Learning to Use Tools via Cooperative and Interactive Agents

0

Sign in to get full access
Overview
- This paper explores how large language models (LLMs) can be trained to use tools effectively through cooperative and interactive agents.
- The researchers propose a framework for teaching LLMs to leverage tools to accomplish complex tasks, with a focus on grounding LLM knowledge in real-world embodied interactions.
- The paper builds on recent advancements in embodied LLM agents, continual tool learning, and collaborative multi-agent systems to develop a novel approach for efficient LLM grounding and tool usage.
Plain English Explanation
The paper discusses how large language models (LLMs), which are powerful AI systems trained on vast amounts of text data, can be taught to use physical tools effectively. The researchers propose a framework that involves training these LLMs through cooperative and interactive agents, where the LLM learns to collaborate with other agents to accomplish complex tasks.
The key idea is to ground the LLM's knowledge in real-world, embodied interactions, rather than just text-based learning. By having the LLM work together with other agents to use tools in a physical environment, it can develop a deeper understanding of how those tools function and how to leverage them to achieve its goals.
This approach builds on recent advancements in the field of embodied AI, where AI systems are designed to interact with and learn from their physical surroundings, rather than just processing information in the abstract. The researchers also draw on work in areas like continual tool learning, where AI systems can continuously expand their repertoire of tool-using skills, and collaborative multi-agent systems, where multiple AI agents work together to solve complex problems.
By combining these ideas, the researchers hope to develop LLMs that can effectively use a wide range of tools to accomplish complex tasks, opening up new possibilities for how these powerful AI systems can be applied in the real world.
Technical Explanation
The paper proposes a framework for training large language models (LLMs) to use tools effectively through cooperative and interactive agents. The key elements of the approach include:
-
Embodied LLM Agents: The researchers create a simulated environment where LLM-based agents can physically interact with and use various tools. This allows the LLMs to ground their knowledge in real-world embodied experiences, rather than just text-based learning.
-
Cooperative Multi-Agent Interactions: The LLM agents are trained to collaborate with other agents to accomplish complex tasks that require the use of tools. This encourages the LLMs to develop cooperative and interactive tool-using skills.
-
Continual Tool Learning: The agents are able to continuously expand their repertoire of tool-using skills, allowing the LLMs to learn how to use a wide range of tools over time. This is facilitated by the continual tool learning approach.
-
Efficient LLM Grounding: The researchers leverage techniques from the embodied multi-agent literature to efficiently ground the LLM's knowledge in the physical environment, enabling it to effectively translate its language-based understanding into tool-using actions.
The paper presents a series of experiments and simulations that demonstrate the effectiveness of this framework in teaching LLMs to use a variety of tools, both individually and in cooperation with other agents. The results suggest that this approach can lead to significant improvements in the LLMs' tool-using capabilities compared to traditional, text-based training.
Critical Analysis
The paper provides a compelling and well-designed framework for training LLMs to use tools effectively through cooperative and interactive agents. The researchers have clearly built upon recent advancements in related fields, such as embodied LLM agents, continual tool learning, and efficient LLM grounding, to develop a novel and promising approach.
One potential limitation of the research is the reliance on simulated environments, which may not fully capture the complexities and nuances of real-world tool-using scenarios. While the simulations provide a controlled and scalable setting for experimentation, it would be valuable to see how the framework performs in physical, embodied settings.
Additionally, the paper does not address potential safety and ethical concerns that may arise as LLMs become more capable of using tools in the real world. As these systems become more powerful, it will be important to consider the implications of their tool-using abilities and to develop appropriate safeguards and guidelines.
Despite these potential caveats, the research presented in this paper represents an exciting and important step towards developing LLMs that can effectively leverage tools to accomplish complex tasks. By bridging the gap between language-based understanding and physical embodiment, the researchers have opened up new avenues for the practical application of these powerful AI systems.
