Imitation Learning-Based Online Time-Optimal Control with Multiple-Waypoint Constraints for Quadrotors

0

Sign in to get full access
Overview
- Presents an imitation learning-based online time-optimal control approach for quadrotor navigation with multiple waypoint constraints
- Aims to enable fast and agile flight through cluttered environments while satisfying safety requirements
- Leverages a deep neural network to learn an optimal control policy from demonstrations
Plain English Explanation
The paper describes a new method for controlling quadrotor drones that allows them to navigate through cluttered environments quickly and safely. The key idea is to use imitation learning - the drone learns an optimal control policy by observing demonstrations of skilled human pilots.
This learned policy enables the drone to fly in a time-optimal manner while satisfying constraints like passing through specific waypoints. The approach is designed to enable fast, agile flight through cluttered areas without compromising safety. By learning from expert demonstrations, the drone can navigate complex environments more effectively than traditional control approaches.
Technical Explanation
The paper presents an imitation learning-based framework for online time-optimal control of quadrotors with multiple waypoint constraints. The authors train a deep neural network to learn an optimal control policy from demonstrations of skilled human pilots navigating through cluttered environments.
The network takes in the quadrotor's current state (position, velocity, etc.) and waypoint information, and outputs the optimal control commands (thrust, torque) to reach the next waypoint in minimum time. By imitating the expert demonstrations, the network learns to execute time-optimal trajectories that satisfy safety constraints like obstacle avoidance.
The authors evaluate their approach in simulation and real-world experiments, demonstrating its ability to enable fast, agile quadrotor flight through cluttered environments while respecting waypoint and safety requirements. The results show significant improvements in flight time over baseline approaches.
Critical Analysis
The paper presents a promising approach for enabling fast, safe quadrotor navigation in cluttered environments. The use of imitation learning to learn an optimal control policy from expert demonstrations is a clever way to bypass the challenges of model-based optimal control in complex settings.
However, the authors acknowledge several limitations. The approach assumes the availability of accurate state estimation and a known environment map, which may not always be the case in real-world scenarios. Additionally, the learned policy may not generalize well to novel environments or tasks beyond the specific training demonstrations.
