Diffusion-based Reinforcement Learning via Q-weighted Variational Policy Optimization
2405.16173
0
0

Abstract
Diffusion models have garnered widespread attention in Reinforcement Learning (RL) for their powerful expressiveness and multimodality. It has been verified that utilizing diffusion policies can significantly improve the performance of RL algorithms in continuous control tasks by overcoming the limitations of unimodal policies, such as Gaussian policies, and providing the agent with enhanced exploration capabilities. However, existing works mainly focus on the application of diffusion policies in offline RL, while their incorporation into online RL is less investigated. The training objective of the diffusion model, known as the variational lower bound, cannot be optimized directly in online RL due to the unavailability of 'good' actions. This leads to difficulties in conducting diffusion policy improvement. To overcome this, we propose a novel model-free diffusion-based online RL algorithm, Q-weighted Variational Policy Optimization (QVPO). Specifically, we introduce the Q-weighted variational loss, which can be proved to be a tight lower bound of the policy objective in online RL under certain conditions. To fulfill these conditions, the Q-weight transformation functions are introduced for general scenarios. Additionally, to further enhance the exploration capability of the diffusion policy, we design a special entropy regularization term. We also develop an efficient behavior policy to enhance sample efficiency by reducing the variance of the diffusion policy during online interactions. Consequently, the QVPO algorithm leverages the exploration capabilities and multimodality of diffusion policies, preventing the RL agent from converging to a sub-optimal policy. To verify the effectiveness of QVPO, we conduct comprehensive experiments on MuJoCo benchmarks. The final results demonstrate that QVPO achieves state-of-the-art performance on both cumulative reward and sample efficiency.
Create account to get full access
Overview
- This paper presents a new reinforcement learning (RL) algorithm called Diffusion-based Reinforcement Learning via Q-weighted Variational Policy Optimization (DQVPO).
- The algorithm combines the strengths of diffusion models and variational policy optimization to tackle challenging RL problems.
- The key ideas include using a diffusion model to generate diverse state-action trajectories and a novel Q-weighted variational objective for policy optimization.
Plain English Explanation
The paper introduces a new way to solve reinforcement learning problems, which are tasks where an agent has to learn how to take actions in an environment to maximize some reward. The core idea is to use a diffusion model, which is a type of machine learning model that can generate diverse data samples, to explore the possible states and actions the agent can take. This helps the agent discover more rewarding behavior compared to traditional exploration methods.
The paper also introduces a Q-weighted variational objective for optimizing the agent's policy, which means the way the agent decides what actions to take. This objective combines information about the expected future rewards (the Q-function) with a variational approach to policy optimization. This helps the agent learn a more effective policy than standard methods.
The authors show that this DQVPO algorithm outperforms existing RL algorithms on a range of challenging benchmark tasks, demonstrating the potential of this approach to tackle complex real-world problems.
Technical Explanation
The DQVPO algorithm works by first training a diffusion model to generate diverse state-action trajectories. This diffusion model is then used to explore the environment and generate candidate trajectories during the RL training process.
For policy optimization, the authors introduce a novel Q-weighted variational objective. This objective combines the expected future rewards (the Q-function) with a variational approach to policy optimization. Specifically, the policy is trained to maximize the expected discounted return, while also minimizing the Kullback-Leibler (KL) divergence between the policy and a variational distribution. This Q-weighted variational objective helps the agent learn a more effective policy than standard methods.
The paper also investigates the connection between the DQVPO algorithm and jump diffusion processes, which are a type of stochastic process that can model abrupt changes in the environment. The authors show that DQVPO can be interpreted as performing pessimistic policy optimization in a jump diffusion setting, which helps the agent learn more robust policies.
Critical Analysis
The DQVPO algorithm represents an interesting and promising approach to reinforcement learning, but there are a few potential limitations and areas for further research:
- The paper focuses on theoretical analysis and benchmark tasks, but more work is needed to demonstrate the effectiveness of DQVPO on complex, real-world RL problems.
- The reliance on a pre-trained diffusion model may limit the scalability of the approach, as training such models can be computationally expensive.
- The paper does not address potential issues with the stability and convergence of the Q-weighted variational objective, which could be an area for further investigation.
Despite these caveats, the core ideas behind DQVPO, such as the use of diffusion models for exploration and the Q-weighted variational objective, are innovative and worth further exploration. As the field of reinforcement learning continues to evolve, approaches like DQVPO that combine diverse exploration with principled policy optimization may help unlock new breakthroughs in tackling complex decision-making problems.
Conclusion
The Diffusion-based Reinforcement Learning via Q-weighted Variational Policy Optimization (DQVPO) algorithm presented in this paper represents a novel and promising approach to reinforcement learning. By leveraging the strengths of diffusion models and a novel Q-weighted variational objective, the DQVPO algorithm demonstrates improved performance on challenging benchmark tasks compared to existing RL methods.
