Predicting and Analyzing Pedestrian Crossing Behavior at Unsignalized Crossings

0
Sign in to get full access
Overview
- This paper presents a study on predicting and analyzing pedestrian crossing behavior at unsignalized crossings, which are road crossings without traffic signals.
- The researchers developed a framework to forecast pedestrian crossing decisions and understand the factors that influence these decisions.
- The framework was evaluated using real-world data collected from unsignalized crossings, providing insights into pedestrian behavior and the potential to improve safety and traffic management.
Plain English Explanation
Pedestrian safety is a crucial concern, especially at crossings without traffic lights or signals. To address this, the researchers in this paper created a system to predict how pedestrians will behave when crossing the road at these unsignalized crossings. They looked at factors like the speed and distance of approaching vehicles, the pedestrian's own movements, and the overall environment to try and forecast whether a pedestrian will decide to cross the road or wait.
By understanding the various influences on pedestrian crossing decisions, the researchers hope to find ways to improve safety and traffic flow at these types of crossings. For example, the insights from this work could help design better pedestrian infrastructure or adjust the timing of vehicle traffic to reduce the risk of collisions. The end goal is to create smarter, safer transportation systems that work for both drivers and pedestrians.
Technical Explanation
The paper presents a framework for predicting and analyzing pedestrian crossing behavior at unsignalized crossings. The researchers developed a model that can forecast whether a pedestrian will decide to cross the road or wait, based on factors like the speed and distance of approaching vehicles, the pedestrian's own movements, and the surrounding environment.
To evaluate the framework, the team collected real-world data from unsignalized crossings, including video footage and sensor data. They then used this data to train and test their predictive model, comparing its performance to other state-of-the-art approaches. The results showed that the proposed framework was able to accurately forecast pedestrian crossing decisions, providing valuable insights into the decision-making process.
The researchers also conducted analyses to better understand the key factors that influence pedestrian crossing behavior. For example, they found that the distance and speed of approaching vehicles were significant predictors, as were the pedestrian's own movements and the overall complexity of the crossing environment. These findings can help inform the design of safer and more efficient transportation systems that better accommodate both drivers and pedestrians.
Critical Analysis
The paper provides a comprehensive and well-designed study on a important real-world problem. The researchers have developed a robust framework for predicting and analyzing pedestrian crossing behavior, and their evaluation using real-world data is a particular strength.
That said, the paper does acknowledge some limitations. For example, the data collection was limited to a single geographic area, and the model may need to be tested on more diverse crossing environments to validate its generalizability. Additionally, the paper does not delve deeply into the potential ethical or privacy implications of using such predictive technologies, which is an important consideration as these systems become more widespread.
Further research could also explore ways to integrate the predictive model with intelligent transportation systems to enable real-time adaptations to traffic signals, road markings, or other infrastructure. Exploring how the model could be combined with reinforcement learning or other AI techniques to create more autonomous and adaptive crossing systems could also be a fruitful direction.
Conclusion
This paper presents a compelling framework for predicting and analyzing pedestrian crossing behavior at unsignalized crossings. By developing a model that can accurately forecast crossing decisions, the researchers have taken an important step towards creating safer and more efficient transportation systems that better accommodate both drivers and pedestrians.
The insights from this work could lead to various improvements, such as better-designed pedestrian infrastructure, more adaptive traffic signals, and more accurate traffic modeling. As autonomous and connected vehicle technologies continue to advance, tools like the one described in this paper will become increasingly valuable for creating transportation networks that prioritize the safety and mobility of all road users.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Predicting and Analyzing Pedestrian Crossing Behavior at Unsignalized Crossings
Chi Zhang (Department of Computer Science and Engineering, University of Gothenburg, Sweden), Janis Sprenger (German Research Center for Artificial Intelligence), Zhongjun Ni (Department of Science and Technology, Linkoping University, Campus Norrkoping, Sweden), Christian Berger (Department of Computer Science and Engineering, University of Gothenburg, Sweden)
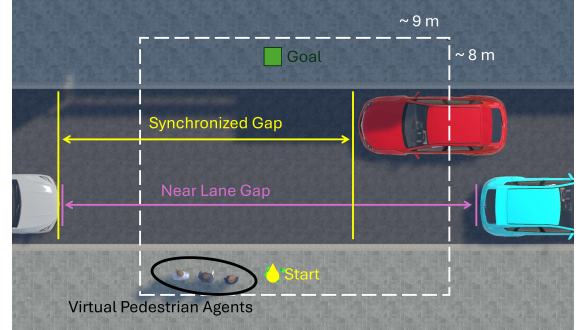
Understanding and predicting pedestrian crossing behavior is essential for enhancing automated driving and improving driving safety. Predicting gap selection behavior and the use of zebra crossing enables driving systems to proactively respond and prevent potential conflicts. This task is particularly challenging at unsignalized crossings due to the ambiguous right of way, requiring pedestrians to constantly interact with vehicles and other pedestrians. This study addresses these challenges by utilizing simulator data to investigate scenarios involving multiple vehicles and pedestrians. We propose and evaluate machine learning models to predict gap selection in non-zebra scenarios and zebra crossing usage in zebra scenarios. We investigate and discuss how pedestrians' behaviors are influenced by various factors, including pedestrian waiting time, walking speed, the number of unused gaps, the largest missed gap, and the influence of other pedestrians. This research contributes to the evolution of intelligent vehicles by providing predictive models and valuable insights into pedestrian crossing behavior.
Read more4/16/2024