Conclusion
This paper presents a novel framework for training large language models (LLMs) to use tools effectively through cooperative and interactive agents. By grounding the LLMs' knowledge in real-world embodied interactions, the researchers have developed an approach that allows these powerful AI systems to translate their language-based understanding into practical tool-using skills.
The key innovations of the framework, including the use of embodied LLM agents, cooperative multi-agent interactions, continual tool learning, and efficient LLM grounding, represent significant advancements in the field of AI and robotics. If successfully implemented, this approach could pave the way for LLMs to be used in a wide range of practical applications that require the effective use of tools, from assistive technologies to industrial automation.
While the paper identifies some potential limitations and areas for further research, the overall impact of this work is undeniable. By bridging the gap between language and physical embodiment, the researchers have taken an important step towards realizing the full potential of large language models and their ability to interact with and shape the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning to Use Tools via Cooperative and Interactive Agents
Zhengliang Shi, Shen Gao, Xiuyi Chen, Yue Feng, Lingyong Yan, Haibo Shi, Dawei Yin, Pengjie Ren, Suzan Verberne, Zhaochun Ren
Tool learning empowers large language models (LLMs) as agents to use external tools and extend their utility. Existing methods employ one single LLM-based agent to iteratively select and execute tools, thereafter incorporating execution results into the next action prediction. Despite their progress, these methods suffer from performance degradation when addressing practical tasks due to: (1) the pre-defined pipeline with restricted flexibility to