Towards Zero-Shot Annotation of the Built Environment with Vision-Language Models (Vision Paper)

0

Sign in to get full access
Overview
- Explores using vision-language models for zero-shot annotation of urban environments
- Demonstrates ability to localize and label diverse built environment elements without any training data
- Highlights potential for AI-assisted urban data collection and analysis
Plain English Explanation
This research paper examines how advanced AI models that combine computer vision and language understanding can be used to automatically annotate and label elements of urban environments, without any prior training on that specific data.
The key idea is to leverage large language models and multi-modal AI systems that have been trained on vast amounts of general visual and textual data. These models can then be applied to new images or sensor data, like photos or mobile LiDAR, to automatically identify and label a wide variety of urban elements - buildings, roads, infrastructure, etc. - without any specialized training on that particular city or environment.
The researchers demonstrate the effectiveness of this zero-shot learning approach through various experiments, showing how these AI models can accurately localize and classify diverse built environment components. This highlights the potential for using such AI systems to streamline and scale the process of collecting and annotating urban data, which is critical for applications like urban planning, safety assessments, and semantic segmentation.
Technical Explanation
The paper proposes a novel approach for zero-shot annotation of urban environments using vision-language models. The key idea is to leverage large-scale, pre-trained vision-language models that have been trained on diverse visual and textual data, and then apply these models to automatically annotate and label elements of the built environment, without any specialized training.
The researchers experiment with several state-of-the-art vision-language models, including CLIP and Flamingo, and evaluate their performance on a range of urban datasets, including aerial imagery, street-level photos, and mobile LiDAR scans. Through these experiments, they demonstrate the models' ability to accurately localize and classify a wide variety of built environment components, such as buildings, roads, trees, and infrastructure, without any prior exposure to that specific urban environment.
The paper also discusses the implications of this zero-shot learning approach for streamlining urban data collection and analysis. By leveraging pre-trained AI models, the researchers show how the time-consuming and labor-intensive process of manually annotating urban data can be significantly reduced, paving the way for more efficient and scalable urban computing applications.
Critical Analysis
The research presented in this paper is a promising step towards enabling more efficient and automated annotation of urban environments using advanced AI systems. The key strength of the approach is its ability to generalize to new urban scenes without requiring any specialized training data, which could greatly simplify the process of collecting and labeling urban data for a wide range of applications.
However, the paper also acknowledges several limitations and areas for further research. For example, the experiments were conducted on relatively limited datasets, and it's unclear how the models would perform on more diverse or complex urban environments. Additionally, the paper does not delve into the potential biases or errors that these AI systems may introduce, which is an important consideration for real-world urban planning and decision-making applications.
Furthermore, while the zero-shot learning approach is promising, it still relies on having access to large-scale, pre-trained vision-language models, which can be computationally expensive and challenging to deploy in resource-constrained settings. Exploring more efficient or lightweight model architectures could be an important area for future research.
Overall, this paper represents an important contribution to the field of urban computing and AI-assisted urban data analysis. By demonstrating the potential of vision-language models for zero-shot urban annotation, the researchers have opened up new avenues for streamlining the collection and processing of urban data, with potential benefits for a wide range of urban planning, safety, and environmental applications.
Conclusion
This research paper explores the use of advanced vision-language models for the zero-shot annotation of urban environments. By leveraging the capabilities of large-scale, pre-trained AI systems, the researchers have shown how it is possible to accurately identify and label a diverse range of built environment components, without the need for any specialized training data.
The findings of this study highlight the potential for using AI-powered tools to streamline the process of urban data collection and analysis, which is critical for applications such as urban planning, safety assessments, and environmental monitoring. While the paper acknowledges some limitations and areas for further research, it represents an important step forward in the field of urban computing and AI-assisted urban analytics.
As cities continue to grow in complexity and the demand for data-driven decision-making increases, tools like the ones described in this paper may become increasingly valuable for helping to understand and manage the built environment in a more efficient and scalable manner.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Zero-Shot Annotation of the Built Environment with Vision-Language Models (Vision Paper)
Bin Han, Yiwei Yang, Anat Caspi, Bill Howe
Equitable urban transportation applications require high-fidelity digital representations of the built environment: not just streets and sidewalks, but bike lanes, marked and unmarked crossings, curb ramps and cuts, obstructions, traffic signals, signage, street markings, potholes, and more. Direct inspections and manual annotations are prohibitively expensive at scale. Conventional machine learning methods require substantial annotated training data for adequate performance. In this paper, we consider vision language models as a mechanism for annotating diverse urban features from satellite images, reducing the dependence on human annotation to produce large training sets. While these models have achieved impressive results in describing common objects in images captured from a human perspective, their training sets are less likely to include strong signals for esoteric features in the built environment, and their performance in these settings is therefore unclear. We demonstrate proof-of-concept combining a state-of-the-art vision language model and variants of a prompting strategy that asks the model to consider segmented elements independently of the original image. Experiments on two urban features -- stop lines and raised tables -- show that while direct zero-shot prompting correctly annotates nearly zero images, the pre-segmentation strategies can annotate images with near 40% intersection-over-union accuracy. We describe how these results inform a new research agenda in automatic annotation of the built environment to improve equity, accessibility, and safety at broad scale and in diverse environments.
Read more8/6/2024

