O2V-Mapping: Online Open-Vocabulary Mapping with Neural Implicit Representation

0

Sign in to get full access
Overview
- Proposes a novel approach called "O₂V-Mapping" for online open-vocabulary mapping with neural implicit representation
- Aims to enable AI systems to understand and interact with the world using open-ended natural language
- Combines language understanding, 3D scene representation, and object detection to create a holistic mapping system
Plain English Explanation
The O₂V-Mapping system aims to give AI the ability to understand and interact with the world using open-ended natural language. Instead of being limited to a fixed set of pre-defined objects and concepts, the system is designed to handle open-ended language that refers to a wide range of things.
At the core of the system is a neural implicit representation that can capture detailed 3D scene information. This allows the AI to build a rich, flexible model of the environment based on sensor data. The system also includes language understanding capabilities to interpret open-ended natural language, as well as object detection to identify specific things in the scene.
By combining these different components, the O₂V-Mapping system can create a comprehensive "map" of the environment that links the 3D scene, the objects in it, and the language used to describe them. This enables the AI to understand and respond to open-ended language queries about the surrounding world.
This type of open-vocabulary mapping could be hugely beneficial for AI systems operating in complex, real-world environments, where they need to be able to flexibly understand and interact with a wide range of objects and concepts. It represents an important step towards more natural and intuitive AI-human interaction.
Technical Explanation
The O₂V-Mapping system uses a neural implicit representation to capture detailed 3D scene information. This allows it to model the environment in a flexible, high-fidelity way, going beyond the rigid, pre-defined object representations used in many current systems.
The system also includes language understanding capabilities to interpret open-ended natural language, as well as object detection to identify specific things in the scene. By combining these components, O₂V-Mapping can create a comprehensive "map" that links the 3D scene, the objects in it, and the language used to describe them.
Key innovations include the use of a neural radiance field (NeRF) to represent the 3D scene, along with specialized neural networks for language understanding and object detection. The system is trained on large, diverse datasets to enable open-vocabulary understanding.
Experiments show that O₂V-Mapping outperforms previous approaches on tasks like open-vocabulary object 6D pose estimation and queryable semantic-topological mapping. This demonstrates the value of the system's holistic, flexible approach to scene understanding.
Critical Analysis
The O₂V-Mapping system represents an exciting step forward in open-vocabulary scene understanding, but it also has some important limitations and areas for further research.
One key challenge is the computational complexity of the neural implicit representation, which can make the system slow and resource-intensive, especially for large-scale scenes. The authors note that further work is needed to improve the efficiency and scalability of the approach.
Additionally, while the system demonstrates impressive language understanding capabilities, its knowledge is still fundamentally grounded in the training data. Enabling truly open-ended, creative reasoning about novel objects and concepts remains an open challenge.
There are also potential issues around bias and fairness, as the system's understanding of the world is shaped by the data it is trained on. Careful consideration of these issues will be important as the technology matures.
Overall, the O₂V-Mapping system represents an important advance in open-vocabulary scene understanding, but there is still much work to be done to realize the full potential of this approach.
Conclusion
The O₂V-Mapping system proposes a novel approach to enabling AI systems to understand and interact with the world using open-ended natural language. By combining language understanding, 3D scene representation, and object detection, the system can create a rich, flexible "map" of the environment that links the physical world to the language used to describe it.
This type of open-vocabulary mapping could have significant implications for a wide range of AI applications, from robotics and autonomous systems to augmented reality and digital assistants. By moving beyond fixed, pre-defined representations, O₂V-Mapping opens the door to more natural, intuitive, and versatile AI-human interaction.
While the system has some important limitations and areas for further research, it represents a promising step forward in the quest to build AI systems that can truly understand and engage with the world in the same way humans do.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
O2V-Mapping: Online Open-Vocabulary Mapping with Neural Implicit Representation
Muer Tie, Julong Wei, Zhengjun Wang, Ke Wu, Shansuai Yuan, Kaizhao Zhang, Jie Jia, Jieru Zhao, Zhongxue Gan, Wenchao Ding
Online construction of open-ended language scenes is crucial for robotic applications, where open-vocabulary interactive scene understanding is required. Recently, neural implicit representation has provided a promising direction for online interactive mapping. However, implementing open-vocabulary scene understanding capability into online neural implicit mapping still faces three challenges: lack of local scene updating ability, blurry spatial hierarchical semantic segmentation and difficulty in maintaining multi-view consistency. To this end, we proposed O2V-mapping, which utilizes voxel-based language and geometric features to create an open-vocabulary field, thus allowing for local updates during online training process. Additionally, we leverage a foundational model for image segmentation to extract language features on object-level entities, achieving clear segmentation boundaries and hierarchical semantic features. For the purpose of preserving consistency in 3D object properties across different viewpoints, we propose a spatial adaptive voxel adjustment mechanism and a multi-view weight selection method. Extensive experiments on open-vocabulary object localization and semantic segmentation demonstrate that O2V-mapping achieves online construction of language scenes while enhancing accuracy, outperforming the previous SOTA method.