The key innovations of this work, including the use of diffusion models for exploration and the Q-weighted variational objective for policy optimization, have the potential to unlock new breakthroughs in reinforcement learning and help tackle complex real-world decision-making problems. While the paper highlights some areas for further research, the core ideas behind DQVPO are a significant step forward in the field of reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Preferred-Action-Optimized Diffusion Policies for Offline Reinforcement Learning
Tianle Zhang, Jiayi Guan, Lin Zhao, Yihang Li, Dongjiang Li, Zecui Zeng, Lei Sun, Yue Chen, Xuelong Wei, Lusong Li, Xiaodong He
0
0
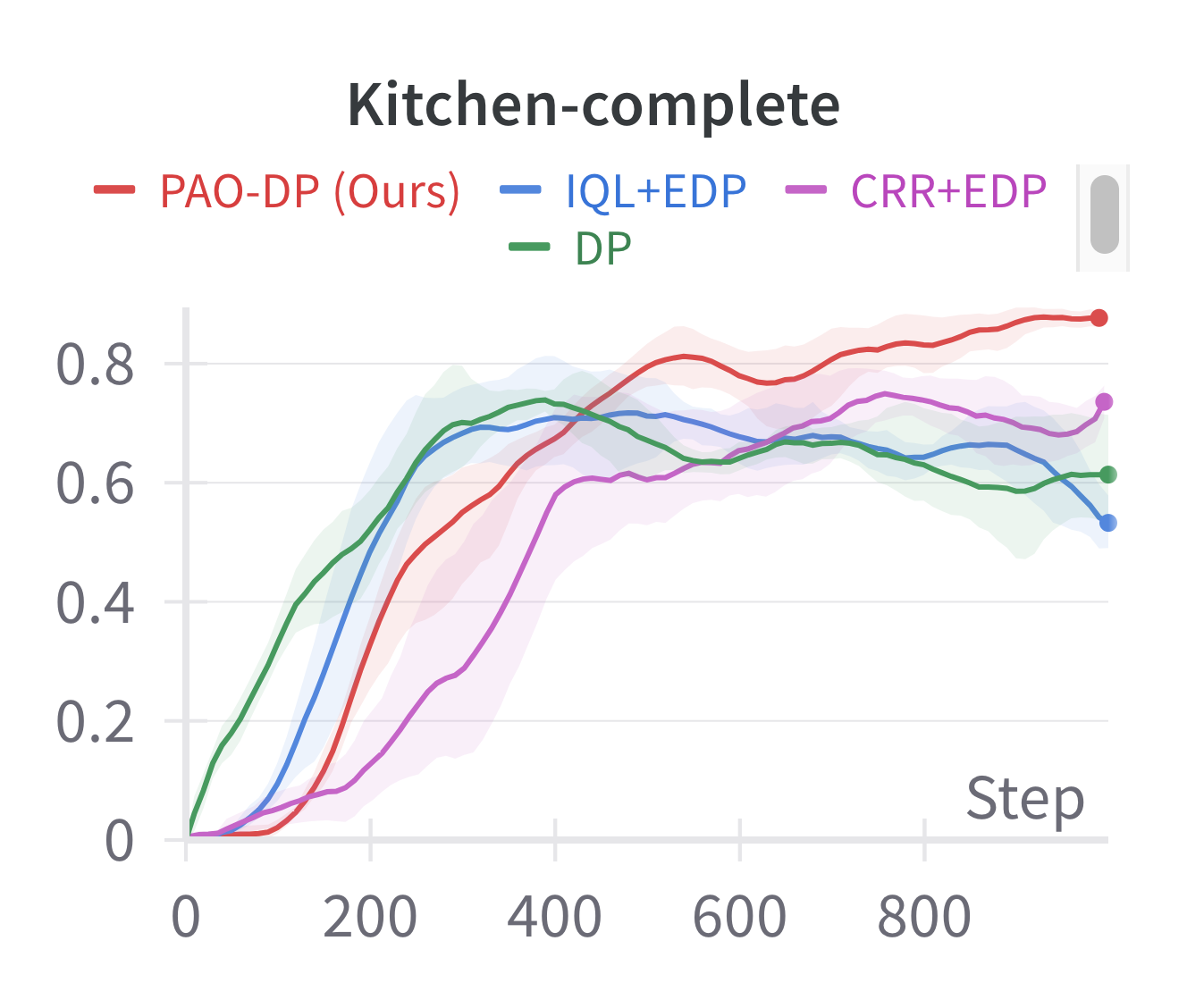
Offline reinforcement learning (RL) aims to learn optimal policies from previously collected datasets. Recently, due to their powerful representational capabilities, diffusion models have shown significant potential as policy models for offline RL issues. However, previous offline RL algorithms based on diffusion policies generally adopt weighted regression to improve the policy. This approach optimizes the policy only using the collected actions and is sensitive to Q-values, which limits the potential for further performance enhancement. To this end, we propose a novel preferred-action-optimized diffusion policy for offline RL. In particular, an expressive conditional diffusion model is utilized to represent the diverse distribution of a behavior policy. Meanwhile, based on the diffusion model, preferred actions within the same behavior distribution are automatically generated through the critic function. Moreover, an anti-noise preference optimization is designed to achieve policy improvement by using the preferred actions, which can adapt to noise-preferred actions for stable training. Extensive experiments demonstrate that the proposed method provides competitive or superior performance compared to previous state-of-the-art offline RL methods, particularly in sparse reward tasks such as Kitchen and AntMaze. Additionally, we empirically prove the effectiveness of anti-noise preference optimization.
