ELEV-VISION-SAM: Integrated Vision Language and Foundation Model for Automated Estimation of Building Lowest Floor Elevation

0

Sign in to get full access
Overview
- Presents a novel integrated vision-language model called ELEV-VISION-SAM for automated estimation of building lowest floor elevation from aerial imagery and textual descriptions
- Addresses the challenge of accurately determining building elevation, which is critical for flood risk assessment and disaster response planning
- Combines computer vision, natural language processing, and large language models to leverage both visual and textual data sources
Plain English Explanation
ELEV-VISION-SAM is a new AI system that can automatically estimate the lowest floor elevation of buildings using aerial photos and text descriptions. Knowing a building's elevation is important for understanding flood risk and planning emergency responses, but this information is often difficult to obtain. This model aims to solve that problem by using advanced computer vision and language understanding techniques to extract the necessary details from available data sources.
The key idea is to integrate visual information from aerial imagery with textual descriptions, which can provide additional context and details that may not be evident from the images alone. By combining these two data modalities, the model can make more accurate and reliable estimates of a building's lowest floor elevation. This could be a valuable tool for urban planners, disaster response teams, and others who need accurate building elevation data but don't have easy access to it.
Technical Explanation
The ELEV-VISION-SAM model consists of a computer vision component that processes aerial imagery to extract relevant visual features, and a natural language processing component that analyzes textual descriptions of the buildings. These two subsystems are then integrated using a large language model that can understand the relationship between the visual and textual data.
The computer vision component uses deep learning techniques to detect and segment individual buildings in the aerial imagery. It then extracts visual features such as the building's size, shape, and surrounding terrain. The natural language processing component analyzes any available textual descriptions of the buildings, such as property records or news articles, to extract additional contextual information.
The integrated large language model then takes the visual and textual features as input and uses its understanding of the relationship between building characteristics and elevation to estimate the lowest floor elevation. This multi-modal approach allows the model to leverage both visual and textual data sources to improve the accuracy of its elevation estimates.
Critical Analysis
The authors acknowledge that ELEV-VISION-SAM's performance is dependent on the availability and quality of the input data, both visual and textual. In areas where building-level information is scarce or unreliable, the model's estimates may be less accurate. The authors also note that the model has not yet been tested on a national or global scale, and its performance may vary in different geographic and cultural contexts.
Additionally, while the model's ability to combine visual and textual data is a strength, it also introduces potential biases and errors if the underlying data sources are biased or inconsistent. The authors suggest further research is needed to understand and mitigate these issues.
Nonetheless, the ELEV-VISION-SAM model represents a significant advance in the field of automated building elevation estimation, with the potential to improve flood risk assessment, disaster planning, and other critical urban planning tasks. Its integration of computer vision, natural language processing, and large language models is an innovative approach that could inspire similar multi-modal techniques in other domains.
Conclusion
The ELEV-VISION-SAM model presents a novel approach to automatically estimating building lowest floor elevation using a combination of aerial imagery and textual descriptions. By integrating computer vision, natural language processing, and large language models, the system can leverage both visual and textual data sources to make more accurate and reliable elevation estimates.
While the model has some limitations in terms of data availability and bias, it represents a significant step forward in the field of building elevation estimation. As urban planning, disaster response, and other critical applications increasingly require accurate elevation data, tools like ELEV-VISION-SAM could become invaluable for efficiently gathering and analyzing this information at scale.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
ELEV-VISION-SAM: Integrated Vision Language and Foundation Model for Automated Estimation of Building Lowest Floor Elevation
Yu-Hsuan Ho, Longxiang Li, Ali Mostafavi
Street view imagery, aided by advancements in image quality and accessibility, has emerged as a valuable resource for urban analytics research. Recent studies have explored its potential for estimating lowest floor elevation (LFE), offering a scalable alternative to traditional on-site measurements, crucial for assessing properties' flood risk and damage extent. While existing methods rely on object detection, the introduction of image segmentation has broadened street view images' utility for LFE estimation, although challenges still remain in segmentation quality and capability to distinguish front doors from other doors. To address these challenges in LFE estimation, this study integrates the Segment Anything model, a segmentation foundation model, with vision language models to conduct text-prompt image segmentation on street view images for LFE estimation. By evaluating various vision language models, integration methods, and text prompts, we identify the most suitable model for street view image analytics and LFE estimation tasks, thereby improving the availability of the current LFE estimation model based on image segmentation from 33% to 56% of properties. Remarkably, our proposed method significantly enhances the availability of LFE estimation to almost all properties in which the front door is visible in the street view image. Also the findings present the first baseline and comparison of various vision models of street view image-based LFE estimation. The model and findings not only contribute to advancing street view image segmentation for urban analytics but also provide a novel approach for image segmentation tasks for other civil engineering and infrastructure analytics tasks.
Read more4/22/2024

0
Towards Zero-Shot Annotation of the Built Environment with Vision-Language Models (Vision Paper)
Bin Han, Yiwei Yang, Anat Caspi, Bill Howe
Equitable urban transportation applications require high-fidelity digital representations of the built environment: not just streets and sidewalks, but bike lanes, marked and unmarked crossings, curb ramps and cuts, obstructions, traffic signals, signage, street markings, potholes, and more. Direct inspections and manual annotations are prohibitively expensive at scale. Conventional machine learning methods require substantial annotated training data for adequate performance. In this paper, we consider vision language models as a mechanism for annotating diverse urban features from satellite images, reducing the dependence on human annotation to produce large training sets. While these models have achieved impressive results in describing common objects in images captured from a human perspective, their training sets are less likely to include strong signals for esoteric features in the built environment, and their performance in these settings is therefore unclear. We demonstrate proof-of-concept combining a state-of-the-art vision language model and variants of a prompting strategy that asks the model to consider segmented elements independently of the original image. Experiments on two urban features -- stop lines and raised tables -- show that while direct zero-shot prompting correctly annotates nearly zero images, the pre-segmentation strategies can annotate images with near 40% intersection-over-union accuracy. We describe how these results inform a new research agenda in automatic annotation of the built environment to improve equity, accessibility, and safety at broad scale and in diverse environments.
Read more8/6/2024