Further research could explore ways to relax these assumptions, such as by incorporating online replanning or reinforcement learning techniques to handle uncertainty and adapt to changing conditions. Integrating this approach with other model predictive control or learning-based methods could also be an interesting direction for future work.
Conclusion
The paper presents a novel imitation learning-based approach for enabling time-optimal control of quadrotors with multiple waypoint constraints. By learning an optimal control policy from expert demonstrations, the system can enable fast, agile flight through cluttered environments while satisfying safety requirements.
This work represents an important step towards enabling more capable and autonomous drone navigation in complex real-world settings. While the current approach has some limitations, the authors' insights and the general framework could inspire further advancements in this area, potentially leading to more robust and versatile drone control systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Imitation Learning-Based Online Time-Optimal Control with Multiple-Waypoint Constraints for Quadrotors
Jin Zhou, Jiahao Mei, Fangguo Zhao, Jiming Chen, Shuo Li
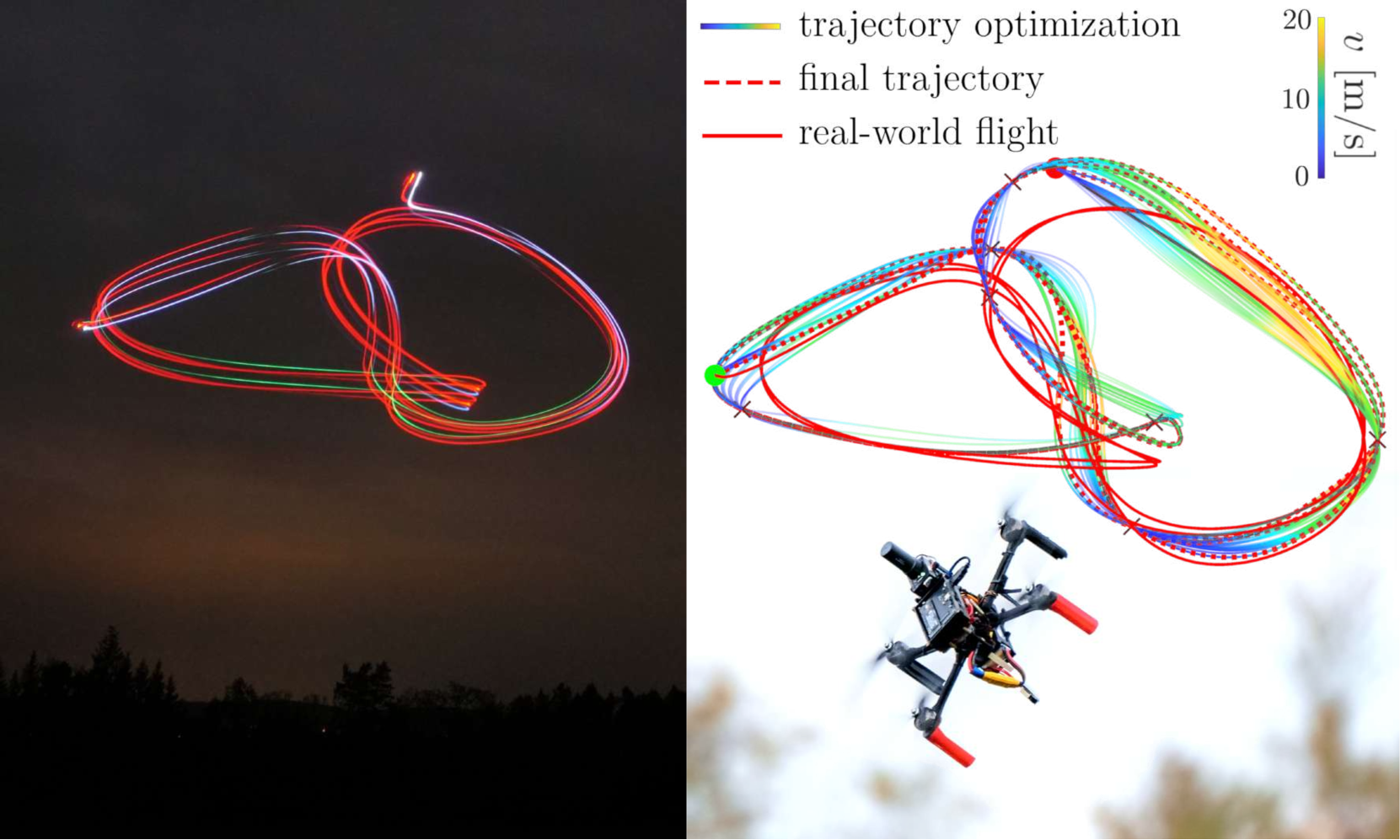
Over the past decade, there has been a remarkable surge in utilizing quadrotors for various purposes due to their simple structure and aggressive maneuverability, such as search and rescue, delivery and autonomous drone racing, etc. One of the key challenges preventing quadrotors from being widely used in these scenarios is online waypoint-constrained time-optimal trajectory generation and control technique. This letter proposes an imitation learning-based online solution to efficiently navigate the quadrotor through multiple waypoints with time-optimal performance. The neural networks (WN&CNets) are trained to learn the control law from the dataset generated by the time-consuming CPC algorithm and then deployed to generate the optimal control commands online to guide the quadrotors. To address the challenge of limited training data and the hover maneuver at the final waypoint, we propose a transition phase strategy that utilizes MINCO trajectories to help the quadrotor 'jump over' the stop-and-go maneuver when switching waypoints. Our method is demonstrated in both simulation and real-world experiments, achieving a maximum speed of 5.6m/s while navigating through 7 waypoints in a confined space of 5.5m*5.5m*2.0m. The results show that with a slight loss in optimality, the WN&CNets significantly reduce the processing time and enable online optimal control for multiple-waypoint constrained flight tasks.
