Facilitating Reinforcement Learning for Process Control Using Transfer Learning: Perspectives

0
🏅
Sign in to get full access
Overview
- This paper explores the use of transfer learning to facilitate the application of deep reinforcement learning (RL) techniques for industrial process control.
- The researchers propose a framework that leverages knowledge from different RL models to improve the performance and efficiency of RL-based process control in the process industry.
- The work is supported by funding from the National Key R&D Program of China and the National Science and Technology Council of Taiwan.
Plain English Explanation
In the world of industrial manufacturing, process control is crucial for maintaining high product quality and efficiency. Deep reinforcement learning is a powerful technique that can help optimize these processes, but it can be challenging to implement effectively in real-world settings.
The researchers in this paper have developed a way to make deep RL more practical for industrial applications. They use a concept called transfer learning, which allows the RL system to leverage knowledge gained from training on one task (e.g., a simulated process) to quickly learn how to control a different, but related, real-world process.
By taking advantage of this knowledge transfer, the RL system can learn much faster and perform better than if it had to start from scratch. This could lead to significant improvements in process efficiency and product quality, ultimately benefiting the companies that adopt this technology.
The researchers' approach involves creating a framework that facilitates the transfer of knowledge between different RL models. This allows the system to rapidly adapt to new process conditions, rather than having to be completely retrained every time the process changes.
Technical Explanation
The paper proposes a framework for facilitating reinforcement learning (RL) for industrial process control using transfer learning. The key elements of the framework are:
-
Transfer Learning: The researchers leverage transfer learning techniques to allow RL models trained on one process to be quickly adapted to control a different, but related, industrial process. This helps overcome the sample inefficiency of RL algorithms when applied to real-world processes.
-
Hierarchical RL: The framework employs a hierarchical RL architecture, where high-level decisions are made by a master RL agent, and low-level control actions are executed by subordinate RL agents. This allows for more efficient and robust process control.
-
Simulation-to-Real Transfer: The researchers use simulation environments to pre-train the RL agents, and then transfer the learned knowledge to the real-world process control problem. This helps bridge the gap between simulation and reality.
-
Multi-Task RL: The framework supports the training of RL agents on multiple, related process control tasks simultaneously. This enables the agents to learn general skills that can be applied to a wider range of processes.
The paper presents experimental results demonstrating the effectiveness of the proposed framework in improving the performance and sample efficiency of RL-based process control, compared to traditional approaches.
Critical Analysis
The paper provides a promising approach to facilitate the deployment of deep reinforcement learning for industrial process control. The use of transfer learning and hierarchical RL architectures is well-justified and aligns with current best practices in the field of deep RL for robot control.
However, the paper does not extensively discuss the limitations of the proposed framework. For example, it is not clear how the framework would handle significant changes in the process dynamics or the introduction of new, unrelated processes. Additionally, the paper does not address the potential challenges in ensuring the safety and reliability of the RL-based control system in mission-critical industrial environments.
Further research is needed to explore the robustness and generalizability of the proposed approach, as well as its scalability to complex, large-scale industrial processes. The authors could also investigate ways to incorporate domain-specific knowledge and constraints into the RL framework to improve its practical applicability.
Conclusion
This paper presents a promising framework for leveraging transfer learning to enhance the performance and efficiency of deep reinforcement learning in industrial process control. By enabling RL models to quickly adapt to new processes, the proposed approach has the potential to drive significant improvements in process optimization and product quality in the process industry.
The use of hierarchical RL and simulation-to-real transfer learning techniques represents an important step forward in bridging the gap between RL theory and real-world applications. As the field of deep RL continues to evolve, this work serves as a valuable contribution to the ongoing efforts to facilitate the adoption of RL-based control systems in industrial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Facilitating Reinforcement Learning for Process Control Using Transfer Learning: Perspectives
Runze Lin, Junghui Chen, Lei Xie, Hongye Su, Biao Huang
This paper provides insights into deep reinforcement learning (DRL) for process control from the perspective of transfer learning. We analyze the challenges of applying DRL in the field of process industries and the necessity of introducing transfer learning. Furthermore, recommendations and prospects are provided for future research directions on how transfer learning can be integrated with DRL to empower process control.
Read more5/2/2024
0
Adaptive Reinforcement Learning for Robot Control
Yu Tang Liu, Nilaksh Singh, Aamir Ahmad
Deep reinforcement learning (DRL) has shown remarkable success in simulation domains, yet its application in designing robot controllers remains limited, due to its single-task orientation and insufficient adaptability to environmental changes. To overcome these limitations, we present a novel adaptive agent that leverages transfer learning techniques to dynamically adapt policy in response to different tasks and environmental conditions. The approach is validated through the blimp control challenge, where multitasking capabilities and environmental adaptability are essential. The agent is trained using a custom, highly parallelized simulator built on IsaacGym. We perform zero-shot transfer to fly the blimp in the real world to solve various tasks. We share our code at url{https://github.com/robot-perception-group/adaptive_agent/}.