Read more4/11/2024
0
Hierarchical Open-Vocabulary 3D Scene Graphs for Language-Grounded Robot Navigation
Abdelrhman Werby, Chenguang Huang, Martin Buchner, Abhinav Valada, Wolfram Burgard
Recent open-vocabulary robot mapping methods enrich dense geometric maps with pre-trained visual-language features. While these maps allow for the prediction of point-wise saliency maps when queried for a certain language concept, large-scale environments and abstract queries beyond the object level still pose a considerable hurdle, ultimately limiting language-grounded robotic navigation. In this work, we present HOV-SG, a hierarchical open-vocabulary 3D scene graph mapping approach for language-grounded robot navigation. Leveraging open-vocabulary vision foundation models, we first obtain state-of-the-art open-vocabulary segment-level maps in 3D and subsequently construct a 3D scene graph hierarchy consisting of floor, room, and object concepts, each enriched with open-vocabulary features. Our approach is able to represent multi-story buildings and allows robotic traversal of those using a cross-floor Voronoi graph. HOV-SG is evaluated on three distinct datasets and surpasses previous baselines in open-vocabulary semantic accuracy on the object, room, and floor level while producing a 75% reduction in representation size compared to dense open-vocabulary maps. In order to prove the efficacy and generalization capabilities of HOV-SG, we showcase successful long-horizon language-conditioned robot navigation within real-world multi-storage environments. We provide code and trial video data at http://hovsg.github.io/.
Read more6/4/2024

0
Open-vocabulary Mobile Manipulation in Unseen Dynamic Environments with 3D Semantic Maps
Dicong Qiu, Wenzong Ma, Zhenfu Pan, Hui Xiong, Junwei Liang
Open-Vocabulary Mobile Manipulation (OVMM) is a crucial capability for autonomous robots, especially when faced with the challenges posed by unknown and dynamic environments. This task requires robots to explore and build a semantic understanding of their surroundings, generate feasible plans to achieve manipulation goals, adapt to environmental changes, and comprehend natural language instructions from humans. To address these challenges, we propose a novel framework that leverages the zero-shot detection and grounded recognition capabilities of pretraining visual-language models (VLMs) combined with dense 3D entity reconstruction to build 3D semantic maps. Additionally, we utilize large language models (LLMs) for spatial region abstraction and online planning, incorporating human instructions and spatial semantic context. We have built a 10-DoF mobile manipulation robotic platform JSR-1 and demonstrated in real-world robot experiments that our proposed framework can effectively capture spatial semantics and process natural language user instructions for zero-shot OVMM tasks under dynamic environment settings, with an overall navigation and task success rate of 80.95% and 73.33% over 105 episodes, and better SFT and SPL by 157.18% and 19.53% respectively compared to the baseline. Furthermore, the framework is capable of replanning towards the next most probable candidate location based on the spatial semantic context derived from the 3D semantic map when initial plans fail, keeping an average success rate of 76.67%.
