Multi-Agent Probabilistic Ensembles with Trajectory Sampling for Connected Autonomous Vehicles

0

Sign in to get full access
Overview
- This paper presents a multi-agent probabilistic ensembles with trajectory sampling (MAPETS) approach for connected autonomous vehicle (CAV) control
- The method combines model-based reinforcement learning, probabilistic ensembles, and trajectory sampling to address the challenges of multi-agent coordination and uncertainty in CAV environments
- Key contributions include a novel MAPETS algorithm, integration of communication and uncertainty awareness, and evaluation on realistic multi-agent CAV scenarios
Plain English Explanation
The paper tackles the challenge of controlling connected autonomous vehicles (CAVs) in complex, multi-agent environments. CAVs need to coordinate with each other and navigate safely, even when there is uncertainty about the future actions of other vehicles.
To address this, the researchers developed a new approach called "multi-agent probabilistic ensembles with trajectory sampling (MAPETS)". MAPETS combines several advanced techniques:
- Model-based reinforcement learning: The CAVs learn how to control themselves by interacting with a simulated environment and getting feedback on their actions.
- Probabilistic ensembles: Instead of relying on a single prediction model, MAPETS uses an ensemble of models to capture the inherent uncertainty in the CAV environment.
- Trajectory sampling: MAPETS simulates many possible future trajectories for the CAVs and other vehicles, allowing it to plan actions that account for these uncertainties.
By integrating these components, MAPETS enables the CAVs to make better decisions, coordinate more effectively, and navigate safely even in complex, unpredictable multi-agent scenarios. This could have important implications for the development of reliable self-driving car systems.
Technical Explanation
The paper proposes a "multi-agent probabilistic ensembles with trajectory sampling (MAPETS)" approach for connected autonomous vehicle (CAV) control.
The key elements of the MAPETS framework are:
-
Model-based reinforcement learning: The CAVs learn how to control themselves by interacting with a simulated environment and receiving rewards/penalties for their actions. This allows them to learn effective policies without requiring extensive real-world training.
-
Probabilistic ensembles: Instead of relying on a single prediction model, MAPETS uses an ensemble of models to capture the inherent uncertainty in the CAV environment. This ensemble provides a distribution of possible future outcomes.
-
Trajectory sampling: MAPETS simulates many possible future trajectories for the CAVs and other vehicles based on the probabilistic ensemble. This allows the system to plan actions that account for these uncertainties and coordinate the CAVs more effectively.
The paper evaluates MAPETS on realistic multi-agent CAV scenarios and demonstrates improved performance compared to baseline approaches in terms of safety, efficiency, and scalability. The integration of communication and uncertainty awareness are also shown to be critical components of the approach.
Critical Analysis
The paper presents a compelling approach to the challenging problem of coordinating connected autonomous vehicles in complex, uncertain environments. The use of model-based reinforcement learning, probabilistic ensembles, and trajectory sampling is a novel and well-reasoned combination of techniques to address the key issues of multi-agent coordination and uncertainty.
However, the paper does not discuss several potential limitations or areas for further research:
-
The reliance on a simulated environment for training and evaluation, which may not fully capture the complexities of the real world. Further validation on physical CAV testbeds or in real-world pilot deployments would be beneficial.
-
The computational and memory requirements of the probabilistic ensemble and trajectory sampling approach, which could limit scalability or real-time performance in large-scale CAV networks. Techniques for dynamically managing the model complexity may be needed.
-
The assumption of perfect communication and information sharing between CAVs, which may not be realistic in all scenarios. Addressing partial observability and communication constraints would be an important next step.
Overall, the MAPETS approach represents a significant advancement in multi-agent CAV control, but further research is needed to address these practical limitations and develop a truly robust and scalable solution for real-world deployment.
Conclusion
This paper presents a novel "multi-agent probabilistic ensembles with trajectory sampling (MAPETS)" approach for coordinating connected autonomous vehicles (CAVs) in complex, uncertain environments. By combining model-based reinforcement learning, probabilistic ensembles, and trajectory sampling, MAPETS enables CAVs to make more informed decisions, coordinate more effectively, and navigate safely even in the presence of uncertainty about the actions of other vehicles.
The key contributions of this work include the MAPETS algorithm, the integration of communication and uncertainty awareness, and the evaluation on realistic multi-agent CAV scenarios. While the results are promising, further research is needed to address practical limitations such as the reliance on simulation, computational requirements, and the assumption of perfect communication.
