GOI: Find 3D Gaussians of Interest with an Optimizable Open-vocabulary Semantic-space Hyperplane

0

Sign in to get full access
Overview
- This research paper introduces GOI, a method for finding 3D Gaussians of interest in a 3D scene using an optimizable open-vocabulary semantic-space hyperplane.
- The key idea is to learn a hyperplane in a semantic embedding space that can be optimized to identify 3D Gaussian distributions corresponding to objects of interest.
- The method aims to enable open-vocabulary 3D scene understanding, allowing users to specify objects of interest using natural language.
Plain English Explanation
The researchers have developed a new technique called GOI (Find 3D Gaussians of Interest) that allows you to identify specific objects in a 3D scene using natural language. Rather than having to manually label or segment the 3D scene, the GOI method learns a "hyperplane" in a semantic embedding space that can be optimized to automatically find the 3D Gaussian distributions corresponding to the objects you want to find.
The semantic embedding space is a way of representing the meaning of words and concepts in a numerical format that a computer can understand. The GOI method learns to position this hyperplane in the semantic space so that it can effectively "filter out" the 3D Gaussians that correspond to the objects you specify using open-vocabulary natural language. This allows users to simply describe the objects they are interested in, rather than having to provide detailed 3D models or segmentation masks.
The key advantage of this approach is that it enables semantic-aware 3D Gaussian splatting, which goes beyond simple geometry-based 3D object detection. By incorporating semantics, the GOI method can identify objects of interest in a more flexible and generalizable way. This builds upon prior work on 3D scene understanding using Gaussian representations and 3D Gaussian splatting using foundation models.
Technical Explanation
The core of the GOI method is an optimizable hyperplane in a semantic embedding space that is used to identify the 3D Gaussian distributions corresponding to objects of interest. This hyperplane is learned in an end-to-end fashion, allowing it to be optimized directly for the task of finding the desired objects.
The input to the system is a 3D scene represented as a set of 3D Gaussian distributions, as in prior work on hybrid optimization for 3D Gaussian splatting. The system also takes in a natural language description of the objects of interest.
The natural language description is encoded into the semantic embedding space, and the hyperplane is initialized to be orthogonal to this embedding. The hyperplane is then optimized, using gradient-based methods, to maximize the distance between the hyperplane and the 3D Gaussians that do not correspond to the target objects, while minimizing the distance to the Gaussians that do correspond to the target objects.
This optimization process allows the hyperplane to be tuned to the specific objects of interest, enabling real-time, generalizable semantic segmentation of the 3D scene. The authors demonstrate the effectiveness of this approach on several 3D scene understanding benchmarks.
Critical Analysis
The GOI method presents an interesting and potentially powerful approach to open-vocabulary 3D scene understanding. By learning a semantic-space hyperplane that can be optimized for specific objects of interest, the method offers a flexible and generalizable alternative to traditional 3D object detection and segmentation approaches.
However, the paper does not provide a deep analysis of the limitations or potential failure cases of the GOI method. For example, it is unclear how the method would perform in cluttered or occluded scenes, where the 3D Gaussian distributions may not clearly correspond to individual objects. Additionally, the reliance on a semantic embedding space raises questions about the robustness of the method to language ambiguity or domain shift.
Further research would be needed to more thoroughly evaluate the strengths and weaknesses of the GOI approach, as well as its potential for real-world applications in areas like robotics, augmented reality, or autonomous driving. Comparing the GOI method to other state-of-the-art techniques for open-vocabulary 3D scene understanding would also help to situate its contributions within the broader research landscape.
Conclusion
The GOI method introduced in this paper represents an innovative approach to 3D scene understanding that leverages semantic information to enable open-vocabulary object identification. By learning an optimizable hyperplane in a semantic embedding space, the method offers a flexible and generalizable way to find objects of interest in 3D scenes.