calibrate incorrect actions, and (2) the struggle to adapt a general LLM-based agent to perform a variety of specialized actions. To mitigate these problems, we propose ConAgents, a Cooperative and interactive Agents framework, which coordinates three specialized agents for tool selection, tool execution, and action calibration separately. ConAgents introduces two communication protocols to enable the flexible cooperation of agents. To effectively generalize the ConAgents into open-source models, we also propose specialized action distillation, enhancing their ability to perform specialized actions in our framework. Our extensive experiments on three datasets show that the LLMs, when equipped with the ConAgents, outperform baselines with substantial improvement (i.e., up to 14% higher success rate).
Read more6/26/2024
0
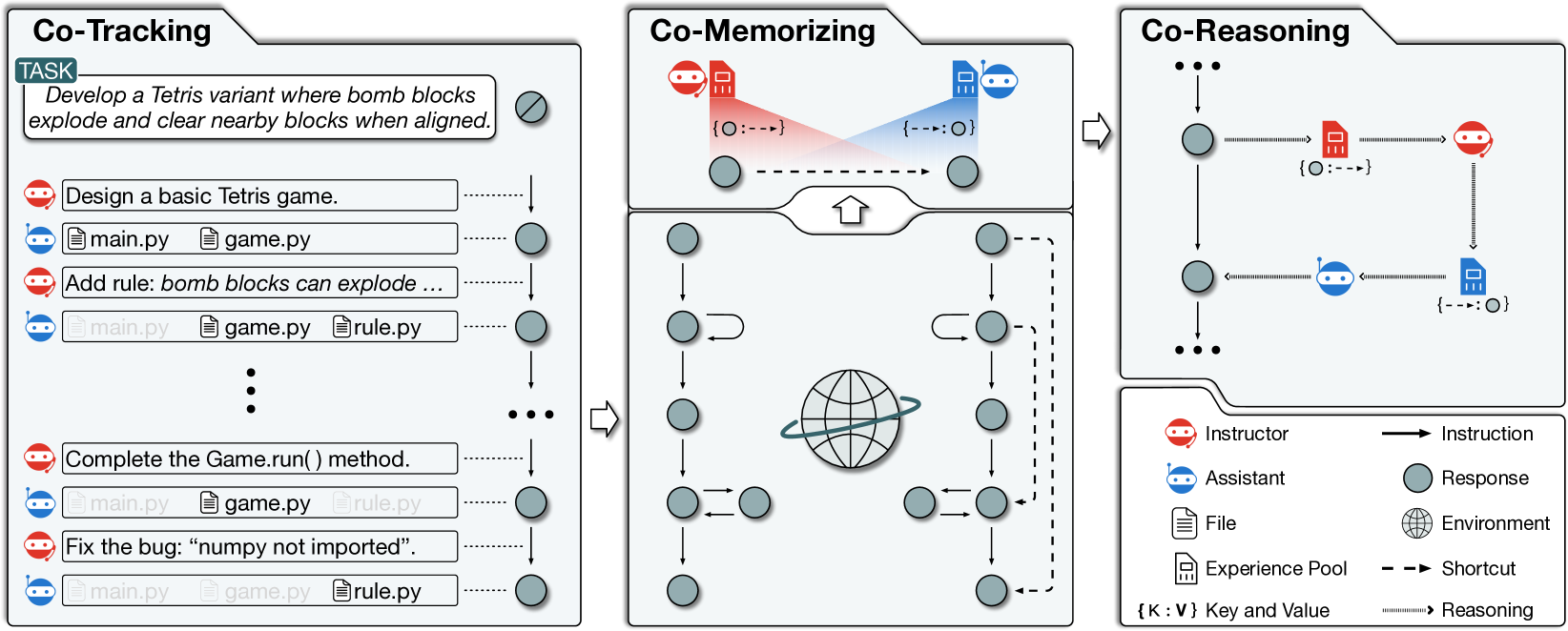
Experiential Co-Learning of Software-Developing Agents
Chen Qian, Yufan Dang, Jiahao Li, Wei Liu, Zihao Xie, Yifei Wang, Weize Chen, Cheng Yang, Xin Cong, Xiaoyin Che, Zhiyuan Liu, Maosong Sun
Recent advancements in large language models (LLMs) have brought significant changes to various domains, especially through LLM-driven autonomous agents. A representative scenario is in software development, where LLM agents demonstrate efficient collaboration, task division, and assurance of software quality, markedly reducing the need for manual involvement. However, these agents frequently perform a variety of tasks independently, without benefiting from past experiences, which leads to repeated mistakes and inefficient attempts in multi-step task execution. To this end, we introduce Experiential Co-Learning, a novel LLM-agent learning framework in which instructor and assistant agents gather shortcut-oriented experiences from their historical trajectories and use these past experiences for future task execution. The