Digital twins to alleviate the need for real field data in vision-based vehicle speed detection systems

0

Sign in to get full access
Overview
- This paper explores the use of digital twins, or simulated environments, to alleviate the need for real-world data in vision-based vehicle speed detection systems.
- The researchers develop a digital twin framework that can accurately model vehicle dynamics and camera sensor characteristics, allowing them to generate synthetic training data for computer vision models.
- By leveraging this synthetic data, the researchers demonstrate that vision-based speed detection systems can be trained without the need for costly and time-consuming real-world data collection.
Plain English Explanation
The paper discusses a way to train computer vision models for detecting vehicle speeds using simulated, or "digital twin", environments instead of real-world data. Exploring generative AI for sim2real driving data synthesis and Low-fidelity digital twin for automated driving systems are related works that also explore the use of digital twins in driving applications.
The key idea is to create a virtual model of the real-world environment, including factors like vehicle dynamics and camera sensor characteristics. This digital twin can then be used to generate realistic synthetic data for training computer vision models to detect vehicle speeds. This approach can save a lot of time and money compared to collecting and labeling real-world data.
The paper demonstrates that by using this synthetic data, the vision-based speed detection models can achieve similar accuracy to those trained on real-world data. This suggests that digital twins can be a powerful tool for developing computer vision systems without the need for extensive real-world data collection and labeling, which is a common challenge in synthetic data generation for bridging the sim2real gap in production and RadSimReal: Bridging the gap between synthetic and real data.
Technical Explanation
The researchers develop a digital twin framework that combines a physics-based vehicle dynamics model with a high-fidelity camera sensor simulation. This allows them to generate synthetic video data of vehicles moving through a virtual environment, complete with accurate vehicle speeds and camera sensor characteristics.
They then use this synthetic data to train a computer vision model for detecting vehicle speeds. The model architecture consists of a convolutional neural network that takes in video frames and outputs the estimated vehicle speed.
Through experiments, the researchers demonstrate that the vision-based speed detection model trained on the synthetic data can achieve similar accuracy to a model trained on real-world data. This suggests that the digital twin framework is effective at capturing the relevant real-world phenomena required for this computer vision task.
Critical Analysis
The paper provides a promising approach for alleviating the need for real-world data in vision-based vehicle speed detection systems. By leveraging digital twins, the researchers are able to generate high-quality synthetic training data that can substitute for costly real-world data collection and labeling.
However, the paper does not address the potential challenge of reducing data acquisition and labeling for defect detection in the real-world deployment of such systems. Factors like weather conditions, lighting, and infrastructure differences between the simulated and real environments could still pose challenges for generalizing the vision models.
Additionally, the paper focuses solely on vehicle speed detection, and it remains to be seen how well this digital twin approach would extend to other computer vision tasks in autonomous driving or related domains. Further research is needed to understand the broader applicability and limitations of this technique.
Conclusion
This paper presents a novel approach to training vision-based vehicle speed detection systems using synthetic data generated from a digital twin framework. By accurately modeling vehicle dynamics and camera sensor characteristics in simulation, the researchers demonstrate that high-quality training data can be created without the need for extensive real-world data collection.
The results show that vision models trained on this synthetic data can achieve similar accuracy to those trained on real-world data, suggesting that digital twins can be a powerful tool for developing computer vision systems in a more efficient and cost-effective manner. This research has the potential to greatly reduce the barriers to deploying vision-based technologies in various applications, from autonomous vehicles to traffic monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Digital twins to alleviate the need for real field data in vision-based vehicle speed detection systems
Antonio Hern'andez Mart'inez, Iv'an Garc'ia Daza, Carlos Fern'andez L'opez, David Fern'andez Llorca
Accurate vision-based speed estimation is much more cost-effective than traditional methods based on radar or LiDAR. However, it is also challenging due to the limitations of perspective projection on a discrete sensor, as well as the high sensitivity to calibration, lighting and weather conditions. Interestingly, deep learning approaches (which dominate the field of computer vision) are very limited in this context due to the lack of available data. Indeed, obtaining video sequences of real road traffic with accurate speed values associated with each vehicle is very complex and costly, and the number of available datasets is very limited. Recently, some approaches are focusing on the use of synthetic data. However, it is still unclear how models trained on synthetic data can be effectively applied to real world conditions. In this work, we propose the use of digital-twins using CARLA simulator to generate a large dataset representative of a specific real-world camera. The synthetic dataset contains a large variability of vehicle types, colours, speeds, lighting and weather conditions. A 3D CNN model is trained on the digital twin and tested on the real sequences. Unlike previous approaches that generate multi-camera sequences, we found that the gap between the the real and the virtual conditions is a key factor in obtaining low speed estimation errors. Even with a preliminary approach, the mean absolute error obtained remains below 3km/h.