0
Examining the Commitments and Difficulties Inherent in Multimodal Foundation Models for Street View Imagery
Zhenyuan Yang, Xuhui Lin, Qinyi He, Ziye Huang, Zhengliang Liu, Hanqi Jiang, Peng Shu, Zihao Wu, Yiwei Li, Stephen Law, Gengchen Mai, Tianming Liu, Tao Yang
The emergence of Large Language Models (LLMs) and multimodal foundation models (FMs) has generated heightened interest in their applications that integrate vision and language. This paper investigates the capabilities of ChatGPT-4V and Gemini Pro for Street View Imagery, Built Environment, and Interior by evaluating their performance across various tasks. The assessments include street furniture identification, pedestrian and car counts, and road width measurement in Street View Imagery; building function classification, building age analysis, building height analysis, and building structure classification in the Built Environment; and interior room classification, interior design style analysis, interior furniture counts, and interior length measurement in Interior. The results reveal proficiency in length measurement, style analysis, question answering, and basic image understanding, but highlight limitations in detailed recognition and counting tasks. While zero-shot learning shows potential, performance varies depending on the problem domains and image complexities. This study provides new insights into the strengths and weaknesses of multimodal foundation models for practical challenges in Street View Imagery, Built Environment, and Interior. Overall, the findings demonstrate foundational multimodal intelligence, emphasizing the potential of FMs to drive forward interdisciplinary applications at the intersection of computer vision and language.
Read more8/26/2024
0
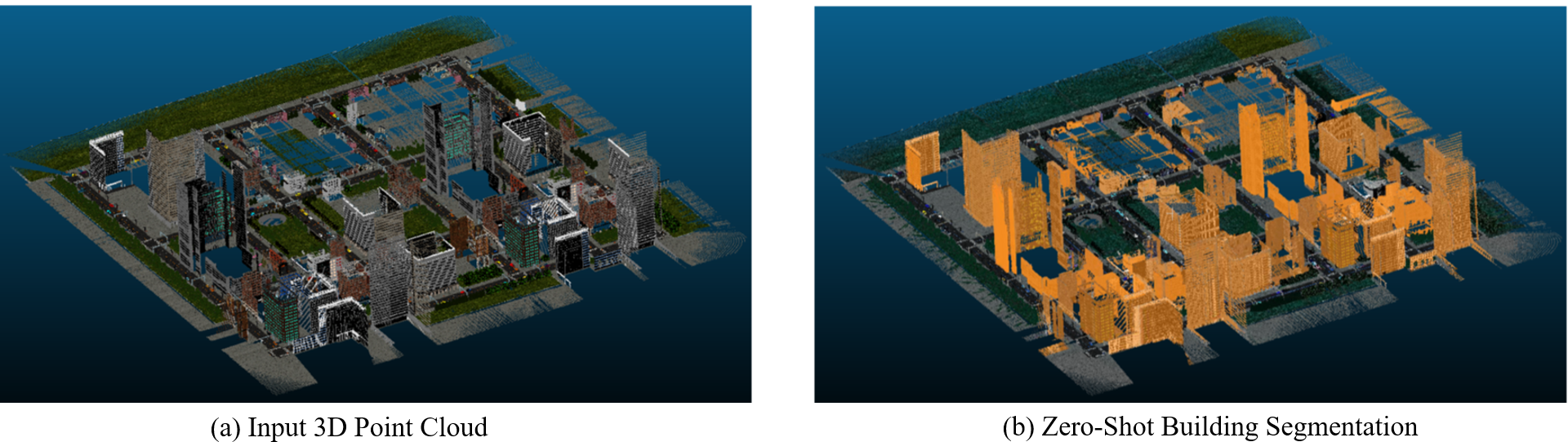
Zero-shot detection of buildings in mobile LiDAR using Language Vision Model
June Moh Goo, Zichao Zeng, Jan Boehm
Recent advances have demonstrated that Language Vision Models (LVMs) surpass the existing State-of-the-Art (SOTA) in two-dimensional (2D) computer vision tasks, motivating attempts to apply LVMs to three-dimensional (3D) data. While LVMs are efficient and effective in addressing various downstream 2D vision tasks without training, they face significant challenges when it comes to point clouds, a representative format for representing 3D data. It is more difficult to extract features from 3D data and there are challenges due to large data sizes and the cost of the collection and labelling, resulting in a notably limited availability of datasets. Moreover, constructing LVMs for point clouds is even more challenging due to the requirements for large amounts of data and training time. To address these issues, our research aims to 1) apply the Grounded SAM through Spherical Projection to transfer 3D to 2D, and 2) experiment with synthetic data to evaluate its effectiveness in bridging the gap between synthetic and real-world data domains. Our approach exhibited high performance with an accuracy of 0.96, an IoU of 0.85, precision of 0.92, recall of 0.91, and an F1 score of 0.92, confirming its potential. However, challenges such as occlusion problems and pixel-level overlaps of multi-label points during spherical image generation remain to be addressed in future studies.
Read more4/16/2024