0
New!Fast Long-Term Multi-Scenario Prediction for Maneuver Planning at Unsignalized Intersections
Max Bastian Mertens, Jona Ruof, Jan Strohbeck, Michael Buchholz
Motion prediction for intelligent vehicles typically focuses on estimating the most probable future evolutions of a traffic scenario. Estimating the gap acceptance, i.e., whether a vehicle merges or crosses before another vehicle with the right of way, is often handled implicitly in the prediction. However, an infrastructure-based maneuver planning can assign artificial priorities between cooperative vehicles, so it needs to evaluate many more potential scenarios. Additionally, the prediction horizon has to be long enough to assess the impact of a maneuver. We, therefore, present a novel long-term prediction approach handling the gap acceptance estimation and the velocity prediction in two separate stages. Thereby, the behavior of regular vehicles as well as priority assignments of cooperative vehicles can be considered. We train both stages on real-world traffic observations to achieve realistic prediction results. Our method has a competitive accuracy and is fast enough to predict a multitude of scenarios in a short time, making it suitable to be used in a maneuver planning framework.
Read more9/18/2024

0
Cross-cultural analysis of pedestrian group behaviour influence on crossing decisions in interactions with autonomous vehicles
Sergio Mart'in Serrano, 'Oscar M'endez Blanco, Stewart Worrall, Miguel 'Angel Sotelo, David Fern'andez-Llorca
Understanding cultural backgrounds is crucial for the seamless integration of autonomous driving into daily life as it ensures that systems are attuned to diverse societal norms and behaviours, enhancing acceptance and safety in varied cultural contexts. In this work, we investigate the impact of co-located pedestrians on crossing behaviour, considering cultural and situational factors. To accomplish this, a full-scale virtual reality (VR) environment was created in the CARLA simulator, enabling the identical experiment to be replicated in both Spain and Australia. Participants (N=30) attempted to cross the road at an urban crosswalk alongside other pedestrians exhibiting conservative to more daring behaviours, while an autonomous vehicle (AV) approached with different driving styles. For the analysis of interactions, we utilized questionnaires and direct measures of the moment when participants entered the lane. Our findings indicate that pedestrians tend to cross the same traffic gap together, even though reckless behaviour by the group reduces confidence and makes the situation perceived as more complex. Australian participants were willing to take fewer risks than Spanish participants, adopting more cautious behaviour when it was uncertain whether the AV would yield.
Read more8/7/2024

0
Investigating Personalized Driving Behaviors in Dilemma Zones: Analysis and Prediction of Stop-or-Go Decisions
Ziye Qin, Siyan Li, Guoyuan Wu, Matthew J. Barth, Amr Abdelraouf, Rohit Gupta, Kyungtae Han
Dilemma zones at signalized intersections present a commonly occurring but unsolved challenge for both drivers and traffic operators. Onsets of the yellow lights prompt varied responses from different drivers: some may brake abruptly, compromising the ride comfort, while others may accelerate, increasing the risk of red-light violations and potential safety hazards. Such diversity in drivers' stop-or-go decisions may result from not only surrounding traffic conditions, but also personalized driving behaviors. To this end, identifying personalized driving behaviors and integrating them into advanced driver assistance systems (ADAS) to mitigate the dilemma zone problem presents an intriguing scientific question. In this study, we employ a game engine-based (i.e., CARLA-enabled) driving simulator to collect high-resolution vehicle trajectories, incoming traffic signal phase and timing information, and stop-or-go decisions from four subject drivers in various scenarios. This approach allows us to analyze personalized driving behaviors in dilemma zones and develop a Personalized Transformer Encoder to predict individual drivers' stop-or-go decisions. The results show that the Personalized Transformer Encoder improves the accuracy of predicting driver decision-making in the dilemma zone by 3.7% to 12.6% compared to the Generic Transformer Encoder, and by 16.8% to 21.6% over the binary logistic regression model.
Read more5/8/2024