While the paper demonstrates promising results, further research is needed to fully understand the strengths, limitations, and potential real-world applications of the GOI technique. Nevertheless, this work represents an important step forward in the field of 3D scene understanding, paving the way for more intuitive and user-friendly 3D perception systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GOI: Find 3D Gaussians of Interest with an Optimizable Open-vocabulary Semantic-space Hyperplane
Yansong Qu, Shaohui Dai, Xinyang Li, Jianghang Lin, Liujuan Cao, Shengchuan Zhang, Rongrong Ji
3D open-vocabulary scene understanding, crucial for advancing augmented reality and robotic applications, involves interpreting and locating specific regions within a 3D space as directed by natural language instructions. To this end, we introduce GOI, a framework that integrates semantic features from 2D vision-language foundation models into 3D Gaussian Splatting (3DGS) and identifies 3D Gaussians of Interest using an Optimizable Semantic-space Hyperplane. Our approach includes an efficient compression method that utilizes scene priors to condense noisy high-dimensional semantic features into compact low-dimensional vectors, which are subsequently embedded in 3DGS. During the open-vocabulary querying process, we adopt a distinct approach compared to existing methods, which depend on a manually set fixed empirical threshold to select regions based on their semantic feature distance to the query text embedding. This traditional approach often lacks universal accuracy, leading to challenges in precisely identifying specific target areas. Instead, our method treats the feature selection process as a hyperplane division within the feature space, retaining only those features that are highly relevant to the query. We leverage off-the-shelf 2D Referring Expression Segmentation (RES) models to fine-tune the semantic-space hyperplane, enabling a more precise distinction between target regions and others. This fine-tuning substantially improves the accuracy of open-vocabulary queries, ensuring the precise localization of pertinent 3D Gaussians. Extensive experiments demonstrate GOI's superiority over previous state-of-the-art methods. Our project page is available at https://quyans.github.io/GOI-Hyperplane/ .
Read more7/30/2024

0
Semantic Gaussians: Open-Vocabulary Scene Understanding with 3D Gaussian Splatting
Jun Guo, Xiaojian Ma, Yue Fan, Huaping Liu, Qing Li
Open-vocabulary 3D scene understanding presents a significant challenge in computer vision, with wide-ranging applications in embodied agents and augmented reality systems. Existing methods adopt neurel rendering methods as 3D representations and jointly optimize color and semantic features to achieve rendering and scene understanding simultaneously. In this paper, we introduce Semantic Gaussians, a novel open-vocabulary scene understanding approach based on 3D Gaussian Splatting. Our key idea is to distill knowledge from 2D pre-trained models to 3D Gaussians. Unlike existing methods, we design a versatile projection approach that maps various 2D semantic features from pre-trained image encoders into a novel semantic component of 3D Gaussians, which is based on spatial relationship and need no additional training. We further build a 3D semantic network that directly predicts the semantic component from raw 3D Gaussians for fast inference. The quantitative results on ScanNet segmentation and LERF object localization demonstates the superior performance of our method. Additionally, we explore several applications of Semantic Gaussians including object part segmentation, instance segmentation, scene editing, and spatiotemporal segmentation with better qualitative results over 2D and 3D baselines, highlighting its versatility and effectiveness on supporting diverse downstream tasks.