extensive experiments demonstrate that the framework enables agents to tackle unseen software-developing tasks more effectively. We anticipate that our insights will guide LLM agents towards enhanced autonomy and contribute to their evolutionary growth in cooperative learning. The code and data are available at https://github.com/OpenBMB/ChatDev.
Read more6/6/2024
0
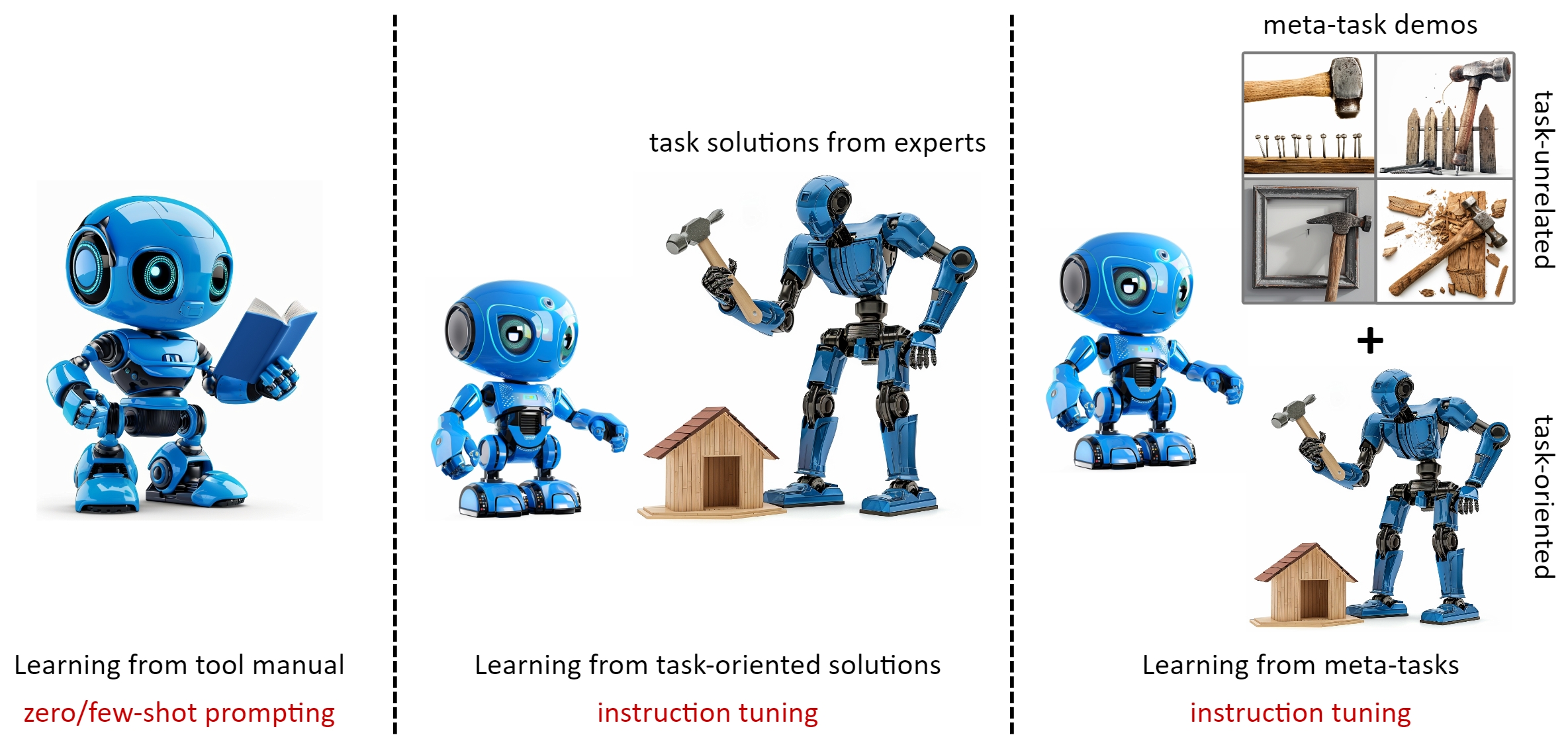
MetaTool: Facilitating Large Language Models to Master Tools with Meta-task Augmentation
Xiaohan Wang, Dian Li, Yilin Zhao, Sinbadliu, Hui Wang
Utilizing complex tools with Large Language Models (LLMs) is a critical component for grounding AI agents in various real-world scenarios. The core challenge of manipulating tools lies in understanding their usage and functionality. The prevailing approach involves few-shot prompting with demonstrations or fine-tuning on expert trajectories. However, for complex tools and tasks, mere in-context demonstrations may fail to cover sufficient knowledge. Training-based methods are also constrained by the high cost of dataset construction and limited generalizability. In this paper, we introduce a new tool learning methodology (MetaTool) that is generalizable for mastering any reusable toolset. Our approach includes a self-supervised data augmentation technique that enables LLMs to gain a comprehensive understanding of various tools, thereby improving their ability to complete tasks effectively. We develop a series of meta-tasks that involve predicting masked factors of tool execution. These self-supervised tasks enable the automatic generation of high-quality QA data concerning tool comprehension. By incorporating meta-task data into the instruction tuning process, the proposed MetaTool model achieves significant superiority to open-source models and is comparable to GPT-4/GPT-3.5 on multiple tool-oriented tasks.