Overall, this paper represents an important step forward in the development of reliable and scalable self-driving car systems, with potential implications for the broader field of multi-agent coordination and decision-making under uncertainty.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Multi-Agent Probabilistic Ensembles with Trajectory Sampling for Connected Autonomous Vehicles
Ruoqi Wen, Jiahao Huang, Rongpeng Li, Guoru Ding, Zhifeng Zhao
Autonomous Vehicles (AVs) have attracted significant attention in recent years and Reinforcement Learning (RL) has shown remarkable performance in improving the autonomy of vehicles. In that regard, the widely adopted Model-Free RL (MFRL) promises to solve decision-making tasks in connected AVs (CAVs), contingent on the readiness of a significant amount of data samples for training. Nevertheless, it might be infeasible in practice and possibly lead to learning instability. In contrast, Model-Based RL (MBRL) manifests itself in sample-efficient learning, but the asymptotic performance of MBRL might lag behind the state-of-the-art MFRL algorithms. Furthermore, most studies for CAVs are limited to the decision-making of a single AV only, thus underscoring the performance due to the absence of communications. In this study, we try to address the decision-making problem of multiple CAVs with limited communications and propose a decentralized Multi-Agent Probabilistic Ensembles with Trajectory Sampling algorithm MA-PETS. In particular, in order to better capture the uncertainty of the unknown environment, MA-PETS leverages Probabilistic Ensemble (PE) neural networks to learn from communicated samples among neighboring CAVs. Afterwards, MA-PETS capably develops Trajectory Sampling (TS)-based model-predictive control for decision-making. On this basis, we derive the multi-agent group regret bound affected by the number of agents within the communication range and mathematically validate that incorporating effective information exchange among agents into the multi-agent learning scheme contributes to reducing the group regret bound in the worst case. Finally, we empirically demonstrate the superiority of MA-PETS in terms of the sample efficiency comparable to MFBL.
Read more7/18/2024

0
Safety Guaranteed Robust Multi-Agent Reinforcement Learning with Hierarchical Control for Connected and Automated Vehicles
Zhili Zhang, H M Sabbir Ahmad, Ehsan Sabouni, Yanchao Sun, Furong Huang, Wenchao Li, Fei Miao
We address the problem of coordination and control of Connected and Automated Vehicles (CAVs) in the presence of imperfect observations in mixed traffic environment. A commonly used approach is learning-based decision-making, such as reinforcement learning (RL). However, most existing safe RL methods suffer from two limitations: (i) they assume accurate state information, and (ii) safety is generally defined over the expectation of the trajectories. It remains challenging to design optimal coordination between multi-agents while ensuring hard safety constraints under system state uncertainties (e.g., those that arise from noisy sensor measurements, communication, or state estimation methods) at every time step. We propose a safety guaranteed hierarchical coordination and control scheme called Safe-RMM to address the challenge. Specifically, the high-level coordination policy of CAVs in mixed traffic environment is trained by the Robust Multi-Agent Proximal Policy Optimization (RMAPPO) method. Though trained without uncertainty, our method leverages a worst-case Q network to ensure the model's robust performances when state uncertainties are present during testing. The low-level controller is implemented using model predictive control (MPC) with robust Control Barrier Functions (CBFs) to guarantee safety through their forward invariance property. We compare our method with baselines in different road networks in the CARLA simulator. Results show that our method provides best evaluated safety and efficiency in challenging mixed traffic environments with uncertainties.