Read more8/26/2024

0
OpenGaussian: Towards Point-Level 3D Gaussian-based Open Vocabulary Understanding
Yanmin Wu, Jiarui Meng, Haijie Li, Chenming Wu, Yahao Shi, Xinhua Cheng, Chen Zhao, Haocheng Feng, Errui Ding, Jingdong Wang, Jian Zhang
This paper introduces OpenGaussian, a method based on 3D Gaussian Splatting (3DGS) capable of 3D point-level open vocabulary understanding. Our primary motivation stems from observing that existing 3DGS-based open vocabulary methods mainly focus on 2D pixel-level parsing. These methods struggle with 3D point-level tasks due to weak feature expressiveness and inaccurate 2D-3D feature associations. To ensure robust feature presentation and 3D point-level understanding, we first employ SAM masks without cross-frame associations to train instance features with 3D consistency. These features exhibit both intra-object consistency and inter-object distinction. Then, we propose a two-stage codebook to discretize these features from coarse to fine levels. At the coarse level, we consider the positional information of 3D points to achieve location-based clustering, which is then refined at the fine level. Finally, we introduce an instance-level 3D-2D feature association method that links 3D points to 2D masks, which are further associated with 2D CLIP features. Extensive experiments, including open vocabulary-based 3D object selection, 3D point cloud understanding, click-based 3D object selection, and ablation studies, demonstrate the effectiveness of our proposed method. Project page: https://3d-aigc.github.io/OpenGaussian
Read more6/5/2024
0
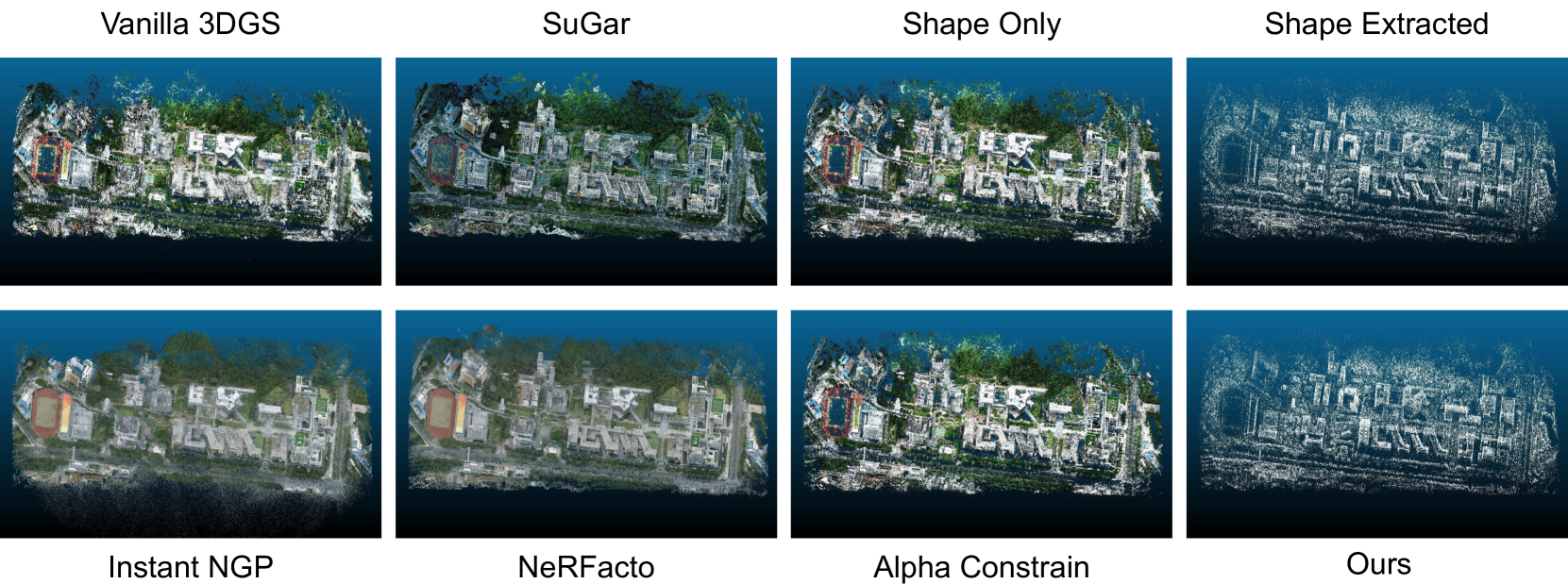
SA-GS: Semantic-Aware Gaussian Splatting for Large Scene Reconstruction with Geometry Constrain
Butian Xiong, Xiaoyu Ye, Tze Ho Elden Tse, Kai Han, Shuguang Cui, Zhen Li
With the emergence of Gaussian Splats, recent efforts have focused on large-scale scene geometric reconstruction. However, most of these efforts either concentrate on memory reduction or spatial space division, neglecting information in the semantic space. In this paper, we propose a novel method, named SA-GS, for fine-grained 3D geometry reconstruction using semantic-aware 3D Gaussian Splats. Specifically, we leverage prior information stored in large vision models such as SAM and DINO to generate semantic masks. We then introduce a geometric complexity measurement function to serve as soft regularization, guiding the shape of each Gaussian Splat within specific semantic areas. Additionally, we present a method that estimates the expected number of Gaussian Splats in different semantic areas, effectively providing a lower bound for Gaussian Splats in these areas. Subsequently, we extract the point cloud using a novel probability density-based extraction method, transforming Gaussian Splats into a point cloud crucial for downstream tasks. Our method also offers the potential for detailed semantic inquiries while maintaining high image-based reconstruction results. We provide extensive experiments on publicly available large-scale scene reconstruction datasets with highly accurate point clouds as ground truth and our novel dataset. Our results demonstrate the superiority of our method over current state-of-the-art Gaussian Splats reconstruction methods by a significant margin in terms of geometric-based measurement metrics. Code and additional results will soon be available on our project page.
Read more5/29/2024