Read more7/19/2024
0
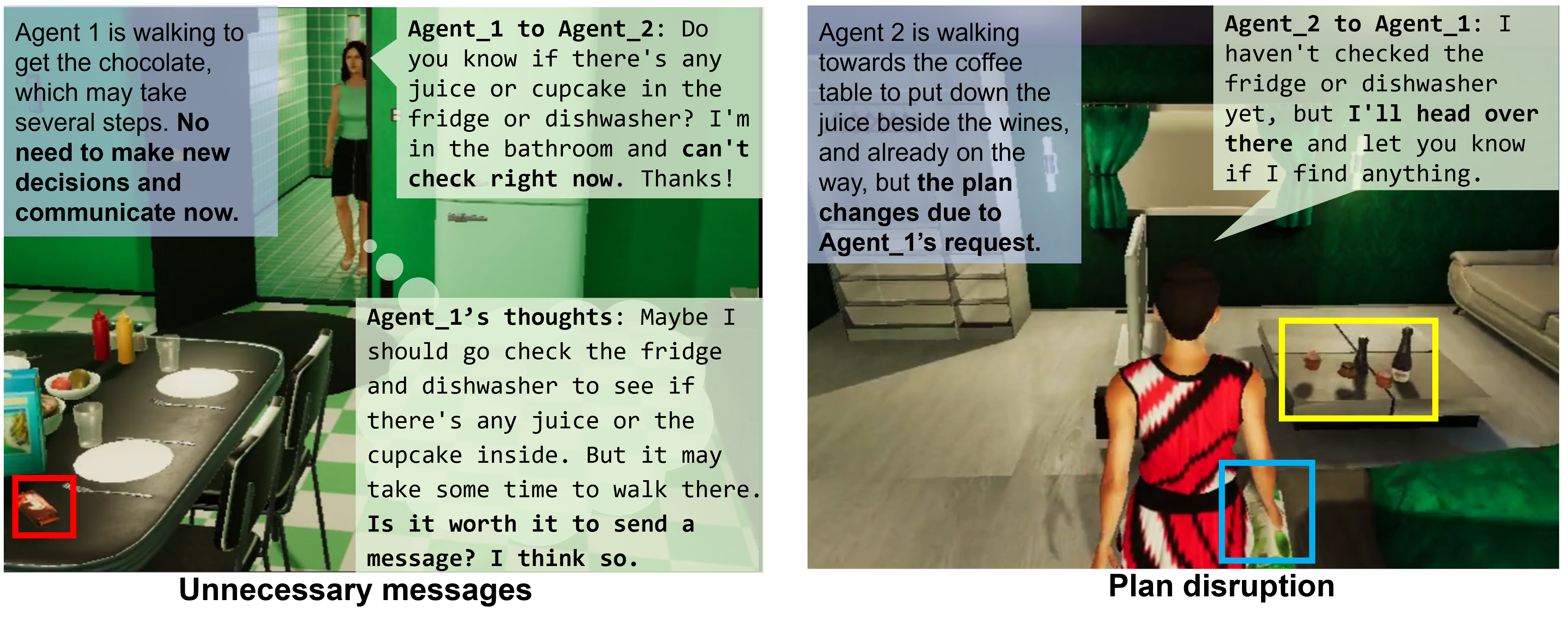
Embodied LLM Agents Learn to Cooperate in Organized Teams
Xudong Guo, Kaixuan Huang, Jiale Liu, Wenhui Fan, Natalia V'elez, Qingyun Wu, Huazheng Wang, Thomas L. Griffiths, Mengdi Wang
Large Language Models (LLMs) have emerged as integral tools for reasoning, planning, and decision-making, drawing upon their extensive world knowledge and proficiency in language-related tasks. LLMs thus hold tremendous potential for natural language interaction within multi-agent systems to foster cooperation. However, LLM agents tend to over-report and comply with any instruction, which may result in information redundancy and confusion in multi-agent cooperation. Inspired by human organizations, this paper introduces a framework that imposes prompt-based organization structures on LLM agents to mitigate these problems. Through a series of experiments with embodied LLM agents and human-agent collaboration, our results highlight the impact of designated leadership on team efficiency, shedding light on the leadership qualities displayed by LLM agents and their spontaneous cooperative behaviors. Further, we harness the potential of LLMs to propose enhanced organizational prompts, via a Criticize-Reflect process, resulting in novel organization structures that reduce communication costs and enhance team efficiency.
Read more5/24/2024