Read more4/30/2024
0
Model-based deep reinforcement learning for accelerated learning from flow simulations
Andre Weiner, Janis Geise
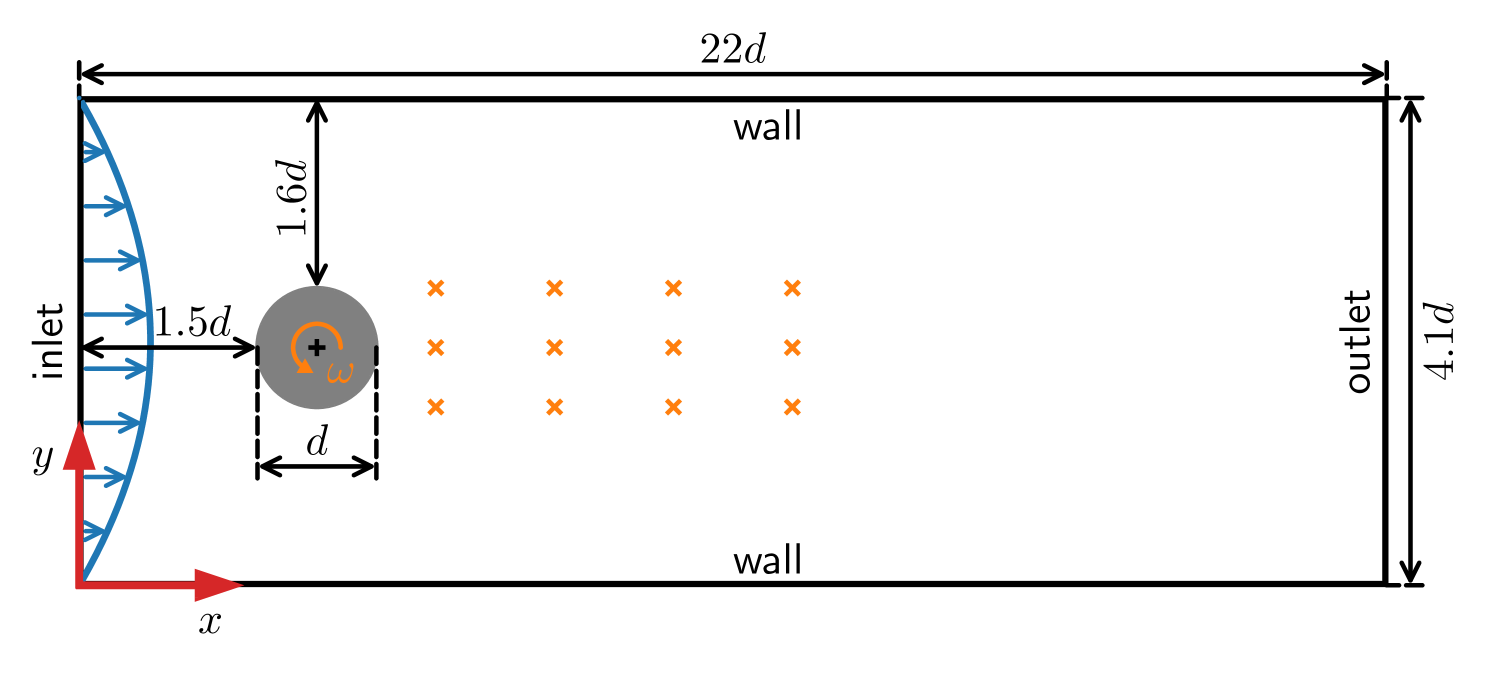
In recent years, deep reinforcement learning has emerged as a technique to solve closed-loop flow control problems. Employing simulation-based environments in reinforcement learning enables a priori end-to-end optimization of the control system, provides a virtual testbed for safety-critical control applications, and allows to gain a deep understanding of the control mechanisms. While reinforcement learning has been applied successfully in a number of rather simple flow control benchmarks, a major bottleneck toward real-world applications is the high computational cost and turnaround time of flow simulations. In this contribution, we demonstrate the benefits of model-based reinforcement learning for flow control applications. Specifically, we optimize the policy by alternating between trajectories sampled from flow simulations and trajectories sampled from an ensemble of environment models. The model-based learning reduces the overall training time by up to $85%$ for the fluidic pinball test case. Even larger savings are expected for more demanding flow simulations.
Read more4/11/2024
0
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
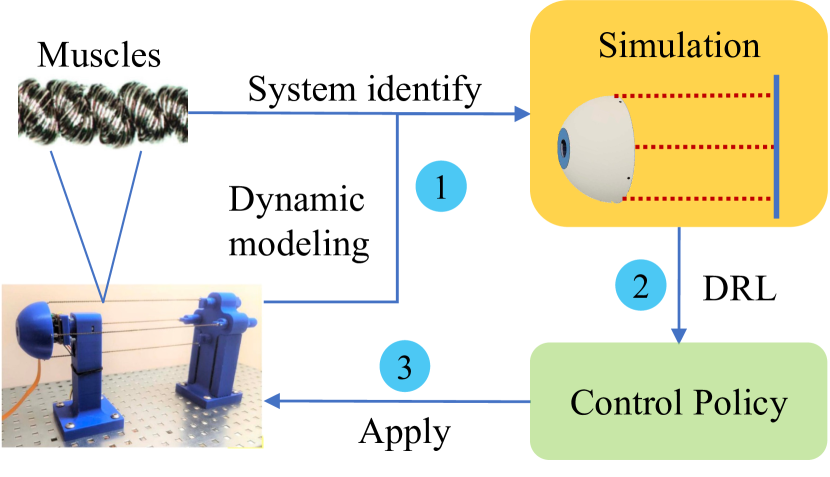
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
Read more6/10/2024