Read more9/25/2024
0
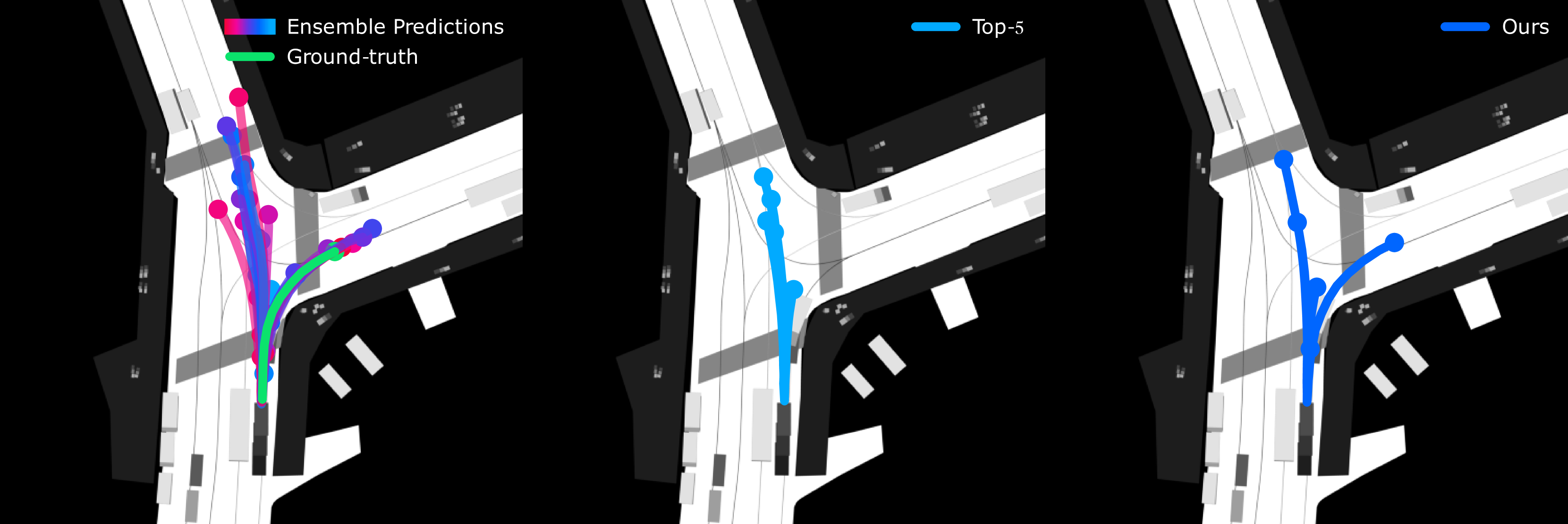
Motion Forecasting via Model-Based Risk Minimization
Aron Distelzweig, Eitan Kosman, Andreas Look, Faris Janjov{s}, Denesh K. Manivannan, Abhinav Valada
Forecasting the future trajectories of surrounding agents is crucial for autonomous vehicles to ensure safe, efficient, and comfortable route planning. While model ensembling has improved prediction accuracy in various fields, its application in trajectory prediction is limited due to the multi-modal nature of predictions. In this paper, we propose a novel sampling method applicable to trajectory prediction based on the predictions of multiple models. We first show that conventional sampling based on predicted probabilities can degrade performance due to missing alignment between models. To address this problem, we introduce a new method that generates optimal trajectories from a set of neural networks, framing it as a risk minimization problem with a variable loss function. By using state-of-the-art models as base learners, our approach constructs diverse and effective ensembles for optimal trajectory sampling. Extensive experiments on the nuScenes prediction dataset demonstrate that our method surpasses current state-of-the-art techniques, achieving top ranks on the leaderboard. We also provide a comprehensive empirical study on ensembling strategies, offering insights into their effectiveness. Our findings highlight the potential of advanced ensembling techniques in trajectory prediction, significantly improving predictive performance and paving the way for more reliable predicted trajectories.
Read more9/23/2024

0
Multi-Agent Reinforcement Learning for Autonomous Driving: A Survey
Ruiqi Zhang, Jing Hou, Florian Walter, Shangding Gu, Jiayi Guan, Florian Rohrbein, Yali Du, Panpan Cai, Guang Chen, Alois Knoll
Reinforcement Learning (RL) is a potent tool for sequential decision-making and has achieved performance surpassing human capabilities across many challenging real-world tasks. As the extension of RL in the multi-agent system domain, multi-agent RL (MARL) not only need to learn the control policy but also requires consideration regarding interactions with all other agents in the environment, mutual influences among different system components, and the distribution of computational resources. This augments the complexity of algorithmic design and poses higher requirements on computational resources. Simultaneously, simulators are crucial to obtain realistic data, which is the fundamentals of RL. In this paper, we first propose a series of metrics of simulators and summarize the features of existing benchmarks. Second, to ease comprehension, we recall the foundational knowledge and then synthesize the recently advanced studies of MARL-related autonomous driving and intelligent transportation systems. Specifically, we examine their environmental modeling, state representation, perception units, and algorithm design. Conclusively, we discuss open challenges as well as prospects and opportunities. We hope this paper can help the researchers integrate MARL technologies and trigger more insightful ideas toward the intelligent and autonomous driving.
Read more8/20/2024