it does not delve deeply into the specific challenges or limitations encountered during the research.
For example, the authors do not discuss how the control system might perform under more complex or dynamic flight conditions, such as high winds or aggressive maneuvers. Additionally, the paper does not address potential issues with sensor noise, model uncertainty, or other real-world factors that could impact the controller's performance.
Further research could explore the robustness and adaptability of the LQRi control approach in the face of such disturbances and uncertainties. Comparing the performance of the LQRi controller to other advanced techniques, such as model predictive control or machine learning-based approaches, could also provide valuable insights.
Conclusion
This paper presents a comprehensive study on the design, implementation, and flight testing of an LQRi-based attitude control system for a quadcopter UAV. The researchers developed a detailed mathematical model of the system and used it to design stabilizing and tracking controllers, which were then successfully tested on a real quadcopter platform.
By publishing their open-source code, the researchers have made their work accessible to the wider research community, enabling further exploration and potential application of the techniques to other drone platforms. The findings of this study contribute to the ongoing efforts to enhance the autonomy and reliability of small UAVs, which have important applications in areas like aerial photography, infrastructure inspection, and emergency response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Design And Flight Testing Of LQRi Attitude Control For Quadcopter UAV
Astik Srivastava, S. Indu, Richa Sharma
This paper presents the design, implementation, and flight test results of linear quadratic integral regulator (LQRi) based attitude control for a quadcopter UAV. We present the derivation of the mathematical model for the kinematics and dynamics of the UAV, along with the linearized state space representation of the system about hover conditions. LQR and LQRi controllers are then designed to stabilize the UAV in hover conditions and to track desired attitude commands. The controllers are then implemented onboard the Pixhawk flight controller and flight test results are discussed. Finally, the code related to this paper has been published open-source for replication and further research
Read more4/19/2024

0
Modeling and LQR Control of Insect Sized Flapping Wing Robot
Daksh Dhingra, Kadierdan Kaheman, Sawyer B. Fuller
Flying insects can perform rapid, sophisticated maneuvers like backflips, sharp banked turns, and in-flight collision recovery. To emulate these in aerial robots weighing less than a gram, known as flying insect robots (FIRs), a fast and responsive control system is essential. To date, these have largely been, at their core, elaborations of proportional-integral-derivative (PID)-type feedback control. Without exception, their gains have been painstakingly tuned by hand. Aggressive maneuvers have further required task-specific tuning. Optimal control has the potential to mitigate these issues, but has to date only been demonstrated using approxiate models and receding horizon controllers (RHC) that are too computationally demanding to be carried out onboard the robot. Here we used a more accurate stroke-averaged model of forces and torques to implement the first demonstration of optimal control on an FIR that is computationally efficient enough to be performed by a microprocessor carried onboard. We took force and torque measurements from a 150 mg FIR, the UW Robofly, using a custom-built sensitive force-torque sensor, and validated them using motion capture data in free flight. We demonstrated stable hovering (RMS error of about 4 cm) and trajectory tracking maneuvers at translational velocities up to 25 cm/s using an optimal linear quadratic regulator (LQR). These results were enabled by a more accurate model and lay the foundation for future work that uses our improved model and optimal controller in conjunction with recent advances in low-power receding horizon control to perform accurate aggressive maneuvers without iterative, task-specific tuning.
Read more7/1/2024
0
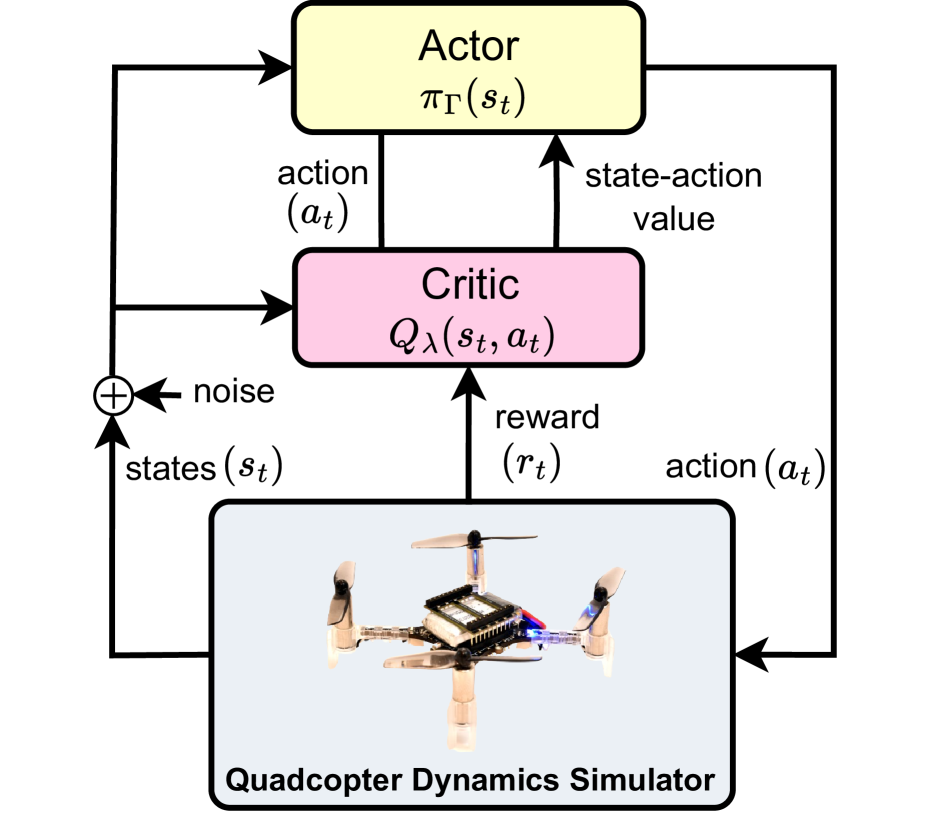
Deep Reinforcement Learning-based Quadcopter Controller: A Practical Approach and Experiments
Truong-Dong Do, Nguyen Xuan Mung, Sung Kyung Hong
Quadcopters have been studied for decades thanks to their maneuverability and capability of operating in a variety of circumstances. However, quadcopters suffer from dynamical nonlinearity, actuator saturation, as well as sensor noise that make it challenging and time consuming to obtain accurate dynamic models and achieve satisfactory control performance. Fortunately, deep reinforcement learning came and has shown significant potential in system modelling and control of autonomous multirotor aerial vehicles, with recent advancements in deployment, performance enhancement, and generalization. In this paper, an end-to-end deep reinforcement learning-based controller for quadcopters is proposed that is secure for real-world implementation, data-efficient, and free of human gain adjustments. First, a novel actor-critic-based architecture is designed to map the robot states directly to the motor outputs. Then, a quadcopter dynamics-based simulator was devised to facilitate the training of the controller policy. Finally, the trained policy is deployed on a real Crazyflie nano quadrotor platform, without any additional fine-tuning process. Experimental results show that the quadcopter exhibits satisfactory performance as it tracks a given complicated trajectory, which demonstrates the effectiveness and feasibility of the proposed method and signifies its capability in filling the simulation-to-reality gap.
Read more6/19/2024
0
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Read more6/26/2024