Read more6/27/2024
0
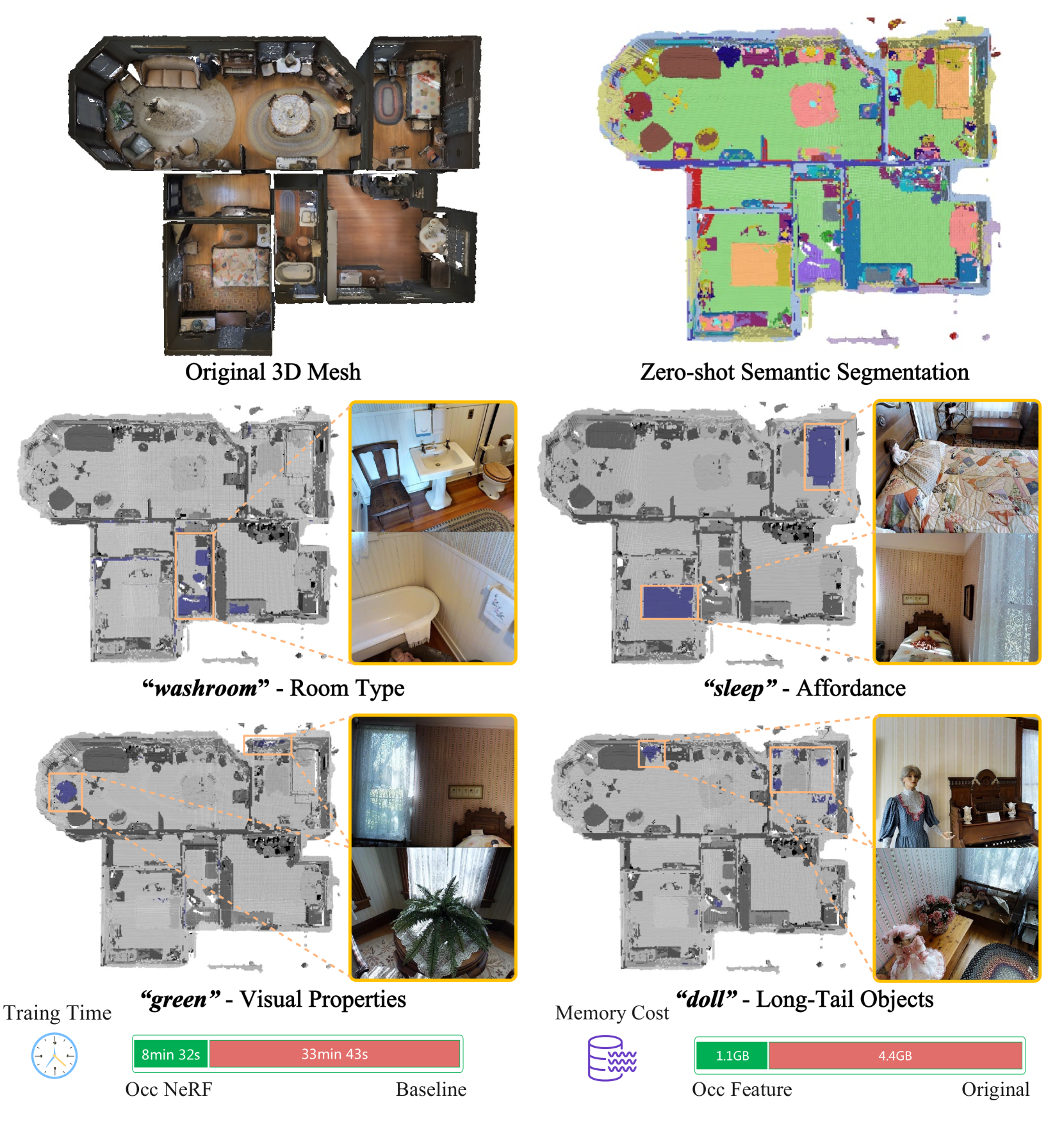
OpenOcc: Open Vocabulary 3D Scene Reconstruction via Occupancy Representation
Haochen Jiang, Yueming Xu, Yihan Zeng, Hang Xu, Wei Zhang, Jianfeng Feng, Li Zhang
3D reconstruction has been widely used in autonomous navigation fields of mobile robotics. However, the former research can only provide the basic geometry structure without the capability of open-world scene understanding, limiting advanced tasks like human interaction and visual navigation. Moreover, traditional 3D scene understanding approaches rely on expensive labeled 3D datasets to train a model for a single task with supervision. Thus, geometric reconstruction with zero-shot scene understanding i.e. Open vocabulary 3D Understanding and Reconstruction, is crucial for the future development of mobile robots. In this paper, we propose OpenOcc, a novel framework unifying the 3D scene reconstruction and open vocabulary understanding with neural radiance fields. We model the geometric structure of the scene with occupancy representation and distill the pre-trained open vocabulary model into a 3D language field via volume rendering for zero-shot inference. Furthermore, a novel semantic-aware confidence propagation (SCP) method has been proposed to relieve the issue of language field representation degeneracy caused by inconsistent measurements in distilled features. Experimental results show that our approach achieves competitive performance in 3D scene understanding tasks, especially for small and long-tail objects.
Read more8/12/2024