5/30/2024

Variational Distillation of Diffusion Policies into Mixture of Experts
Hongyi Zhou, Denis Blessing, Ge Li, Onur Celik, Xiaogang Jia, Gerhard Neumann, Rudolf Lioutikov
0
0
This work introduces Variational Diffusion Distillation (VDD), a novel method that distills denoising diffusion policies into Mixtures of Experts (MoE) through variational inference. Diffusion Models are the current state-of-the-art in generative modeling due to their exceptional ability to accurately learn and represent complex, multi-modal distributions. This ability allows Diffusion Models to replicate the inherent diversity in human behavior, making them the preferred models in behavior learning such as Learning from Human Demonstrations (LfD). However, diffusion models come with some drawbacks, including the intractability of likelihoods and long inference times due to their iterative sampling process. The inference times, in particular, pose a significant challenge to real-time applications such as robot control. In contrast, MoEs effectively address the aforementioned issues while retaining the ability to represent complex distributions but are notoriously difficult to train. VDD is the first method that distills pre-trained diffusion models into MoE models, and hence, combines the expressiveness of Diffusion Models with the benefits of Mixture Models. Specifically, VDD leverages a decompositional upper bound of the variational objective that allows the training of each expert separately, resulting in a robust optimization scheme for MoEs. VDD demonstrates across nine complex behavior learning tasks, that it is able to: i) accurately distill complex distributions learned by the diffusion model, ii) outperform existing state-of-the-art distillation methods, and iii) surpass conventional methods for training MoE.
6/19/2024

Diffusion Policies creating a Trust Region for Offline Reinforcement Learning
Tianyu Chen, Zhendong Wang, Mingyuan Zhou
0
0
Offline reinforcement learning (RL) leverages pre-collected datasets to train optimal policies. Diffusion Q-Learning (DQL), introducing diffusion models as a powerful and expressive policy class, significantly boosts the performance of offline RL. However, its reliance on iterative denoising sampling to generate actions slows down both training and inference. While several recent attempts have tried to accelerate diffusion-QL, the improvement in training and/or inference speed often results in degraded performance. In this paper, we introduce a dual policy approach, Diffusion Trusted Q-Learning (DTQL), which comprises a diffusion policy for pure behavior cloning and a practical one-step policy. We bridge the two polices by a newly introduced diffusion trust region loss. The diffusion policy maintains expressiveness, while the trust region loss directs the one-step policy to explore freely and seek modes within the region defined by the diffusion policy. DTQL eliminates the need for iterative denoising sampling during both training and inference, making it remarkably computationally efficient. We evaluate its effectiveness and algorithmic characteristics against popular Kullback-Leibler (KL) based distillation methods in 2D bandit scenarios and gym tasks. We then show that DTQL could not only outperform other methods on the majority of the D4RL benchmark tasks but also demonstrate efficiency in training and inference speeds. The PyTorch implementation is available at https://github.com/TianyuCodings/Diffusion_Trusted_Q_Learning.
6/4/2024

Learning Multimodal Behaviors from Scratch with Diffusion Policy Gradient
Zechu Li, Rickmer Krohn, Tao Chen, Anurag Ajay, Pulkit Agrawal, Georgia Chalvatzaki
0
0
Deep reinforcement learning (RL) algorithms typically parameterize the policy as a deep network that outputs either a deterministic action or a stochastic one modeled as a Gaussian distribution, hence restricting learning to a single behavioral mode. Meanwhile, diffusion models emerged as a powerful framework for multimodal learning. However, the use of diffusion policies in online RL is hindered by the intractability of policy likelihood approximation, as well as the greedy objective of RL methods that can easily skew the policy to a single mode. This paper presents Deep Diffusion Policy Gradient (DDiffPG), a novel actor-critic algorithm that learns from scratch multimodal policies parameterized as diffusion models while discovering and maintaining versatile behaviors. DDiffPG explores and discovers multiple modes through off-the-shelf unsupervised clustering combined with novelty-based intrinsic motivation. DDiffPG forms a multimodal training batch and utilizes mode-specific Q-learning to mitigate the inherent greediness of the RL objective, ensuring the improvement of the diffusion policy across all modes. Our approach further allows the policy to be conditioned on mode-specific embeddings to explicitly control the learned modes. Empirical studies validate DDiffPG's capability to master multimodal behaviors in complex, high-dimensional continuous control tasks with sparse rewards, also showcasing proof-of-concept dynamic online replanning when navigating mazes with unseen obstacles.
6/4/2024