Read more7/12/2024
0
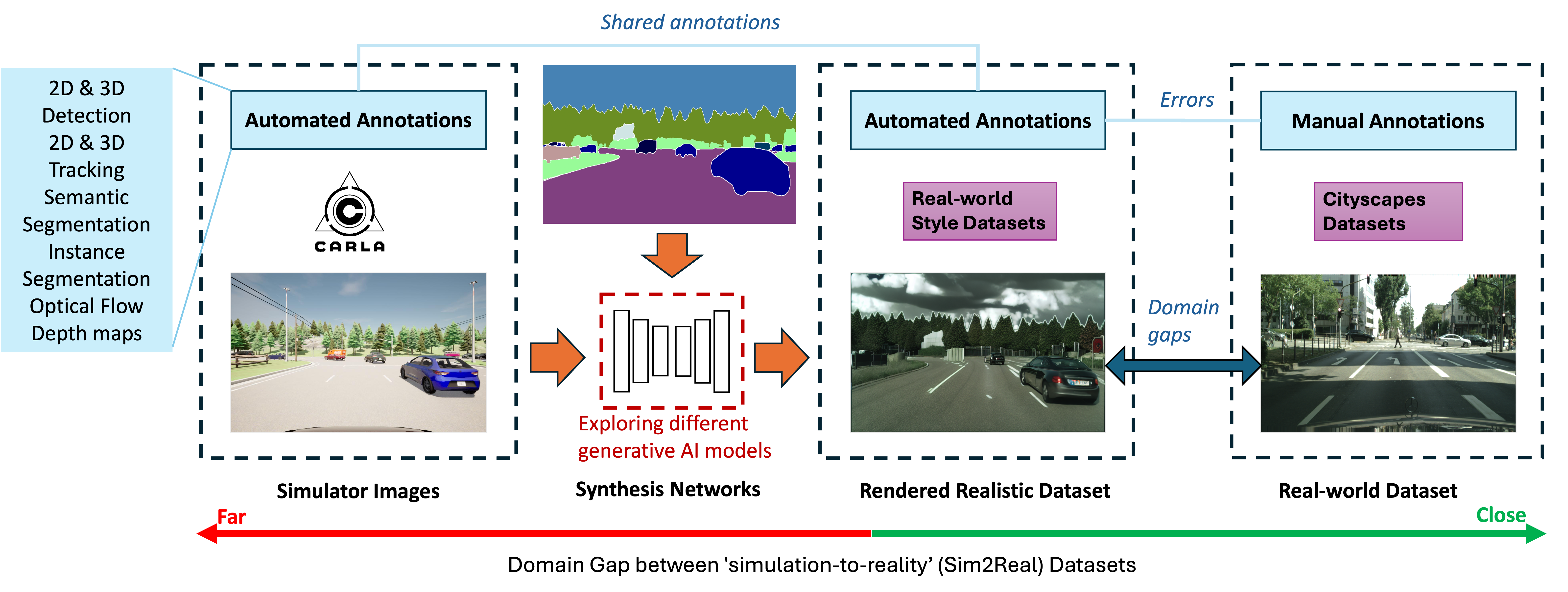
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Haonan Zhao, Yiting Wang, Thomas Bashford-Rogers, Valentina Donzella, Kurt Debattista
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
Read more4/16/2024
🛸
0
Low Fidelity Digital Twin for Automated Driving Systems: Use Cases and Automatic Generation
Jiri Vlasak, Jaroslav Klap'alek, Adam Kollarv{c}'ik, Michal Sojka, Zdenv{e}k Hanz'alek
Automated driving systems are an integral part of the automotive industry. Tools such as Robot Operating System and simulators support their development. However, in the end, the developers must test their algorithms on a real vehicle. To better observe the difference between reality and simulation--the reality gap--digital twin technology offers real-time communication between the real vehicle and its model. We present low fidelity digital twin generator and describe situations where automatic generation is preferable to high fidelity simulation. We validated our approach of generating a virtual environment with a vehicle model by replaying the data recorded from the real vehicle.
Read more8/12/2024
0
Digital Twins and Testbeds for Supporting AI Research with Autonomous Vehicle Networks
An{i}l Gurses, Gautham Reddy, Saad Masrur, Ozgur Ozdemir, .Ismail Guvenc{c}, Mihail L. Sichitiu, Alphan c{S}ahin, Ahmed Alkhateeb, Magreth Mushi, Rudra Dutta
Digital twins (DTs), which are virtual environments that simulate, predict, and optimize the performance of their physical counterparts, hold great promise in revolutionizing next-generation wireless networks. While DTs have been extensively studied for wireless networks, their use in conjunction with autonomous vehicles featuring programmable mobility remains relatively under-explored. In this paper, we study DTs used as a development environment to design, deploy, and test artificial intelligence (AI) techniques that utilize real-world (RW) observations, e.g. radio key performance indicators, for vehicle trajectory and network optimization decisions in autonomous vehicle networks (AVN). We first compare and contrast the use of simulation, digital twin (software in the loop (SITL)), sandbox (hardware-in-the-loop (HITL)), and physical testbed (PT) environments for their suitability in developing and testing AI algorithms for AVNs. We then review various representative use cases of DTs for AVN scenarios. Finally, we provide an example from the NSF AERPAW platform where a DT is used to develop and test AI-aided solutions for autonomous unmanned aerial vehicles for localizing a signal source based solely on link quality measurements. Our results in the physical testbed show that SITL DTs, when supplemented with data from RW measurements and simulations, can serve as an ideal environment for developing and testing innovative AI solutions for AVNs.
Read more8/9/2024