0
Evaluation and Comparison of Visual Language Models for Transportation Engineering Problems
Sanjita Prajapati, Tanu Singh, Chinmay Hegde, Pranamesh Chakraborty
Recent developments in vision language models (VLM) have shown great potential for diverse applications related to image understanding. In this study, we have explored state-of-the-art VLM models for vision-based transportation engineering tasks such as image classification and object detection. The image classification task involves congestion detection and crack identification, whereas, for object detection, helmet violations were identified. We have applied open-source models such as CLIP, BLIP, OWL-ViT, Llava-Next, and closed-source GPT-4o to evaluate the performance of these state-of-the-art VLM models to harness the capabilities of language understanding for vision-based transportation tasks. These tasks were performed by applying zero-shot prompting to the VLM models, as zero-shot prompting involves performing tasks without any training on those tasks. It eliminates the need for annotated datasets or fine-tuning for specific tasks. Though these models gave comparative results with benchmark Convolutional Neural Networks (CNN) models in the image classification tasks, for object localization tasks, it still needs improvement. Therefore, this study provides a comprehensive evaluation of the state-of-the-art VLM models highlighting the advantages and limitations of the models, which can be taken as the baseline for future improvement and wide-scale implementation.
Read more9/5/2024

0
Pushing the Limits of Vision-Language Models in Remote Sensing without Human Annotations
Keumgang Cha, Donggeun Yu, Junghoon Seo
The prominence of generalized foundation models in vision-language integration has witnessed a surge, given their multifarious applications. Within the natural domain, the procurement of vision-language datasets to construct these foundation models is facilitated by their abundant availability and the ease of web crawling. Conversely, in the remote sensing domain, although vision-language datasets exist, their volume is suboptimal for constructing robust foundation models. This study introduces an approach to curate vision-language datasets by employing an image decoding machine learning model, negating the need for human-annotated labels. Utilizing this methodology, we amassed approximately 9.6 million vision-language paired datasets in VHR imagery. The resultant model outperformed counterparts that did not leverage publicly available vision-language datasets, particularly in downstream tasks such as zero-shot classification, semantic localization, and image-text retrieval. Moreover, in tasks exclusively employing vision encoders, such as linear probing and k-NN classification, our model demonstrated superior efficacy compared to those relying on domain-specific vision-language datasets.
Read more9/12/2024
0
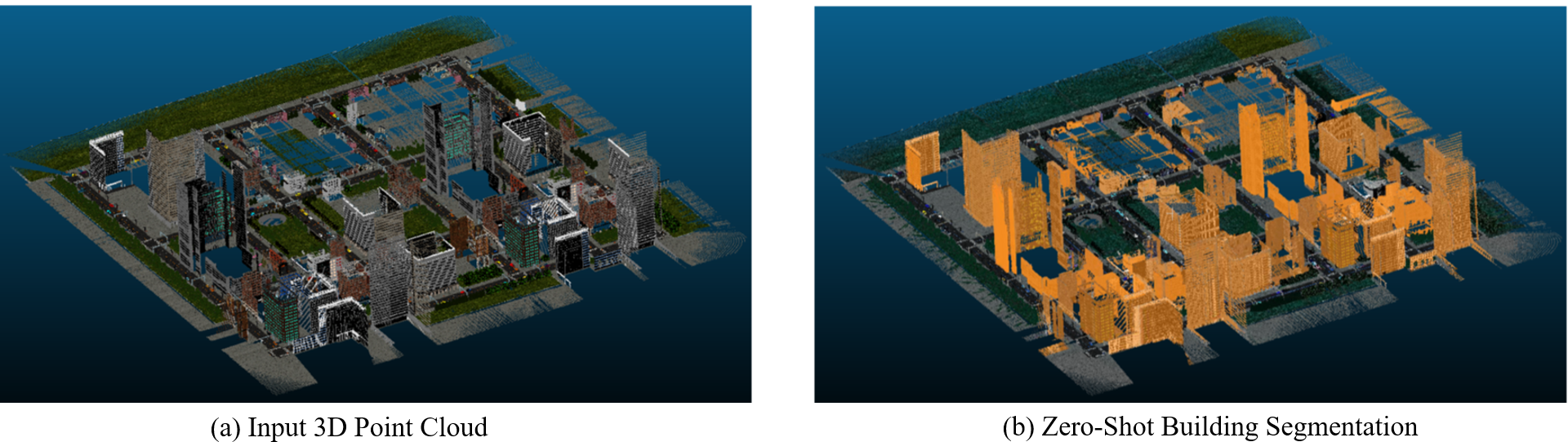
Zero-shot detection of buildings in mobile LiDAR using Language Vision Model
June Moh Goo, Zichao Zeng, Jan Boehm
Recent advances have demonstrated that Language Vision Models (LVMs) surpass the existing State-of-the-Art (SOTA) in two-dimensional (2D) computer vision tasks, motivating attempts to apply LVMs to three-dimensional (3D) data. While LVMs are efficient and effective in addressing various downstream 2D vision tasks without training, they face significant challenges when it comes to point clouds, a representative format for representing 3D data. It is more difficult to extract features from 3D data and there are challenges due to large data sizes and the cost of the collection and labelling, resulting in a notably limited availability of datasets. Moreover, constructing LVMs for point clouds is even more challenging due to the requirements for large amounts of data and training time. To address these issues, our research aims to 1) apply the Grounded SAM through Spherical Projection to transfer 3D to 2D, and 2) experiment with synthetic data to evaluate its effectiveness in bridging the gap between synthetic and real-world data domains. Our approach exhibited high performance with an accuracy of 0.96, an IoU of 0.85, precision of 0.92, recall of 0.91, and an F1 score of 0.92, confirming its potential. However, challenges such as occlusion problems and pixel-level overlaps of multi-label points during spherical image generation remain to be addressed in future studies.
Read more4/16/2024