Read more9/11/2024

0
Dashing for the Golden Snitch: Multi-Drone Time-Optimal Motion Planning with Multi-Agent Reinforcement Learning
Xian Wang, Jin Zhou, Yuanli Feng, Jiahao Mei, Jiming Chen, Shuo Li
Recent innovations in autonomous drones have facilitated time-optimal flight in single-drone configurations and enhanced maneuverability in multi-drone systems through the application of optimal control and learning-based methods. However, few studies have achieved time-optimal motion planning for multi-drone systems, particularly during highly agile maneuvers or in dynamic scenarios. This paper presents a decentralized policy network for time-optimal multi-drone flight using multi-agent reinforcement learning. To strike a balance between flight efficiency and collision avoidance, we introduce a soft collision penalty inspired by optimization-based methods. By customizing PPO in a centralized training, decentralized execution (CTDE) fashion, we unlock higher efficiency and stability in training, while ensuring lightweight implementation. Extensive simulations show that, despite slight performance trade-offs compared to single-drone systems, our multi-drone approach maintains near-time-optimal performance with low collision rates. Real-world experiments validate our method, with two quadrotors using the same network as simulation achieving a maximum speed of 13.65 m/s and a maximum body rate of 13.4 rad/s in a 5.5 m * 5.5 m * 2.0 m space across various tracks, relying entirely on onboard computation.
Read more9/26/2024

0
Gate-Aware Online Planning for Two-Player Autonomous Drone Racing
Fangguo Zhao, Jiahao Mei, Jin Zhou, Yuanyi Chen, Jiming Chen, Shuo Li
The flying speed of autonomous quadrotors has increased significantly over the past 5 years, particularly in the field of autonomous drone racing. However, most research primarily focuses on the aggressive flight of a single quadrotor, simplifying the racing gate traversal problem to a waypoint passing problem that neglects the orientations of the racing gates. In this paper, we propose a systematic method called Pairwise Model Predictive Control (PMPC) that can guide two quadrotors online to navigate racing gates with minimal time and without collisions. The flight task is initially simplified as a point-mass model waypoint passing problem to provide analytical time optimal reference through an efficient two-step velocity search method. Subsequently, we utilize the spatial configuration of the racing track to compute the optimal heading at each gate, maximizing the visibility of subsequent gates for the quadrotors. To address varying gate orientations, we introduce a novel Magnetic Induction Line-based spatial curve to guide the quadrotors through racing gates of different orientations. Furthermore, we formulate a nonlinear optimization problem that uses the point-mass trajectory as initial values and references to enhance solving efficiency, enabling the method to run onboard at a frequency of 200 Hz. The feasibility of the proposed method is validated through both simulation and real-world experiments. In real-world tests, the two quadrotors achieved a top speed of 6.1 m/s on a 7-waypoint racing track within a compact flying arena of 5 m * 4 m * 2 m.
Read more9/24/2024
0
Real-time Planning of Minimum-time Trajectories for Agile UAV Flight
Krystof Teissing, Matej Novosad, Robert Penicka, Martin Saska
We address the challenge of real-time planning of minimum-time trajectories over multiple waypoints, onboard multirotor UAVs. Previous works demonstrated that achieving a truly time-optimal trajectory is computationally too demanding to enable frequent replanning during agile flight, especially on less powerful flight computers. Our approach overcomes this stumbling block by utilizing a point-mass model with a novel iterative thrust decomposition algorithm, enabling the UAV to use all of its collective thrust, something previous point-mass approaches could not achieve. The approach enables gravity and drag modeling integration, significantly reducing tracking errors in high-speed trajectories, which is proven through an ablation study. When combined with a new multi-waypoint optimization algorithm, which uses a gradient-based method to converge to optimal velocities in waypoints, the proposed method generates minimum-time multi-waypoint trajectories within milliseconds. The proposed approach, which we provide as open-source package, is validated both in simulation and in real-world, using Nonlinear Model Predictive Control. With accelerations of up to 3.5g and speeds over 100 km/h, trajectories generated by the proposed method yield similar or even smaller tracking errors than the trajectories generated for a full multirotor model.
Read more9/25/2024